Mech-Eye SDK 2.0.0 Release Notes¶
This section introduces the new features, improvements and resolved issues in Mech-Eye SDK 2.0.0.
New Features¶
Compliance with GenICam Standard¶
Starting from Mech-Eye SDK 2.0.0, Mech-Eye Industrial 3D Camera is compliant with the machine vision industrial standard GenICam.
Compliance with the GenICam standard provides the following values:
The camera can be controlled by third-party machine vision software that are compliant with the GenICam/GigE Vision 2, such as HALCON (by MVTec) and VisionPro (by Cognex). Currently, HALCON has been tested.
User experience of controlling the camera with a third-party software is improved in aspects including network configuration, parameter adjustment, image capturing and data transmission.
By upgrading the camera firmware to 2.0.0, you can connect to the camera with a third-party software directly.
Hint
It is recommended to use Mech-Vision 1.6.2 and above with camera firmware 2.0.0. If you use Mech-Vision 1.6.1 or below with camera firmware 2.0.0, connecting to cameras in External2D EBUSCamera may cause Mech-Vision to crash.
Mech-Eye Viewer¶
Added Tool for Setting Depth Range
A tool for setting depth range is added in Mech-Eye Viewer 2.0.0. With this tool, you can see the upper and lower limits of the depth range relative to the obtained point cloud while adjusting.
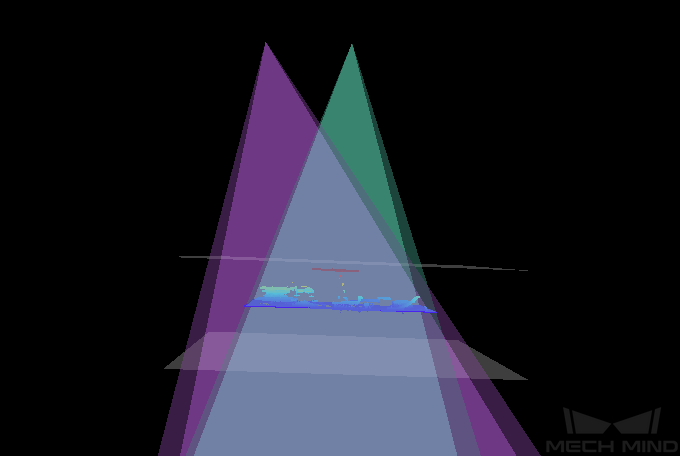
Added Full Pallet Simulator Tool
The Full Pallet Simulator tool is added in Mech-Eye Viewer 2.0.0. With this tool, you can generate a cuboid to simulate a full load on a pallet, and check if the top layer is entirely located within the camera’s field of view. This tool is intended for checking if the camera mounting height is sufficient before project deployment, and provide an estimate amount of adjustment if insufficient.
Added Point Cloud Exhibit Feature
The Point Cloud Exhibit feature is added in Mech-Eye Viewer 2.0.0. When enabled, this feature can move the point cloud along a predetermined trajectory to display the point cloud from various angles.
To enable: check Point Cloud Exhibit in the View menu, and then click the Play button in the upper right of the point cloud display area.
Added Image Information Feature
The Image Information feature is added in Mech-Eye Viewer 2.0.0. When moving the cursor onto the 2D image or depth map, the information of the pixel where the cursor is located is displayed in the lower right.
To disable this feature, uncheck Image Information in the View menu.
Added Camera Name Customization Feature
A camera name customization feature is added in Mech-Eye Viewer 2.0.0. After connecting to a real camera, you can set a custom camera name that is easy to recognize.
Added 2D Camera Binning Feature (Administrator mode)
The 2D camera binning feature is added for the LSR series. When enabled, this feature reduces the resolution of the 2D image obtained by the color 2D camera from 12 MP to 3 MP.
To enable: in Administrator mode, go to and select the color 2D camera. Then, select the EnableBinning checkbox in the bottom and click Apply Config.
Added Link to Troubleshooting Documentation
A ? button is added to the lower right of the Camera List interface in Mech-Eye Viewer 2.0.0. Clicking this button directs you to the troubleshooting guidance in the user manual, where you can find solutions to common camera connection problems.
Mech-Eye API¶
The following parameters are added to Mech-Eye API 2.0.0:
ProjectorPowerLevel: available for DLP cameras, excluding Deep (V3) and Pro L Enhanced (V3).
FringeCodingMode: available for PRO S (V4), PRO M (V4), Nano (V3) and Pro XS (V3).
AntiFlickerMode: available for PRO S (V4), PRO M (V4), NANO (V4) and Nano (V3).
The corresponding parameters and methods for C++, C# and Python are listed below.
C++
Parameter
Method
ProjectorSettings:: PowerLevel::powerLevel
ErrorStatus MechEyeDevice::getProjectorPowerLevel (ProjectorSettings::PowerLevel &)
ErrorStatus MechEyeDevice::setProjectorPowerLevel (ProjectorSettings::PowerLevel)
ProjectorSettings:: FringeCodingMode::fringeCodingMode
ErrorStatus MechEyeDevice::getProjectorFringeCodingMode (ProjectorSettings::FringeCodingMode &)
ErrorStatus MechEyeDevice::setProjectorFringeCodingMode (ProjectorSettings::FringeCodingMode)
ProjectorSettings:: AntiFlickerMode::antiFlickerMode
ErrorStatus MechEyeDevice::getProjectorAntiflickerMode (ProjectorSettings:AntiFlickerMode &)
ErrorStatus MechEyeDevice::setProjectorAntiflickerMode (ProjectorSettings:AntiFlickerMode)
C#
Parameter
Method
ProjectorSettings.projectorPowerLevel Type: ProjectorSettings::PowerLevel
ErrorStatus MechEyeDevice.GetProjectorPowerLevel (mmind.apiSharp.PowerLevel ref)
ErrorStatus MechEyeDevice.SetProjectorPowerLevel (mmind.apiSharp.PowerLevel)
ProjectorSettings.projectorFringeCodingMode Type: ProjectorSettings::FringeCodingMode
ErrorStatus MechEyeDevice.GetProjectorFringeCodingMode (mmind.apiSharp.FringeCodingMode ref)
ErrorStatus MechEyeDevice.SetProjectorFringeCodingMode (mmind.apiSharp.FringeCodingMode)
ProjectorSettings.projectorAntiFlickerMode Type: ProjectorSettings::AntiFlickerMode
ErrorStatus MechEyeDevice.GetProjectorAntiFlickerMode (mmind.apiSharp.AntiFlickerMode ref)
ErrorStatus MechEyeDevice.SetProjectorAntiFlickerMode (mmind.apiSharp.AntiFlickerMode)
Python (new methods only)
Device.get_projector_power_level(self)
Device.set_projector_power_level(self, value)
Device.get_projector_fringe_coding_mode(self)
Device.set_projector_fringe_coding_mode(self, value)
Device.get_projector_anti_flicker_mode(self)
Device.set_projector_anti_flicker_mode(self, value)
Feature Improvements¶
Mech-Eye Viewer¶
Improved the tool for setting an ROI.
Handles are added to the ROI selection box, allowing for size adjustment and movement of the box.
Scrolling to zoom the 2D image is added.
Limits of the max and min zoom size of the 2D image are added.
Improved the display depth range adjustment feature of the depth map/point cloud display.
The colorbar and slider are combined for more intuitive range adjustment.
Fields for entering the upper and lower limits of the display depth range are added.
Unit change feature is added: Units include mm and
 . For the UHP series, is recommended. For other series, mm is recommended.
. For the UHP series, is recommended. For other series, mm is recommended.
Improved the parameter names and descriptions. For a list of changed parameter names, please refer to Appendix .
The Anti-Flicker Mode parameter is now available for the Nano (V3) and NANO (V4) series.
DLP Projector temperature can now be read and displayed for the PRO (V4) series (in the Camera Controller tool).
Updated the minimum value of 3D Parameters - Exposure Time to 8 ms for the LSR series.
Added DEEP (V4) to FOV Calculator.
Changed the visibility level of Sharpen Factor to Guru.
Improved release notes: By selecting , you can now open the release notes in the user manual, which provides detailed information on the changes introduced in the current version.
Mech-Eye API¶
Improved the error messages.
Improved the names of C++ parameters in MechEyeSettings.
Improved the names of C# parameters and methods.
Resolved Issues¶
Mech-Eye Viewer¶
Resolved the abnormality of the textured point cloud obtained by the 12 MP variants of Pro L Enhanced and Laser L Enhanced (V3 and V3S) when binning had been enabled.
Resolved the issue where firmware 1.4.0 could not be upgraded to the latest version.
Resolved the issue where both the new and old camera IP addresses showed up in Mech-Vision after the camera IP address had been changed in Mech-Eye Viewer.
Resolved the occasional failure of depth data acquisition with Nano and Pro XS (V3).
Mech-Eye API¶
Resolved the issue where the Connect method could not be called repetitively.
Appendix¶
The following table lists the names of Beginner level parameters and parameter categories that are updated in Mech-Eye SDK 2.0.0.
Before 2.0.0 |
2.0.0 |
||||
3D Scanning |
3D Parameters |
||||
Scan Multiplier |
Exposure Multiplier |
||||
Exposure Time |
- |
||||
UHP |
- |
||||
Capture Mode |
- |
||||
2D Scanning |
2D Parameters |
||||
Exposure Mode |
- |
||||
Exposure Time |
- |
||||
Scan2D Expected Gray Value |
Gray Value |
||||
2D Auto-Exposure ROI |
Auto-Exposure ROI |
||||
Geometry |
Values |
||||
Scan2D Tone Mapping Enable |
Tone Mapping |
||||
HDR Exposure Sequence |
Exposure Sequence |
||||
Exposure Sequence |
Values |
||||
Texture Role Camera Exposure Mode |
Color Camera Exposure Mode |
||||
Pattern Role Camera Exposure Mode |
Monochrome Camera Exposure Mode |
||||
Pattern Role Camera Exposure Time |
Monochrome Camera Exposure Time |
||||
Point Cloud Processing |
- |
||||
Cloud Smooth Mode |
Point Cloud Smoothing |
||||
Cloud Outlier Filter Mode |
Outlier Removal |
||||
Fringe Contrast Threshold |
Stripe Contrast Threshold |
||||
Depth Range |
- |
||||
Depth Upper Limit |
- |
||||
Depth Lower Limit |
- |
||||
3D ROI |
ROI |
||||
Geometry |
Values |
||||
Note
“-” indicates that the parameter name remains unchanged. Only the parameter description is updated.
Some parameters are only available for certain models.