TM(达明)标准接口通信配置¶
本节介绍如何配置 TM 标准接口通信。
准备工作¶
请在开始操作前:
检查 机器人控制软件 TMflow 版本为 1.84 或以上。
检查梅卡曼德系统软件版本为 1.6.1 或以上。
收集机器人的 IP 地址,例如 192.168.2.10。
获取机器人的控制权¶
有以下两种方式可以获取机器人的控制权,根据实际情况选择任意一种方式即可。
控制柜获取机器人控制权¶
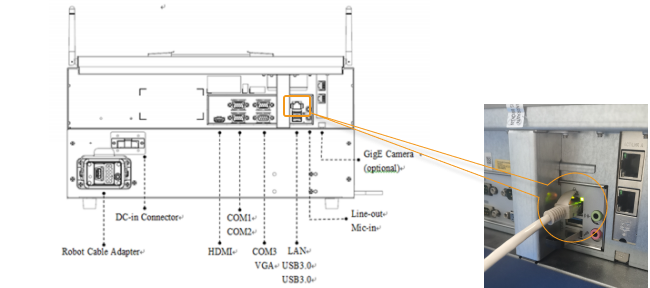
控制柜上有 HDMI 和 USB 孔位,可将显示器、键盘和鼠标连接至控制柜。
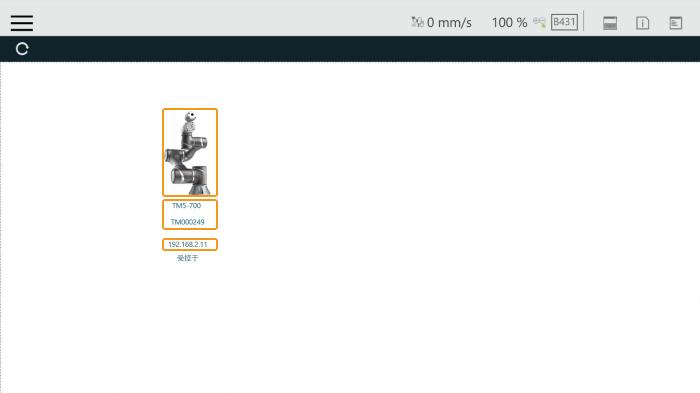
单击
 ,等待联机画面出现对应的机器人编号。
,等待联机画面出现对应的机器人编号。
通过以下任一方式连接上机器人:
双击机器人图标
双击机器人编号
双击机器人 IP 地址
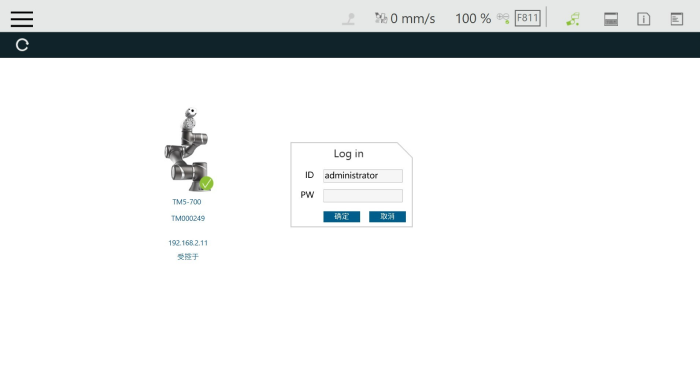
在登录窗口,输入 ID 和密码后(默认 administrator 无密码),单击 确定 。
单击 取得控制权 以获取对机器人的控制。
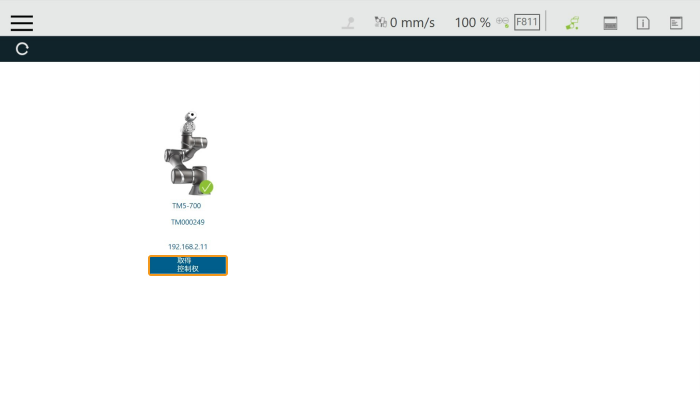
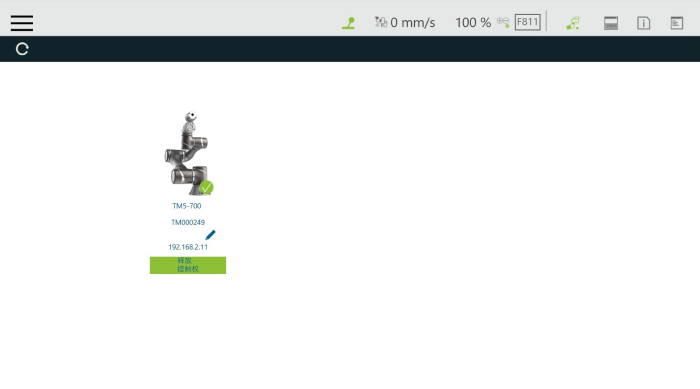
成功获取机器人的控制权后,如下图所示。
工控机获取机器人控制权¶
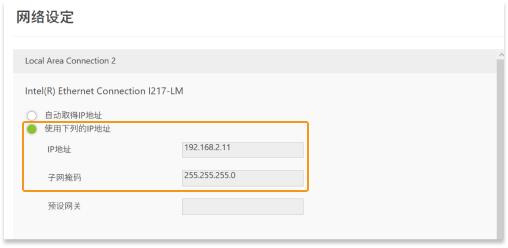
设置工控机 IP 地址¶
注意
将工控机连接控制柜的网口 IP 设置在机器人 IP 的同一网段下。否则无法连接到机器人。
设置 Mech-Vision 中“机器人与通信配置”¶
单击 Mech-Vision 工具栏中 机器人与接口配置 。
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 TM 机器人型号,单击 下一步 。
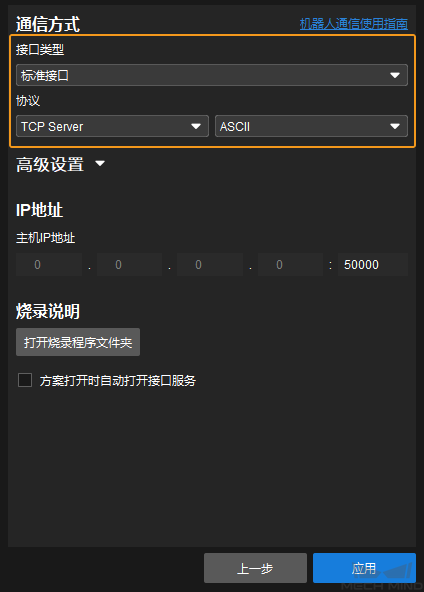
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 ASCII ,最后单击 应用 。
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录标准接口程序¶
本文以使用工控机烧录的方式为例。使用控制柜烧录的方式类似。
准备待烧录的标准接口程序文件¶
将 U 盘插入工控机的 USB 接口。
将 U 盘重命名为 TMROBOT,否则达明机器人控制柜不识别。
在梅卡曼德系统软件的安装目录
Mech-Center\Robot_Interface\Robot_Plugin\TM_Plugin_and_Play文件夹下,将 TM_Export 文件夹复制到 U 盘中。完成后,将 U 盘插入控制柜的 USB 接口。
备份机器人文件¶
为了避免烧录操作对机器人系统造成影响,建议在开始烧录前备份机器人系统文件。 若操作过程中出现问题,您可使用备份文件还原机器人系统。
打开 TMflow 软件,单击界面左上角的
 按钮,然后依次单击 。
按钮,然后依次单击 。
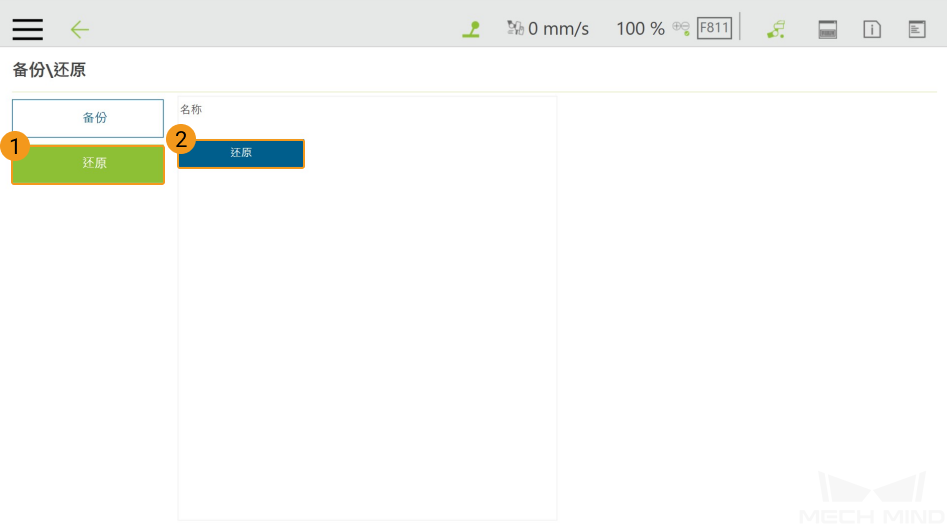
单击 备份 ,然后在 File Name 后的输入框中输入备份文件名称,最后单击 备份 。
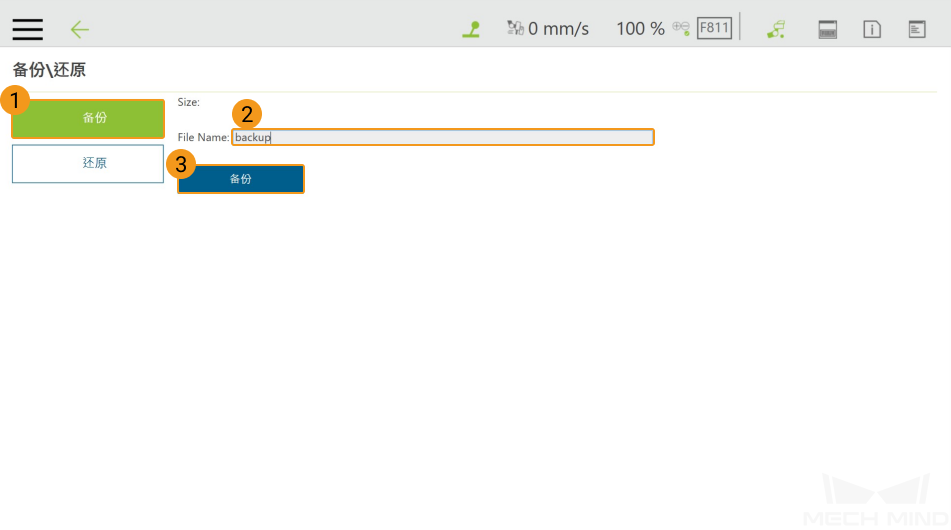
若需还原,单击左侧 还原 ,然后单击 还原 。
烧录标准接口程序到机器人¶
烧录前,请长按机器人控制棒上的 M/A 按钮将机器人切换到手动模式,即 Manual 灯常亮。若机器人已处于手动模式请跳过此步。
打开 TMflow 软件,单击
后依次单击 。
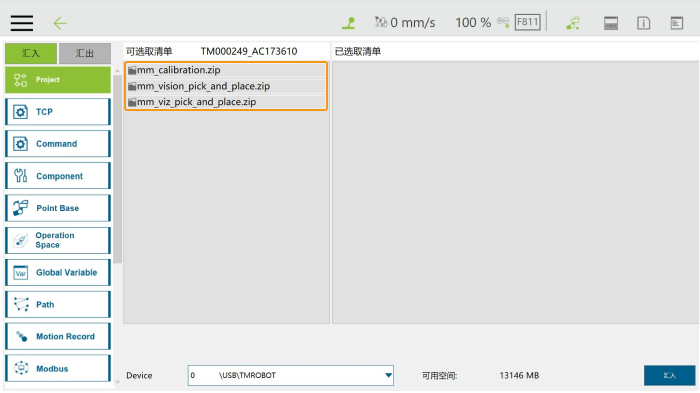
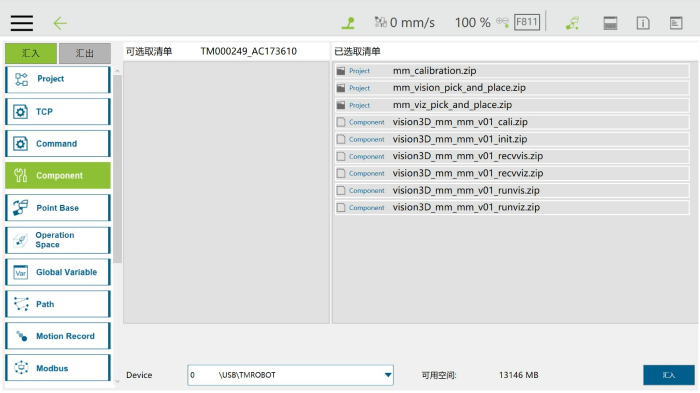
单击左上角的 汇入 。

在弹出的窗口中选中烧录文件夹(TM000249_AC173610)后,单击 OK 。

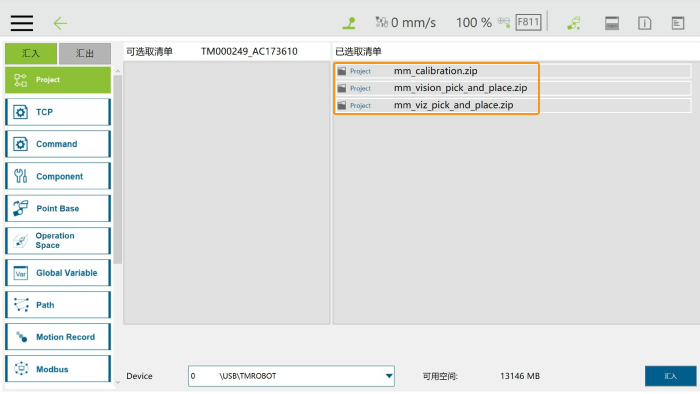
单击左侧的 Project 后,依次单击 可选取清单 中的全部文件,文件将进入 已选取清单 。
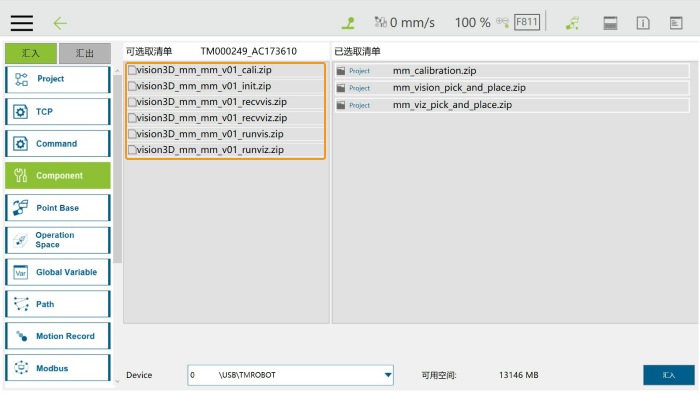
单击左侧的 Component 后,依次单击 可选取清单 中的全部文件,文件将进入 已选取清单 。
单击左侧的 Global Variable 后,依次单击 可选取清单 中的全部文件,文件将进入 已选取清单 。
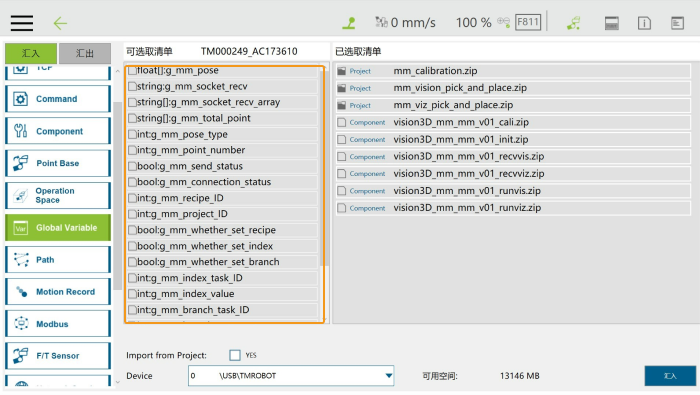
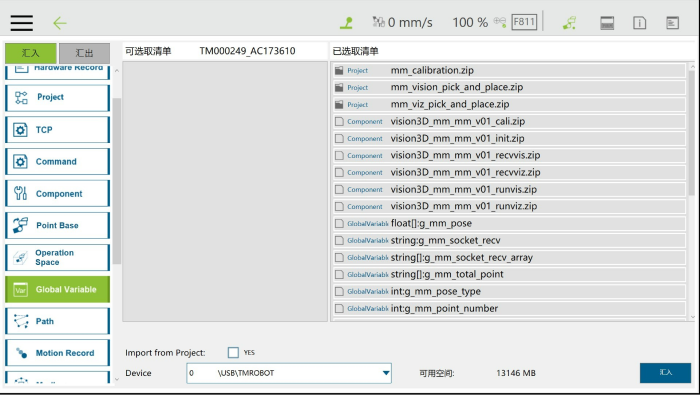
单击界面右下角的 汇入 ,在弹出的窗口中单击 确定 。

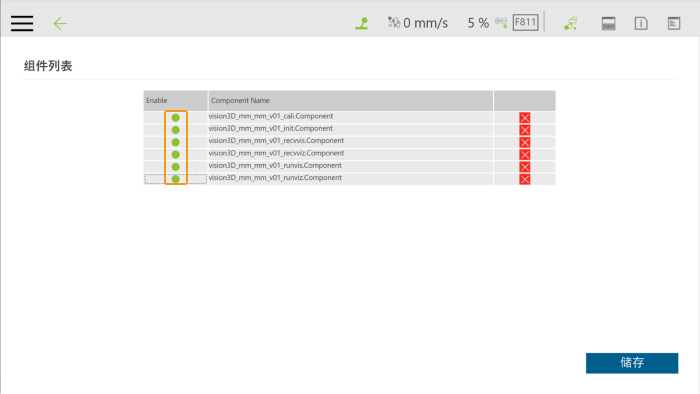
单击
后,依次单击 。
勾选所有组件后,单击 储存 。
完成以上操作后, 拔出 U 盘 。
测试机器人连接状态¶
单击
后,单击左侧的 专案,进入下图所示界面。
单击左上角的
 后,在弹出的窗口中,输入自定义项目名称后,单击 确认 。
后,在弹出的窗口中,输入自定义项目名称后,单击 确认 。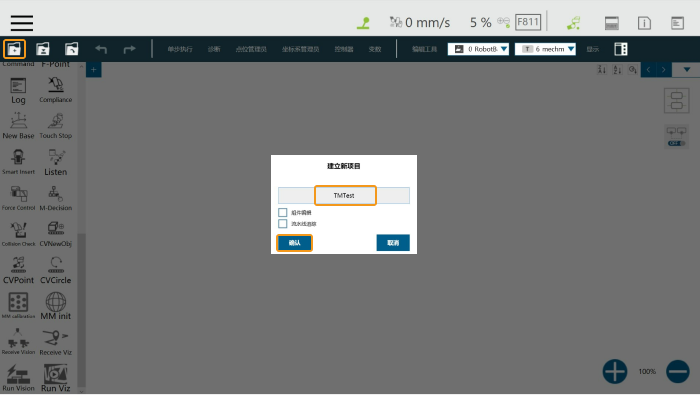
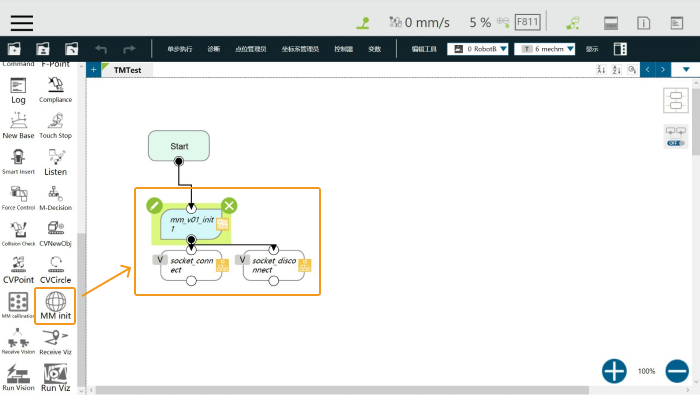
拖动左侧功能块中的 MM init 到编辑区。
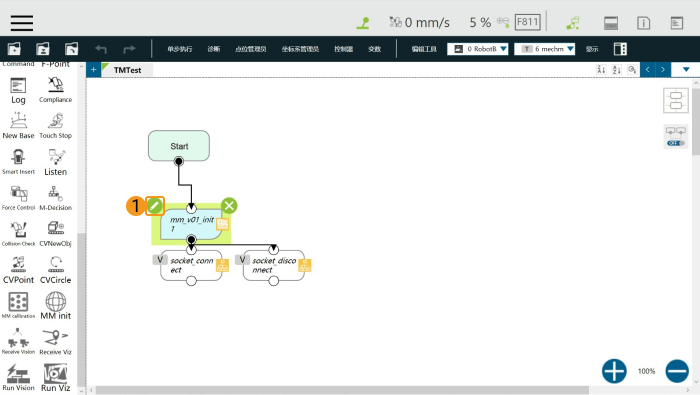
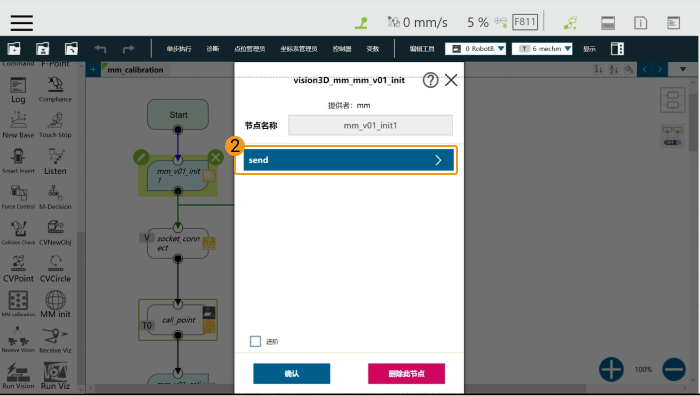
单击位于 init 组件左上方的
 。
。
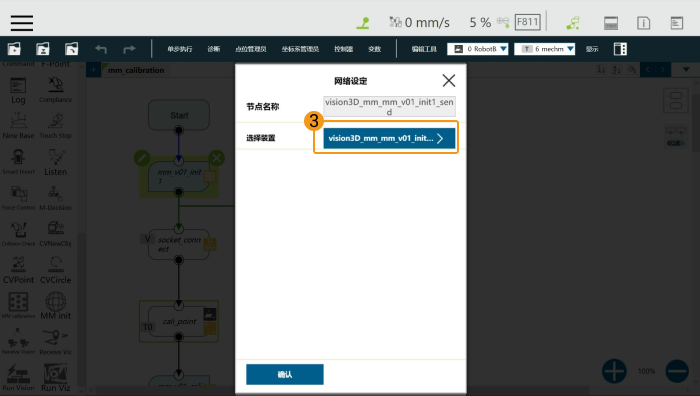
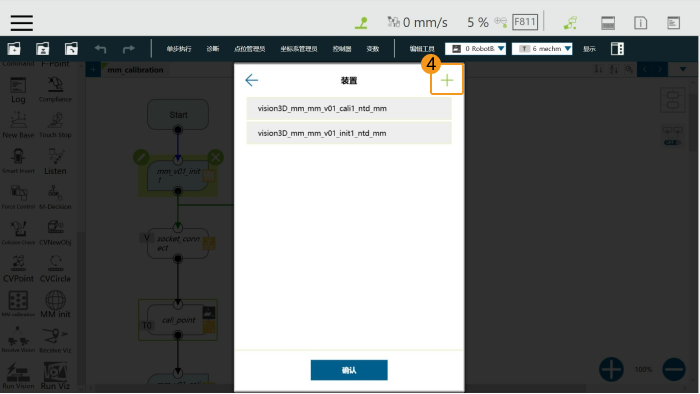
依次单击下图所示标识的部分。
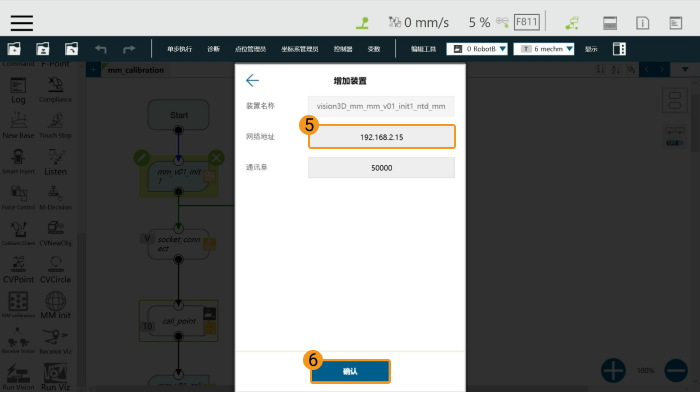
在网络地址处填写工控机连接机器人网口的 IP 地址后,单击 确认 。
长按控制棒上的 M/A ,直至听到一声“嘀”后,松开 M/A 。 按顺序依次按下 + - + + -,auto下的显示灯亮起后说明机器人已经切换到自动模式下。
此时按下控制棒上的 运行 键,在“嘀嘀嘀”三声之后程序开始运行。
若连接成功,则 Mech-Vision 日志窗口的 Console 标签页下会出现相关提示。
测试完毕后,按下控制棒上的 停止 键。