TM Calibration Program¶
This topic introduces the process of automatic hand-eye calibration when a TM robot communicates with Mech-Mind Vision System through Standard Interface.
Before performing the following operations, please make sure that:
You have set up Standard Interface communication with the robot.
You are familiar with the contents in Hand-Eye Calibration Guide.
The robot is in the Manual mode, i.e., the green Manual light is on. If the robot is in the Auto mode, please press and hold the M/A button on the Robot Stick to switch to the Manual mode.
The calibration process is as follows:
Load the Calibration program¶
Click
 and select Project to open the window as shown below.
and select Project to open the window as shown below.
Click
 , and select mm_calibaration in the pop-up window, and then click OK.
, and select mm_calibaration in the pop-up window, and then click OK.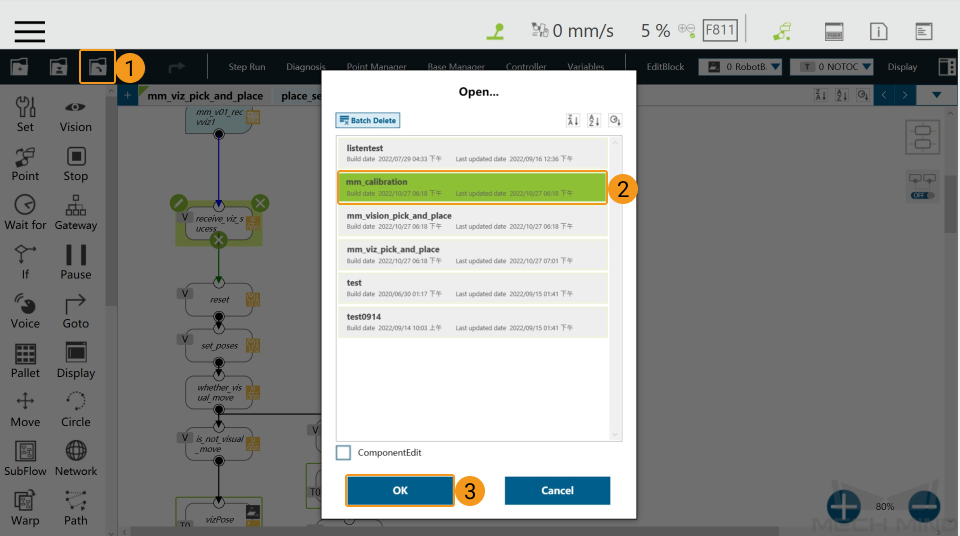
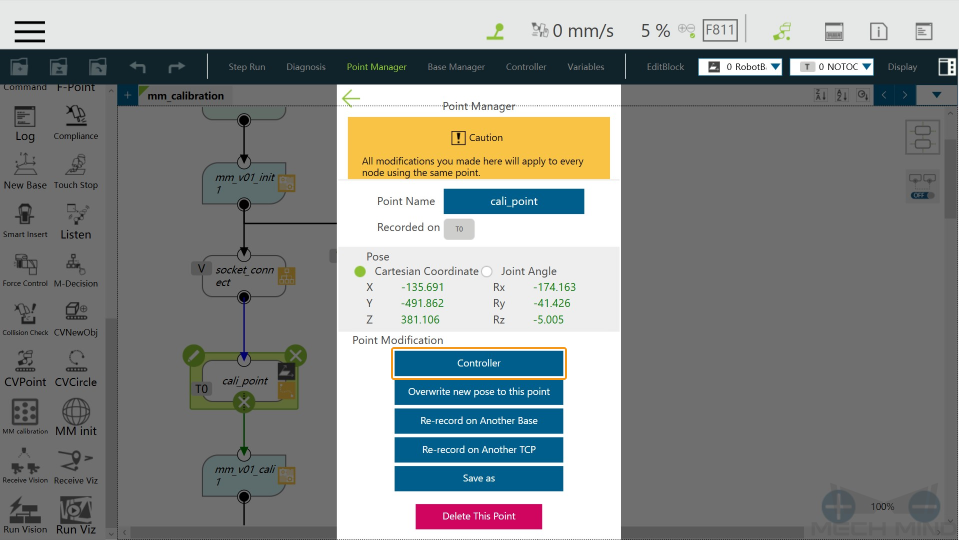
Set the Start Point for Calibration¶
Click Point Manager.

Click
 in the pop-up window.
in the pop-up window.
Click Controller.
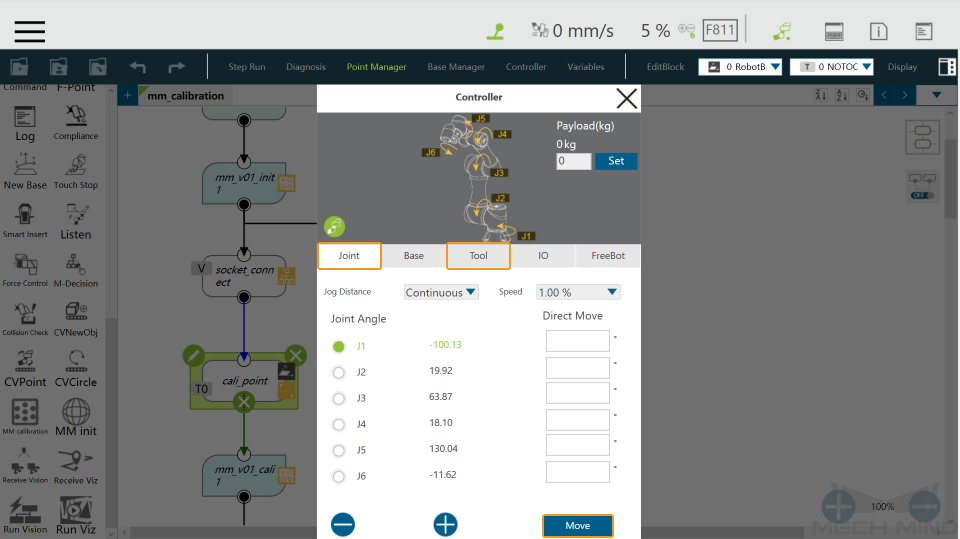
Adjust the robot pose in the Joint or Tool tab, and click Move when finished.
Note
This point is the first point where the camera captures the image for hand-eye calibration. Please make sure that the calibration board is at the center of the camera’s field of view.
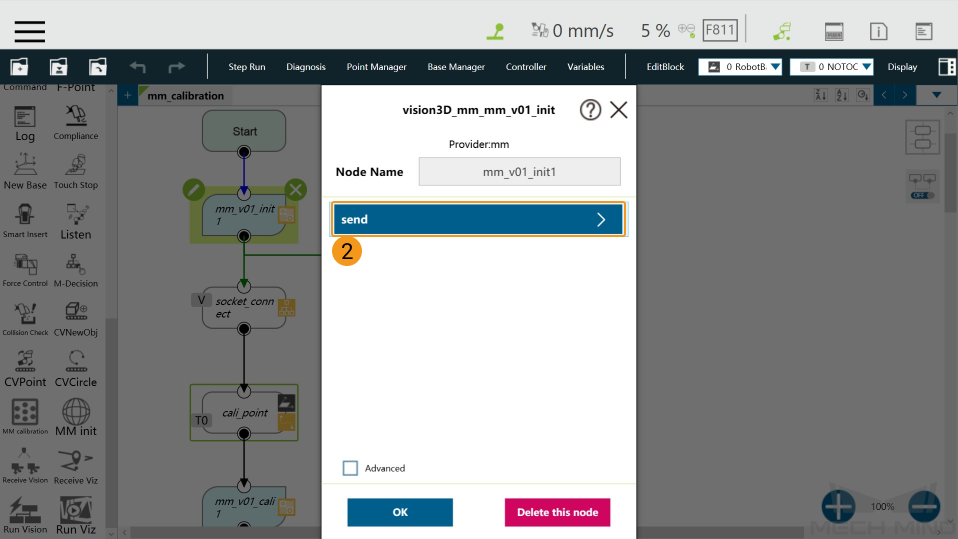
Configure the IP Address of the IPC¶
Click the
 icon in the upper left corner of the mm_v01_init1 node.
icon in the upper left corner of the mm_v01_init1 node.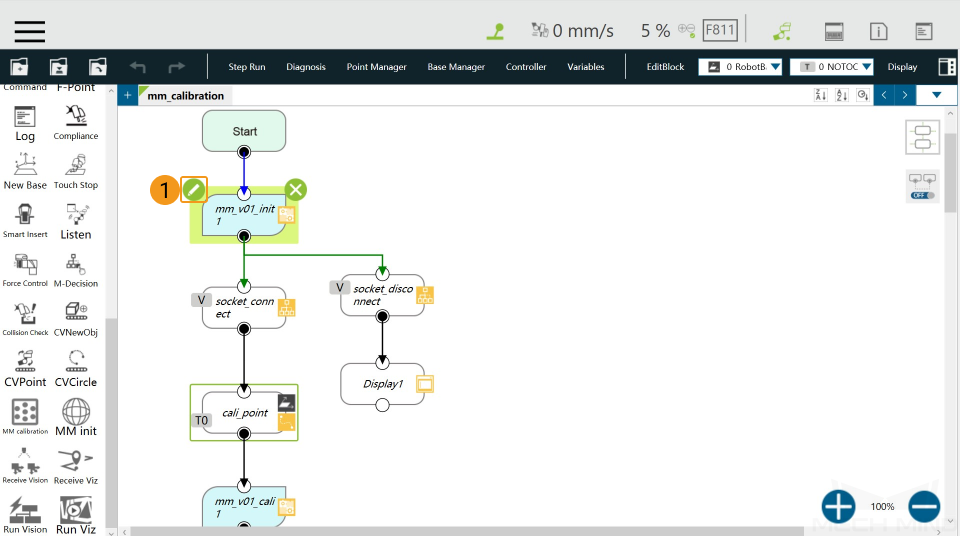
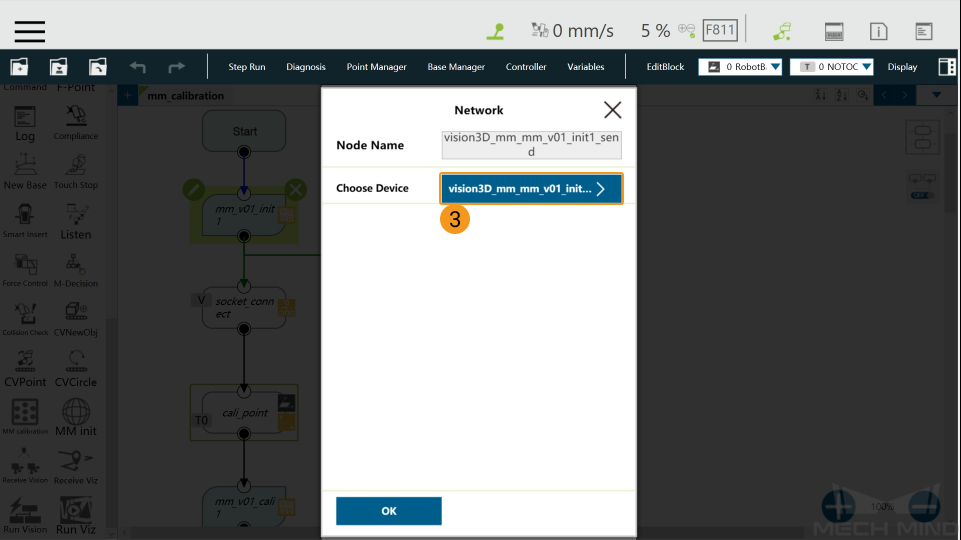
Click send, and select vision3D_mm_mm_v01_init1_ntd_mm in the Network window.
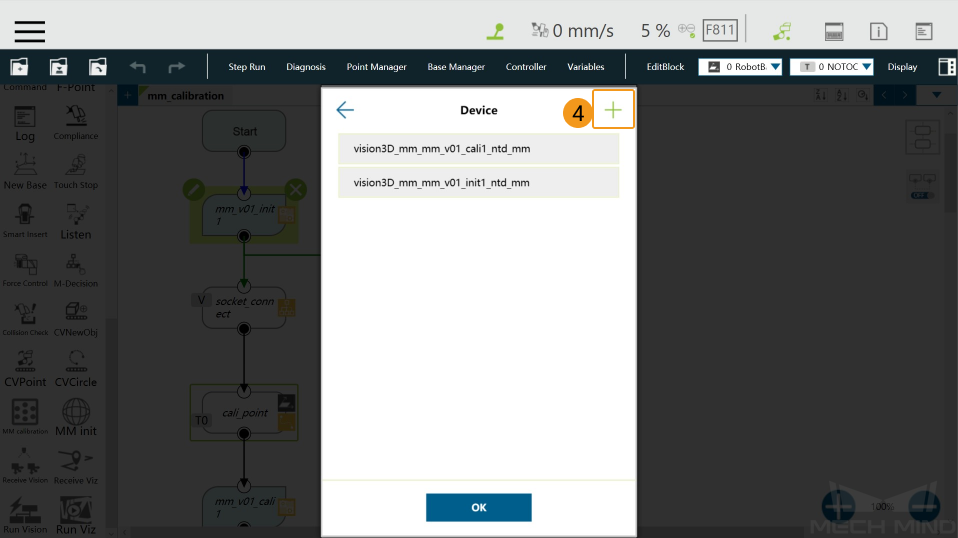
Click + in the Device window.
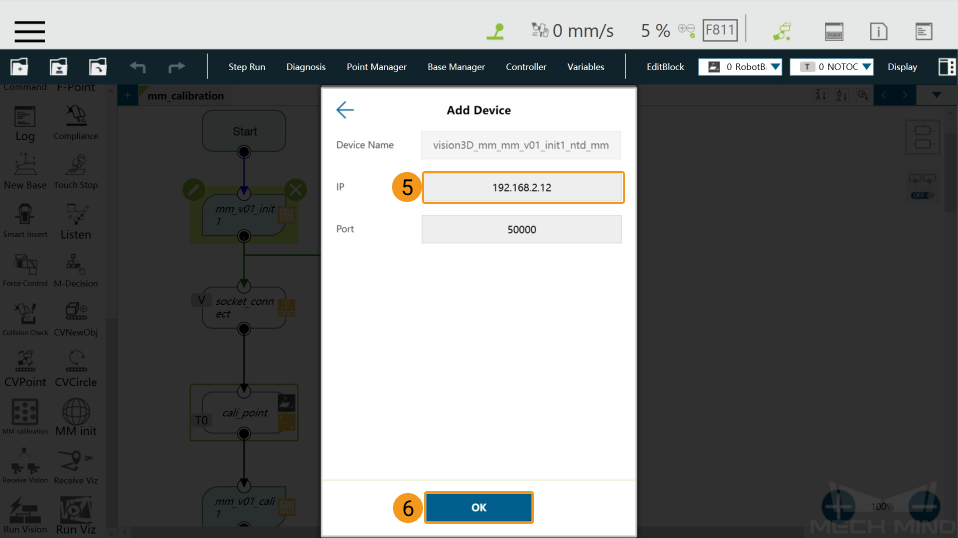
Enter the IP address of the IPC in the Add Device window and click OK.
Run the Calibration Program¶
In the Manual mode (the green Manual light is on), press the Run button on the Robot Stick to run the calibration program.

Make sure that the message “Entering the calibration process, please start the calibration in Mech-Vision” is displayed in the Console tab of Mech-Vision Log panel.
Complete Calibration in Mech-Vision¶
In Mech-Vision, click Camera Calibration (Standard) on the toolbar, or select from the menu bar.
Follow the instructions in Mech-Vision to complete the configuration.
If the camera is mounted in the eye-to-hand mode, please refer to Complete Automatic Calibration in the Eye to Hand Scenario.
If the camera is mounted in the eye-in-hand mode, please refer to Complete Automatic Calibration in the Eye in Hand Scenario.
Note
If the robot does not reach the next calibration point within 60 seconds, Mech-Vision will report a timeout error and stop the calibration process. In such cases, please select and run the calibration program on the teach pendant again, and restart the calibration process in Mech-Vision.