Decompose Poses to Quaternions and Translations¶
Function¶
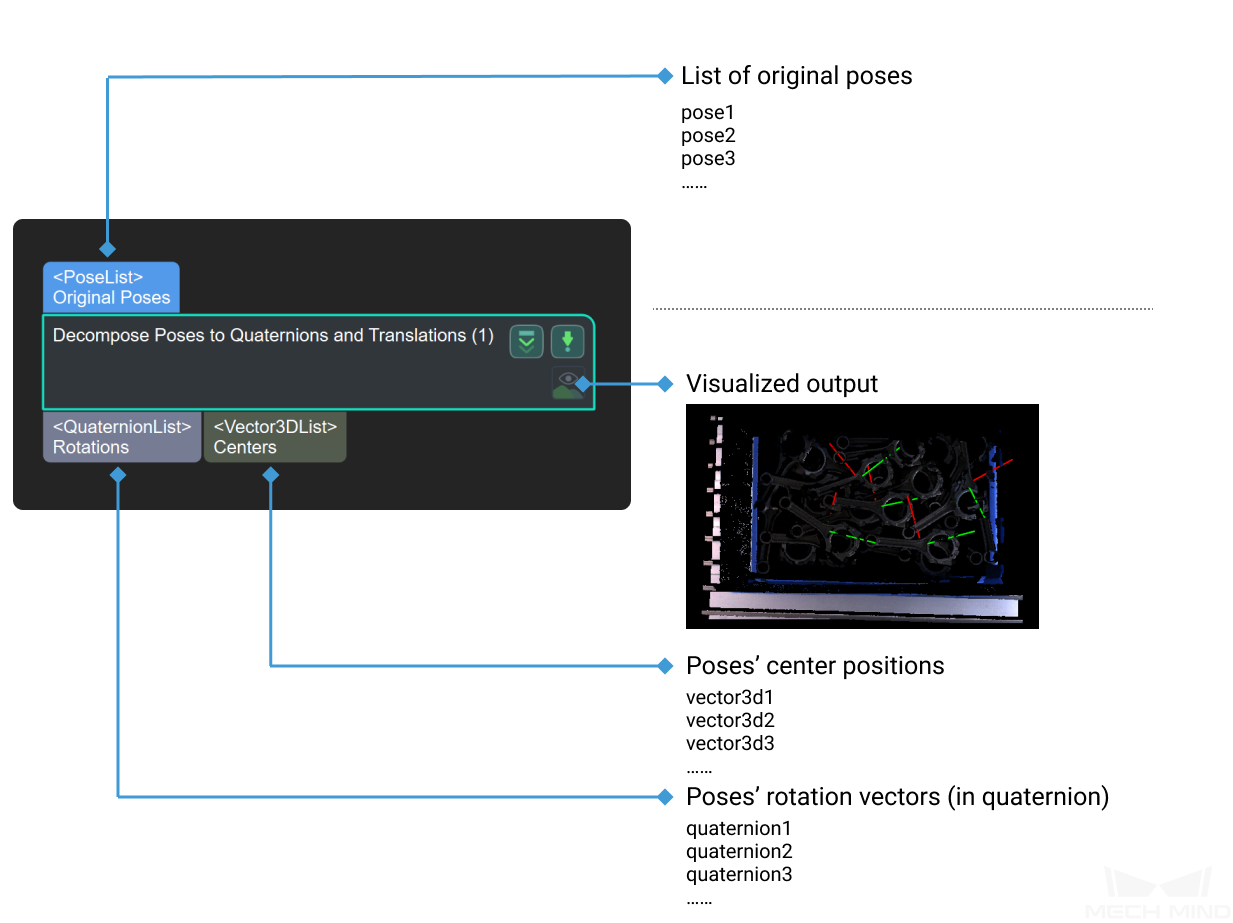
Decompose each input poses into a quaternion and a translation vector.
Usage Scenario¶
A general pose decomposition Step that provides data sources for subsequent Steps that require rotation vector and pose center data types.
Input and Output¶