分類¶
機能¶
ビジョン処理による認識 の前・後に実行します。Mech-Vision によって認識された対象物のラベルによって分岐を選択します。
使用シーン¶
Mech-Vision によって認識された対象物のラベルによって分類します。
「ビジョン処理による移動」ステップの前に:
デフォルトの把持流れは:対象物を認識する > ラベルによって異なる分岐を実行する > そのラベルの対象物を把持する。
例:異なる部品を把持するシーンでグリッパを交換する場合に使用します。
「ビジョン処理による移動」ステップの後に:
デフォルトの把持流れは:対象物を認識する > 対象物を把持する > 対象物の種類によって異なる分類操作を実行する。
例:グリッパを変更せず、対象物を分類してから異なるコンテナに配置する場合に使用します。
パラメータ説明:¶
- 非移動ステップの共通パラメータ
詳しくは 非移動ステップの共通パラメータ をお読みください。
- 「把持対象物を更新」からラベルを取得
チェック:
説明:このステップの前には 把持済み対象物を更新 ステップであり、現在の把持対象物のラベルの情報を取得してから分類の設定によって異なる動作を実行します。対象物の積み重ねなどで対象物のラベルの情報を取得できない場合、対象物を把持してから二回目の分類を実行し、ラベルを出力することができます。チェックしない:
初期値です。Mech-Vision で認識された対象物のラベルを使用します。ビジョン処理による移動の前に分類 をチェックして対応する ビジョン処理による移動 ステップを選択する必要があります。
ラベルを読み込む、ラベルを追加
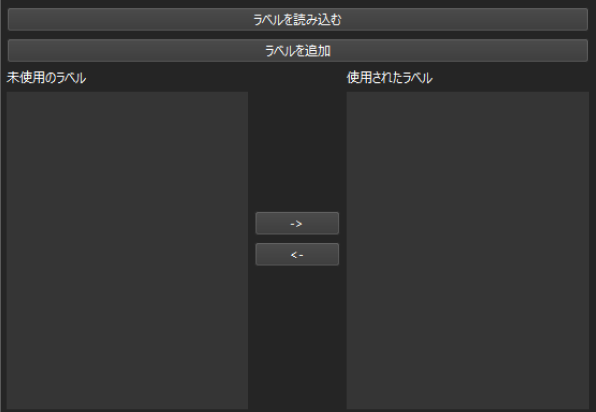
- ラベルを読み込む
- ラベルを追加
ラベルを追加 をクリックすると 未使用のラベル リストに unnamed_label ラベルが表示されます。このラベルをダブルクリックするとラベル名を編集できます。
- ラベルリスト
未使用のラベル と 使用されたラベル の2つのリストがあります。ラベル名を選択してから
または
をクリックすると移動できます。
使用されたラベル は「分類」ステップの出口に表示されます。また、その他 出口もあり、使用されたラベル にないラベルに対応します。