Communication Configuration and Example Program Use¶
Mech-Center Standard Interface EtherNet IP¶
Mech-Center supports ETHERNET IP communication, as an adapter (the slave device), provides standard interface option ETHERNET IP, and performs data communication with the ETHERNET IP scanner (master device controller) through the EDS device description file.
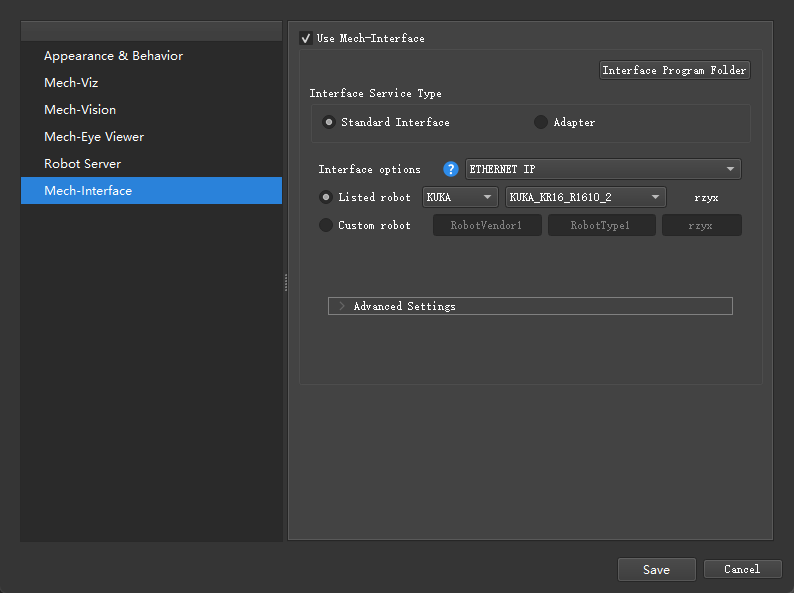
In the deployment settings of Mech-Center, the settings of the ETHERNET IP standard interface are as shown below.
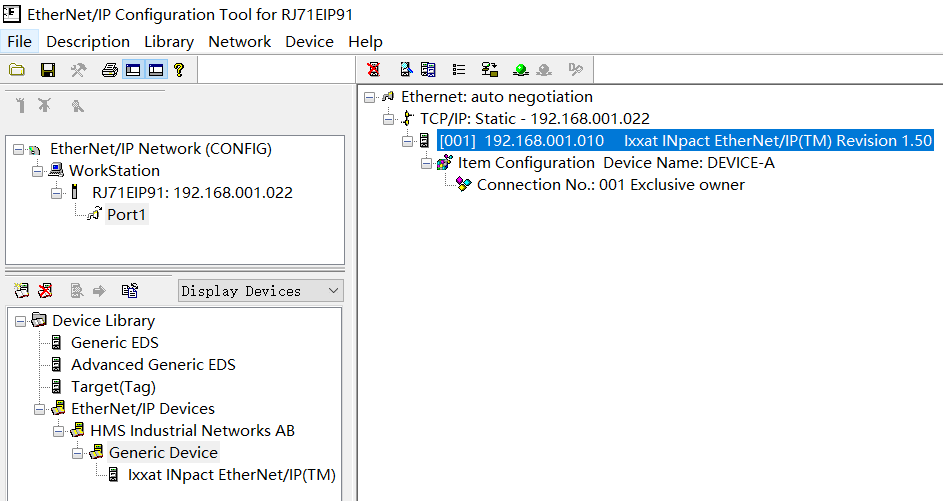
In the software Mitsubishi iQ-R series PLC GsX Works3, the EtherNet IP setting content of the adapter “Ixxat INpact EtherNet/IP(TM)” is as shown below.
Mech Mind–MITSUBISHI iQ-R Series PLC EtherNet IP Interface¶
The interface user library file “iQ-R_RJ71EIP91.usl” contains:
M_RJ71EIP91_Class1SetOutputData_00A: Gets the input data of the specified connection by Class1 communication
M_RJ71EIP91_Class1GetInputData_00A: Sets the output data of the specified connection by Class1 communication
CameraSignalsMove: Vision system signal transmission
CameraTest: Vision system test
MM_XXX_XXX function block, to implement the functions of various interface commands
File storage path: at the file location of Mech-Center in the Mech-Mind IPC or host.
…Mech-CenterRobot_InterfaceEthernetIPProgramming SamplesMITSUBISHI iQ-R PLC EthernetIP
Please copy the file to a computer with the software GX Works3 installed.