Mech-Eye Viewer のクイックスタート¶


パラメータを調整する¶
パラメータを調整して画像の品質を改善します。
- 2D 画像最適化
2D パラメータ の 露出モード などのパラメータを調整します。露出パラメータを調整する場合、「連続キャプチャ」を使用して効果の明らかな変化が見られます。2D 画像の最適化について詳しくは、 2D 画像関連パラメータ調整 をご参照ください。
固定露出 モードでの異なる露出時間の効果は以下の通りです。
30 ms
120 ms
220 ms
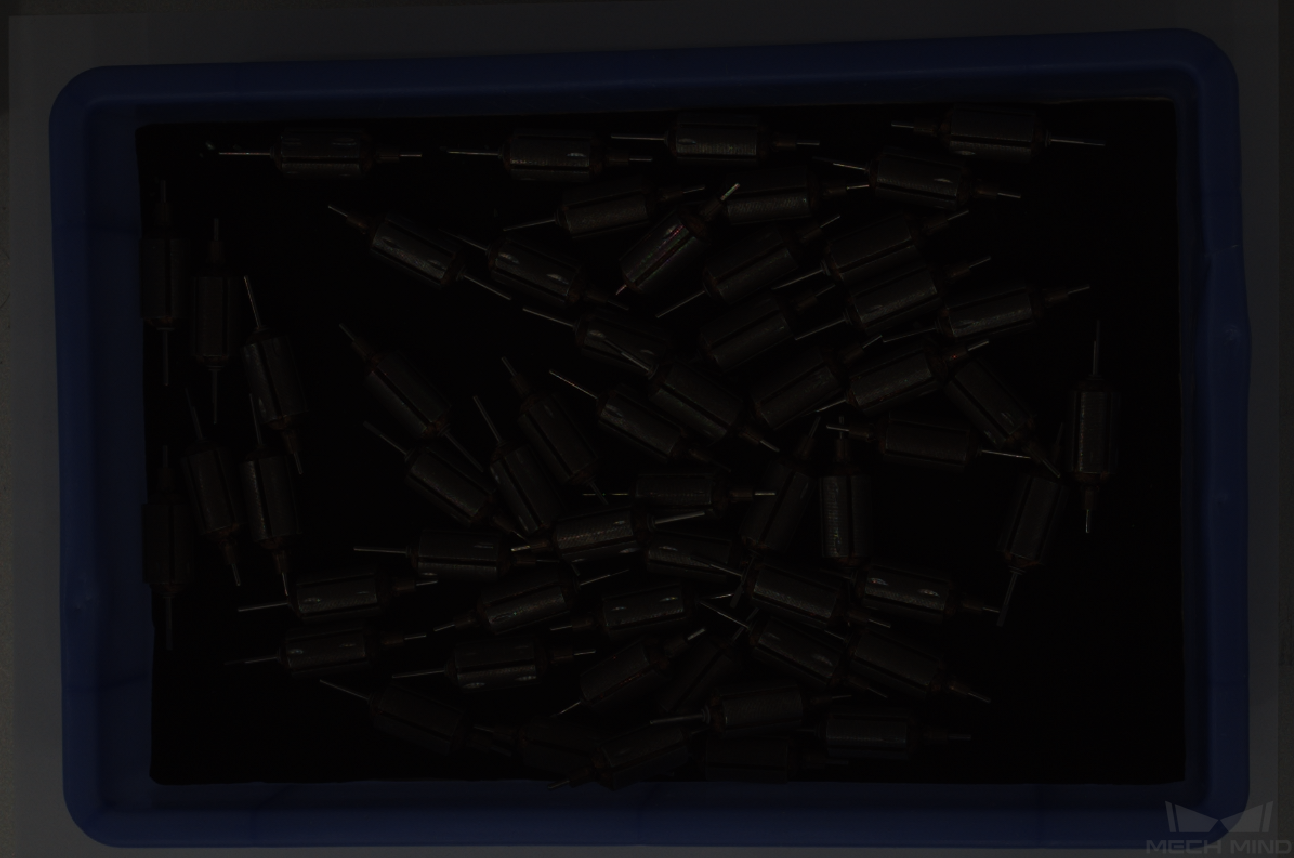
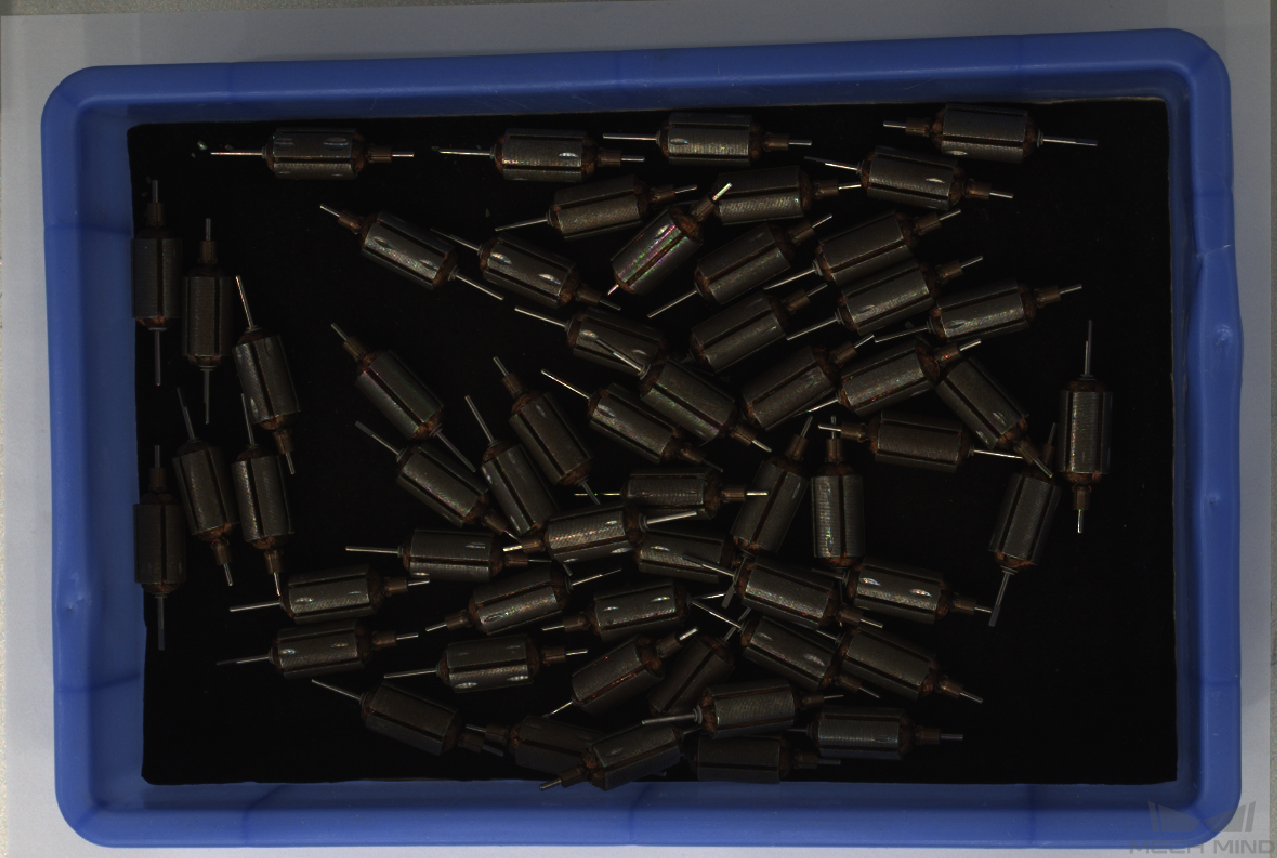

ヒント
輝度は露出時間に依存します。露出時間が長いほど輝度は高くなり、露出時間が短いほど輝度は低くなります。
- 深度画像および点群最適化
3D パラメータ の 露出回数 および 露出時間 を調整します。 露出設定アシスタント を使用して最適な露出パラメータセットを取得できます。深度画像最適化について詳しくは、よく使う深度画像・点群パラメータ調整 をご参照ください。
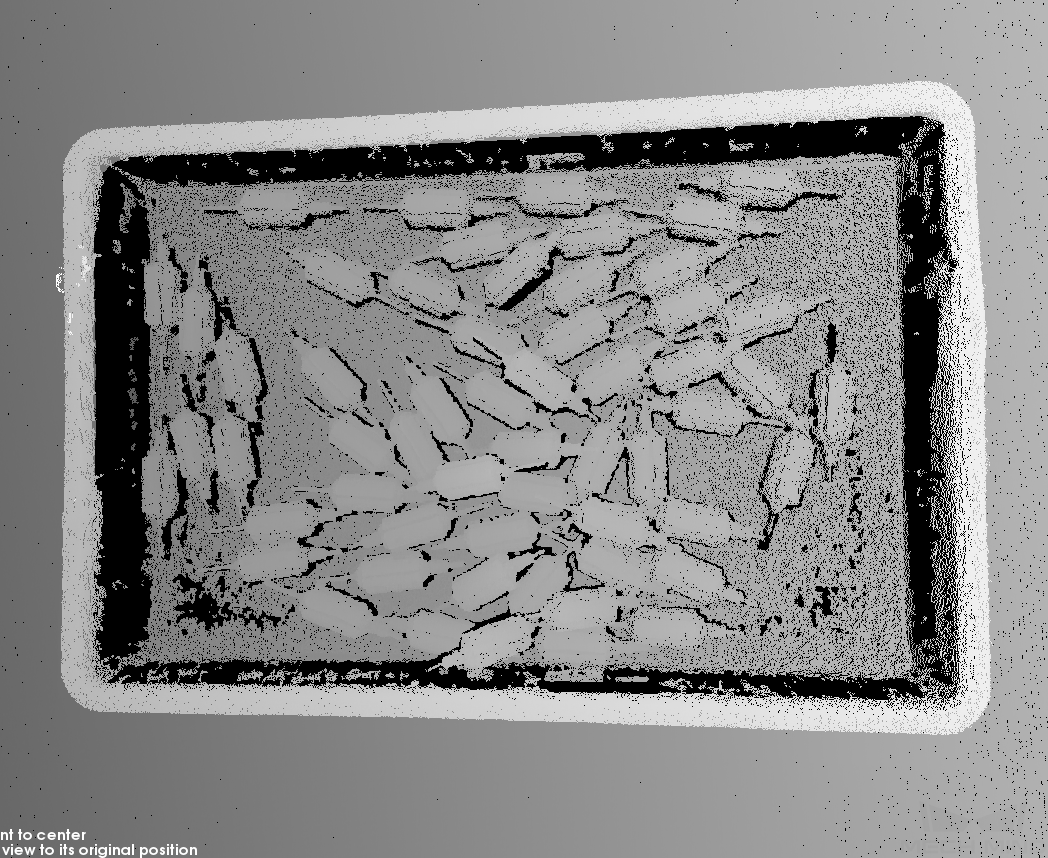
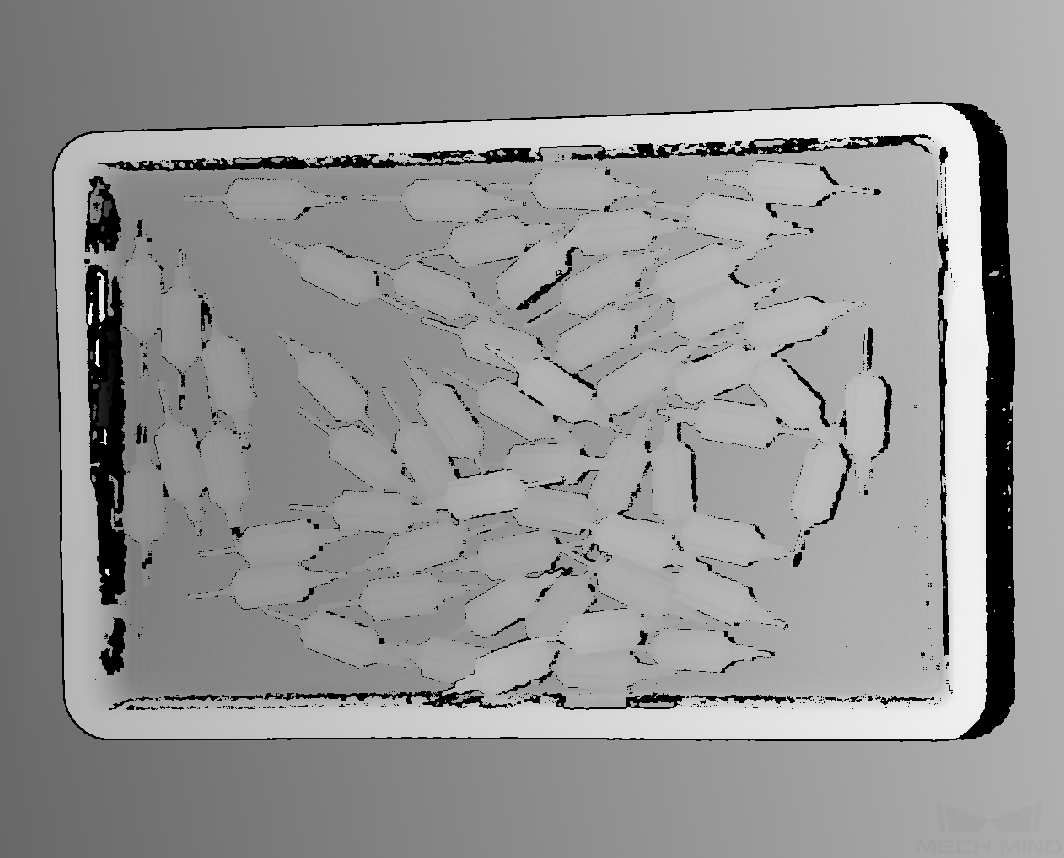
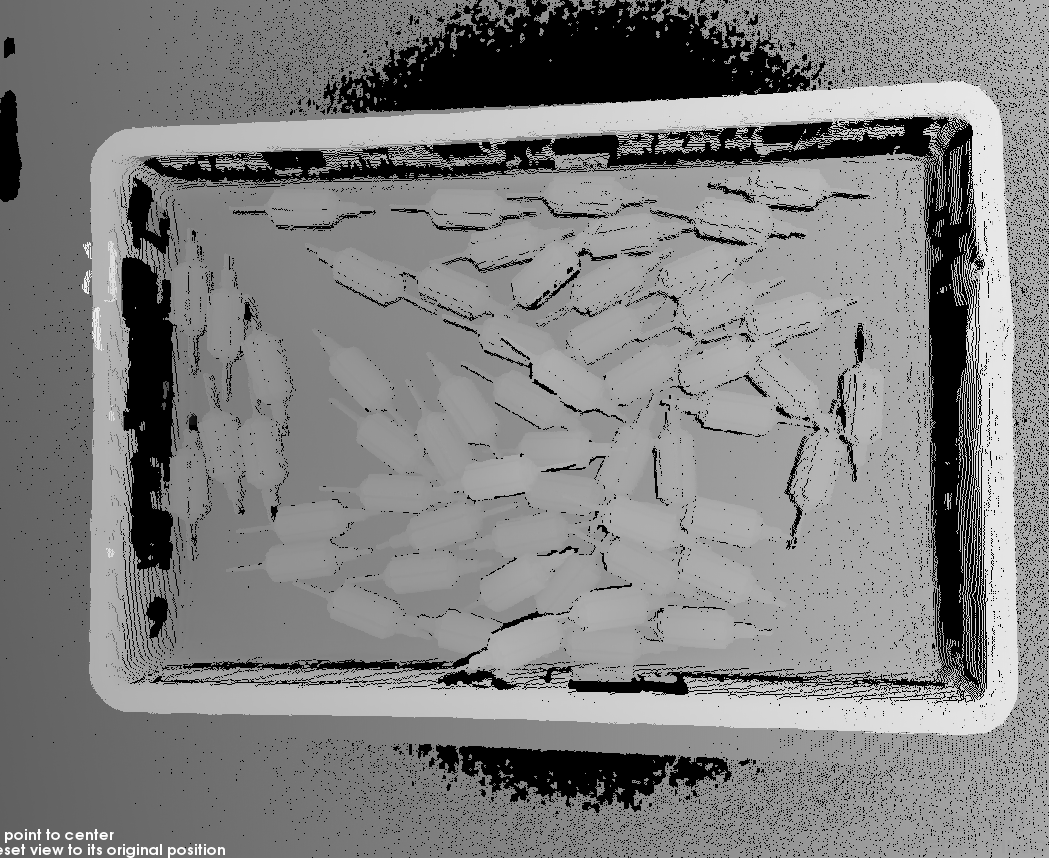
3D パラメータ の調整効果は以下の通りです。
1 ms
4 ms
10 ms
50 ms

- 点群効果最適化
点群後処理 の 点群平滑化 、 ノイズ除去 および 投影輝度コントラストしきい値 を調整します。詳しくは、点群後処理 をご参照ください。
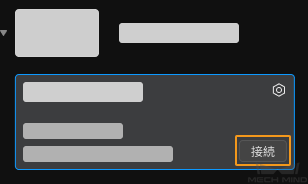
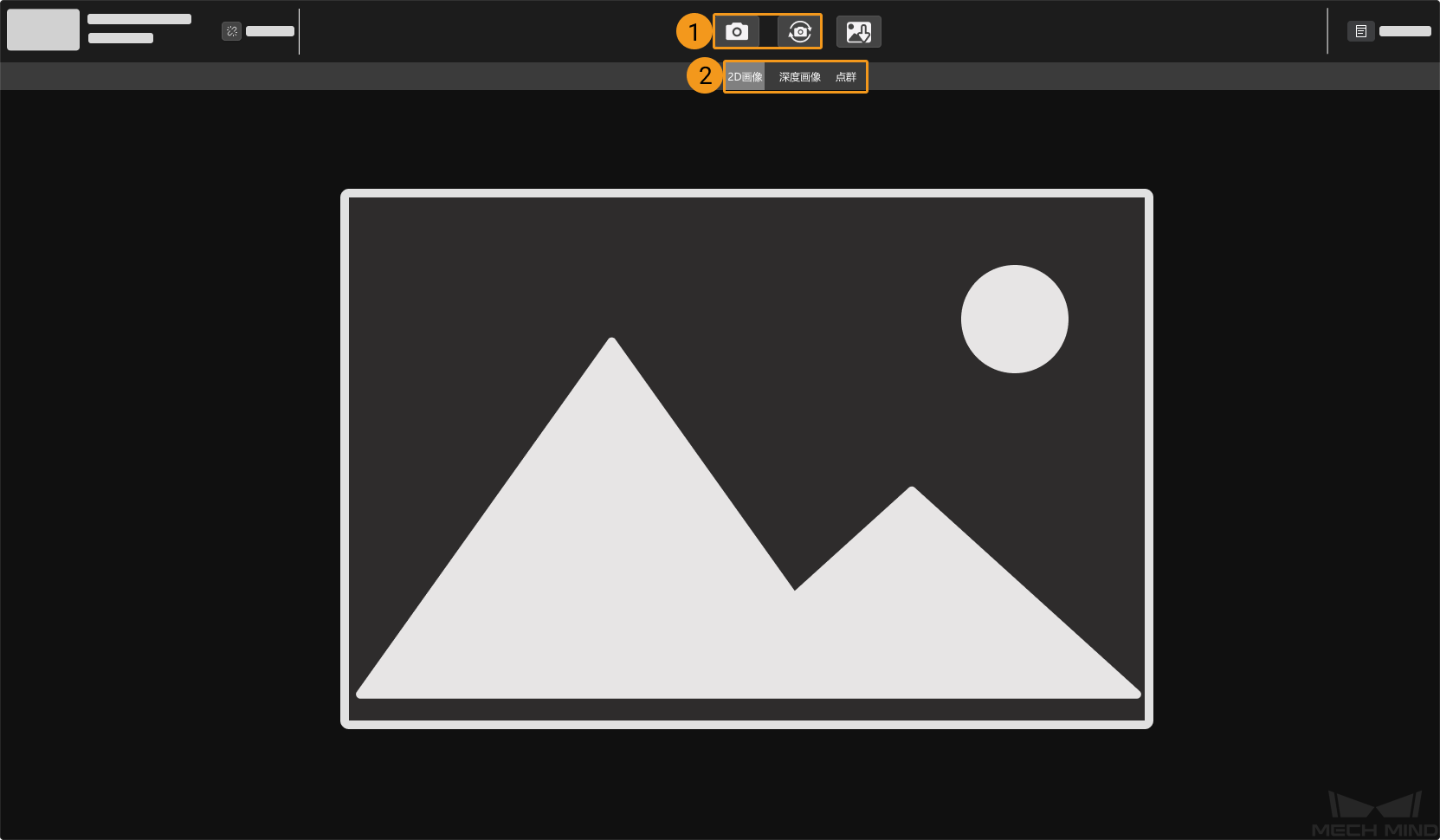
データを保存する¶
をクリックしてカメラの生データを保存します。またはツールバーの  をクリックして画像のタイプを選択して保存します。
をクリックして画像のタイプを選択して保存します。