EtherNet/IP - KEYENCE PLC Setup Instructions¶
This section provides information on setting up communication between a KEYENCE PLC and Mech-Mind Software Suite via EtherNet/IP.
Overview¶
Hardware and Software Requirements¶
Hardware¶
KEYENCE PLC:
KV-8000 series
KV-8000A
KV-7500
KV-5500
Other models with a KV-EP21V or KV-NC1EP EtherNet/IP Unit
USB Type A Male to Type B Male cable
AC 220 V to DC 24 V power adapter
HMS IXXAT INpact EIP Slave PCIe interface card installed on the IPC in Mech-Mind Vision System
Switch
Ethernet cables
Attention
A KV-8000 model is used in the example below.
Software¶
KEYENCE PLC programming software KV STUDIO V11.41
Mech-Mind Software Suite: Mech-Center 1.5.1 or above, Mech-Vision 1.5.0 or above, and Mech-Viz 1.5.0 or above
VCI V4 (driver software for HMS IXXAT INpact 40 interface card)
Mech-Mind EDS file:
File name: 005A002B003A0100.EDS
Location: XXXX/Mech-Center-xxx/Robot_Interface/EthernetIP in the installation directory of Mech-Center
PLC routine files:
CameraSignalsMove.mod (used to send signals of the vision system)
CameraTest.mod (used for testing of the vision system)
MM_XXX_XXX.kfb (used to execute commands with different functions of the standard interface)
The files are stored in XXXX/Mech-Center-xxx/Robot_Interface/EthernetIP/Programming Samples/Keyence KV-8000 PLC EthernetIP in the installation directory of Mech-Center. Please copy and paste all files to the computer with KV STUDIO installed.
Note
Connect the Mech-Mind Vision System IPC, computer with KV STUDIO installed, and PLC to the same router.
Configure IPC and Initiate Communication¶
Check PCI-e Card and Driver Software¶
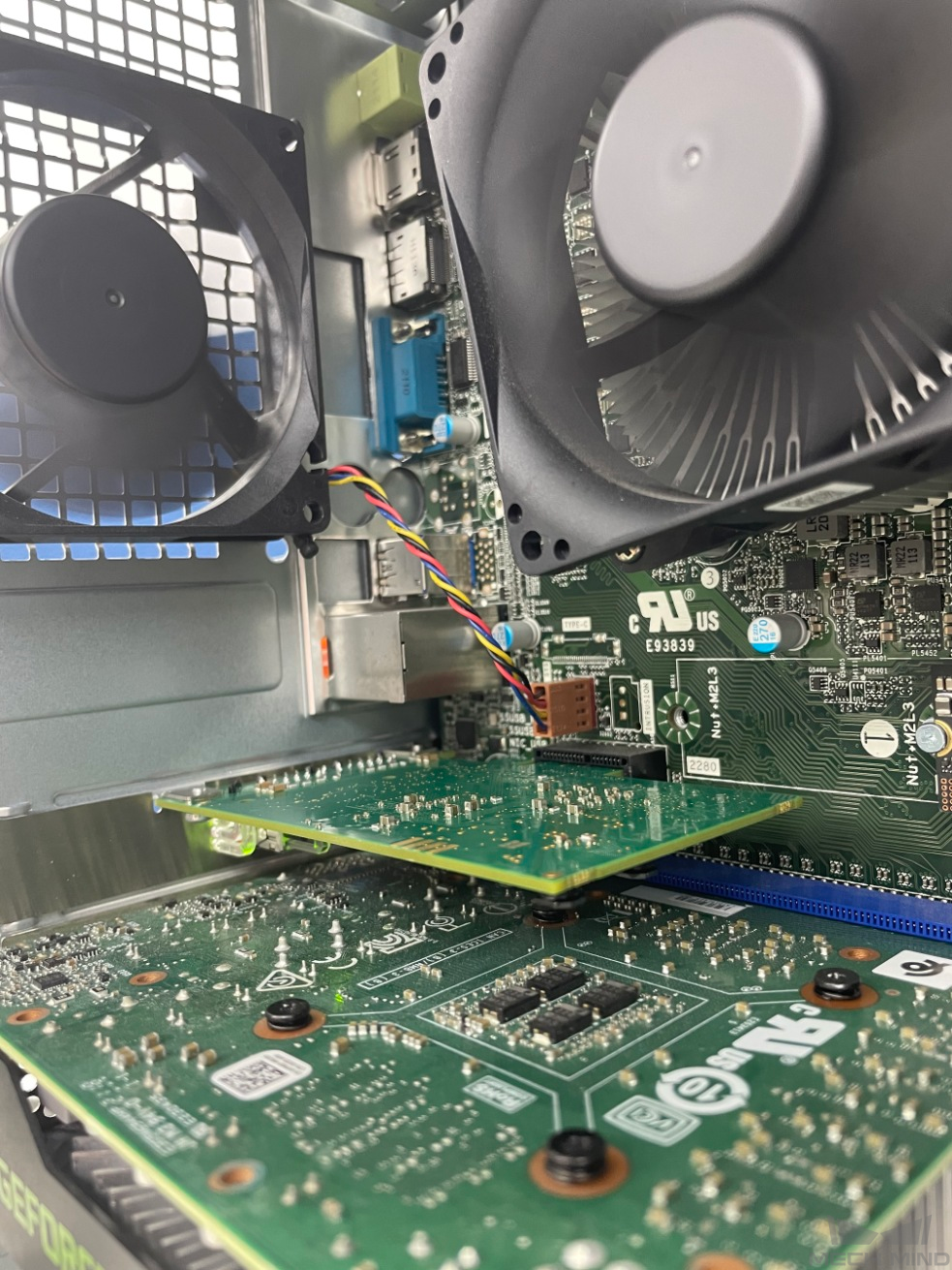
Please make sure that the INpact EIP Slave PCIe interface card has been pressed into the PCI-e slot of the IPC, as shown below.
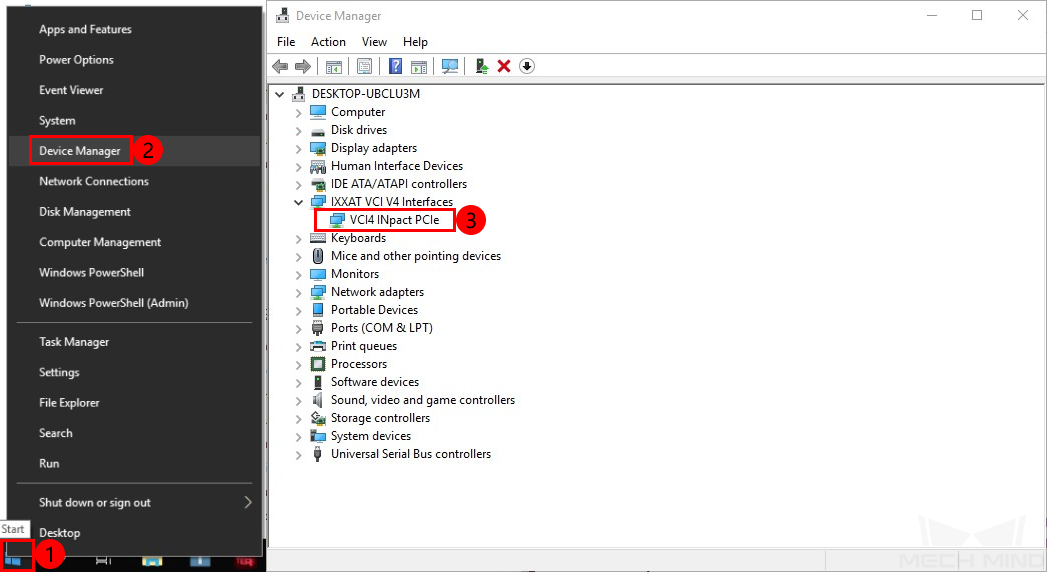
Start the IPC, go to and check if the driver software VCI4 INpact PCIe has been installed.
Configure Mech-Interface in Mech-Center¶
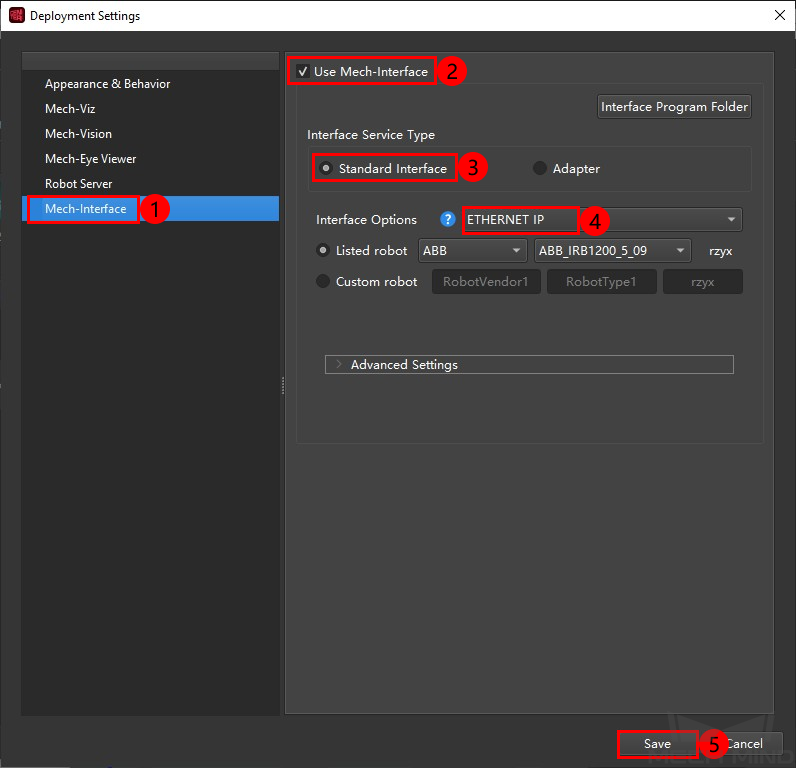
Open Mech-Center, and click on Deployment Settings.
Go to Mech-Interface, check Use Mech-Interface and select . Click on Save to complete configurations.
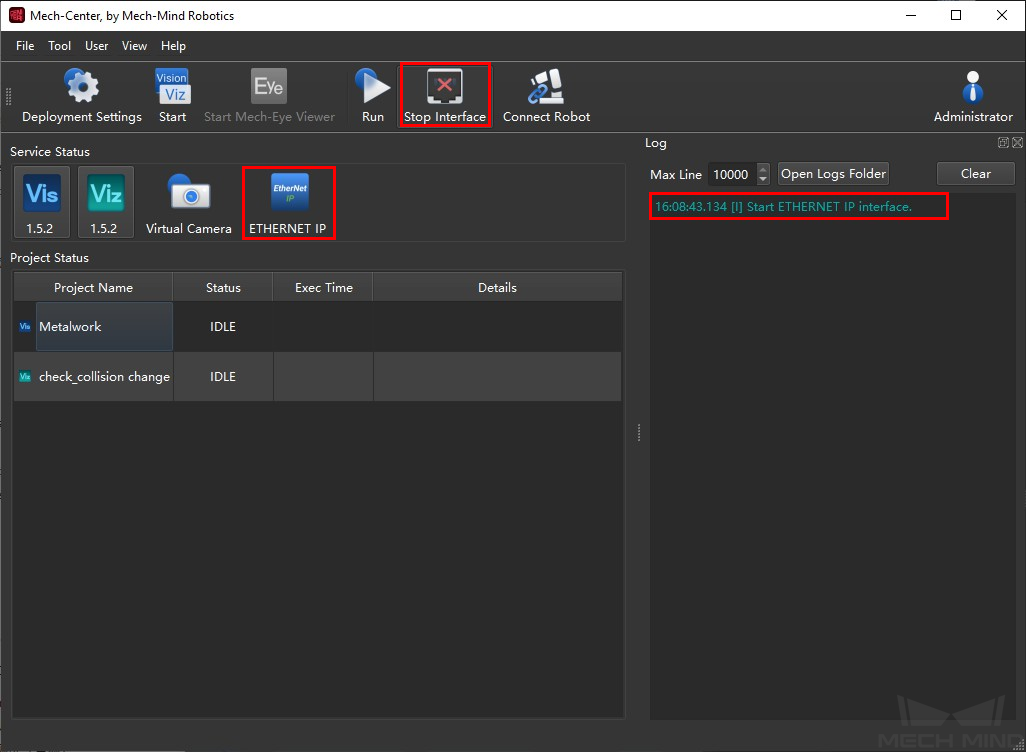
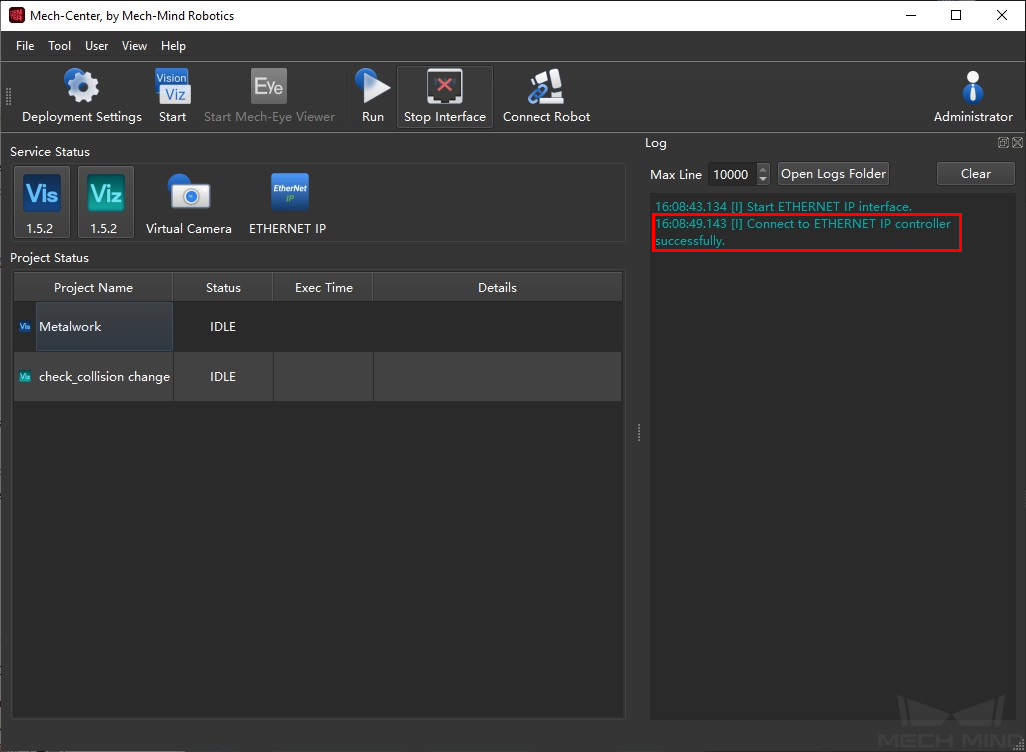
Click on Start Interface in the Toolbar. Then an ETHERNET IP icon will display in the service status bar, and the message “Start ETHERNET IP interface” will appear in the log panel.
Configure IP address of the PCI-e Card¶
Download and install HMS IPconfig software on the IPC first. Use an Ethernet cable to connect the network ports of the IPC and the INpact EIP Slave PCIe.
Attention
After configurating the IP and initiating communication successfully, the Ethernet cable used here can be removed.
Open HMS IPconfig, click on
 and select Ixxat INpact EtherNet/IP(TM). Then uncheck Retrieve IP settings dynamically from a DHCP server and enter the IP address and subnet mask, as shown below. After configuration, click on Apply.
and select Ixxat INpact EtherNet/IP(TM). Then uncheck Retrieve IP settings dynamically from a DHCP server and enter the IP address and subnet mask, as shown below. After configuration, click on Apply.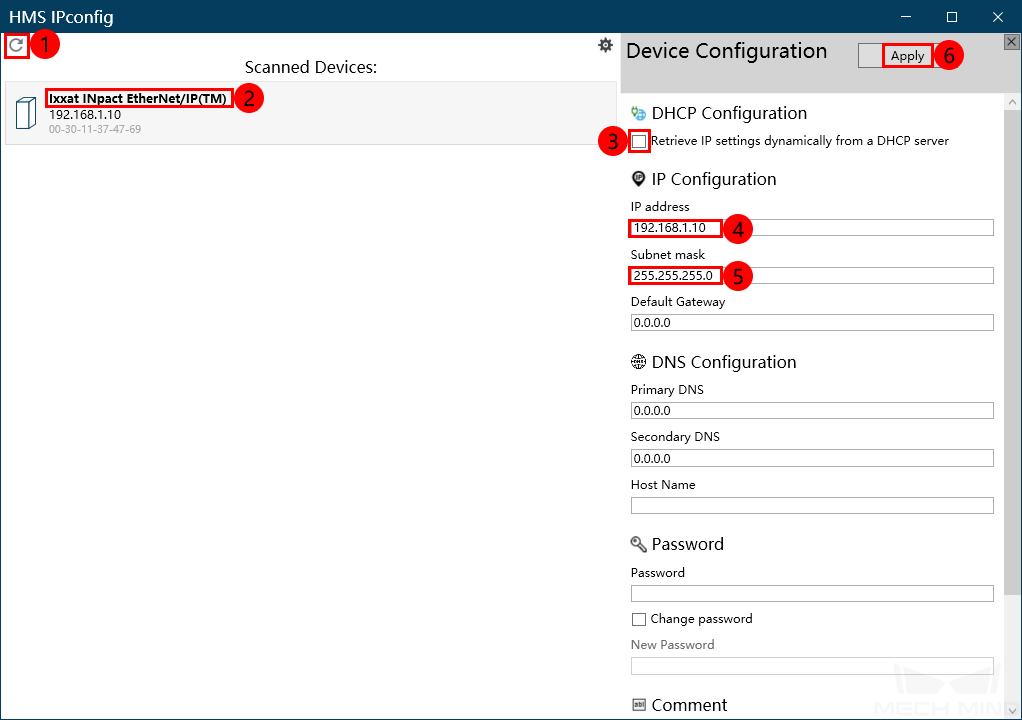
Attention
The IP address should be the same as which is configured in the PLC.
Install EDS file and Configure Communication¶
Create PLC Project¶
Open KV STUDIO, click on
 , select the PLC model according to the model in use, and name the project. Then click on Refer to select a location to store the project, and click on OK to save settings.
, select the PLC model according to the model in use, and name the project. Then click on Refer to select a location to store the project, and click on OK to save settings.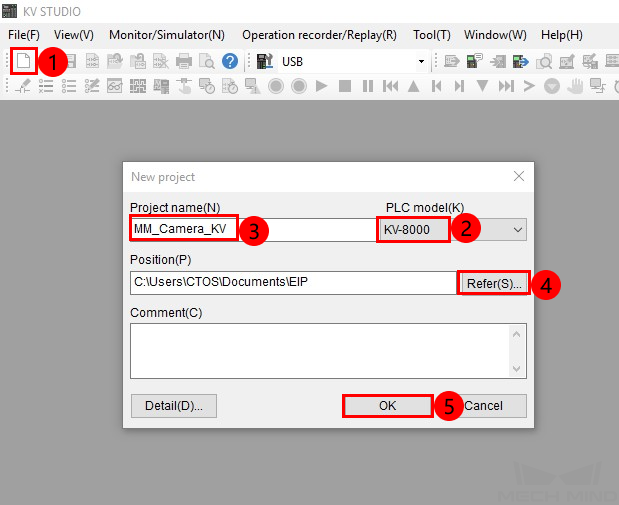
If the message “Automatically set the operation recorder setting?” pops up, select Yes.
If the message “Setup unit setting info now?” pops up, select No.
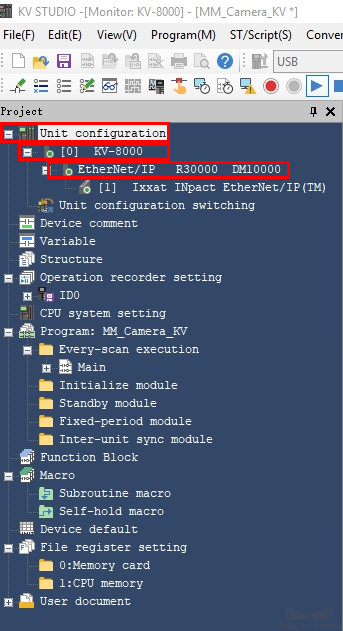
Go to , double click on EtherNet/IP R30000 DM10000.
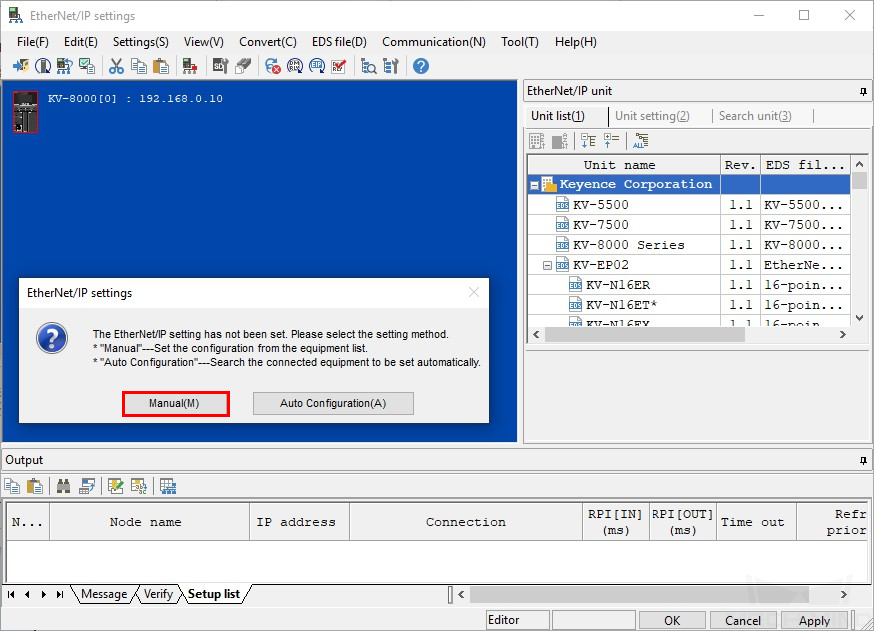
An EtherNet/IP settings window will appear as shown below. Select Manual in the pop-up window.
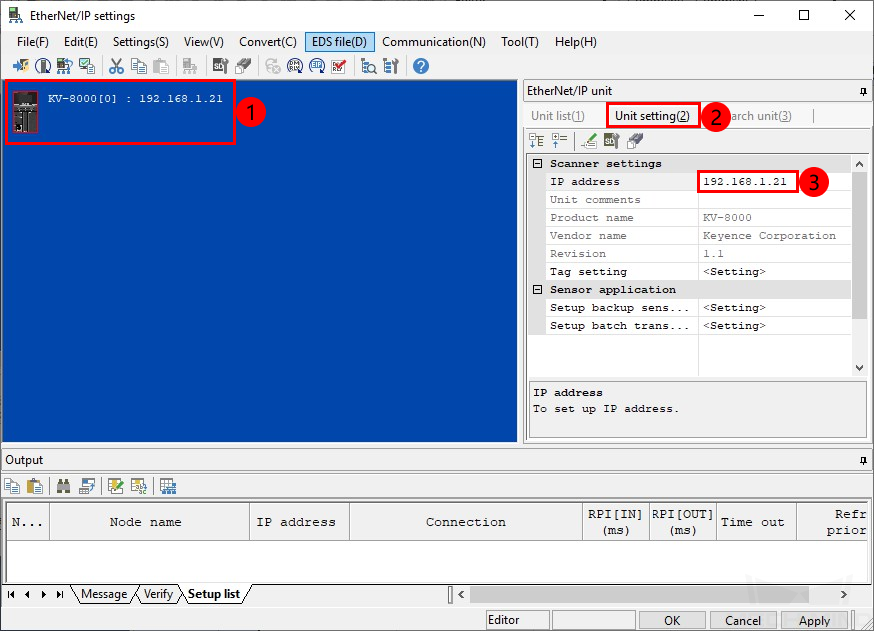
Select KV-8000, click on Unit setting and then set the IP address of the PLC.
Install EDS File and Configure Network¶
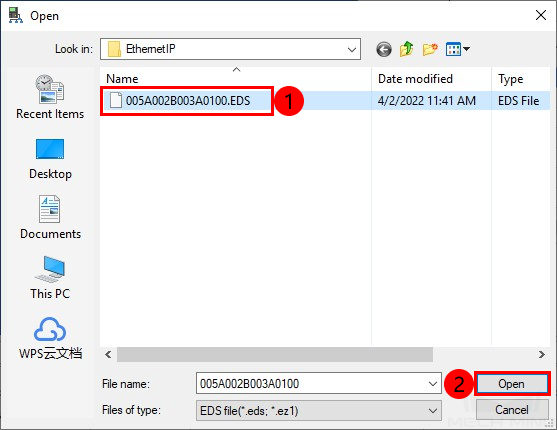
Click on EDS file in the EtherNet/IP settings window, and select Reg. An Open window will pop up.

Locate and select the EDS file and click on Open.
Attention
The EDS file is stored in the folder where Mech-Center is installed. The default path is XXXX/Mech-Center-xxx/Robot_Interface/EthernetIP. If KV STUDIO is not installed on the same IPC where Mech-Center is installed, you can copy and paste the EthernetIP folder to the PC with KV STUDIO installed.
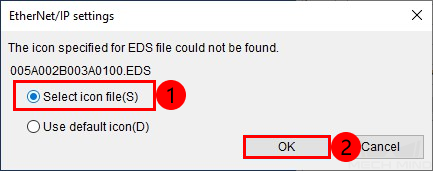
If the message “The icon specified for EDS file could not be found.” pops up, select Select icon files and then click on OK.
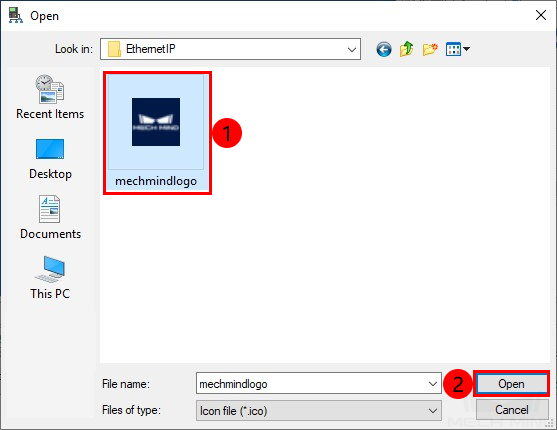
After selecting the icon files, click on Open.
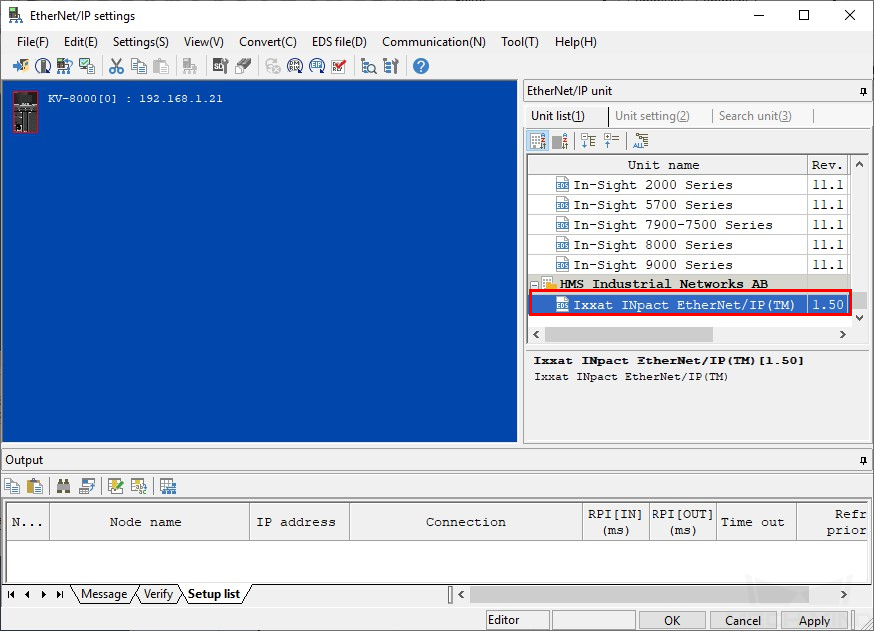
If the EDS file is registered successfully, Ixxat INpact EtherNet/IP(TM) will appear in the Unit list. Double click it to connect to the EtherNet/IP network.
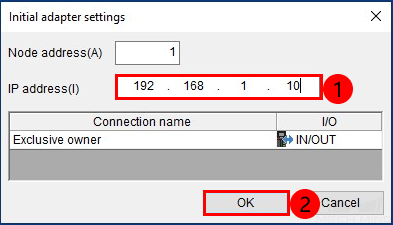
Set the IP address in the Initial adapter settings window, set the IP address of the IPC as same as which is set in HMS IPconfig, and then click on OK.
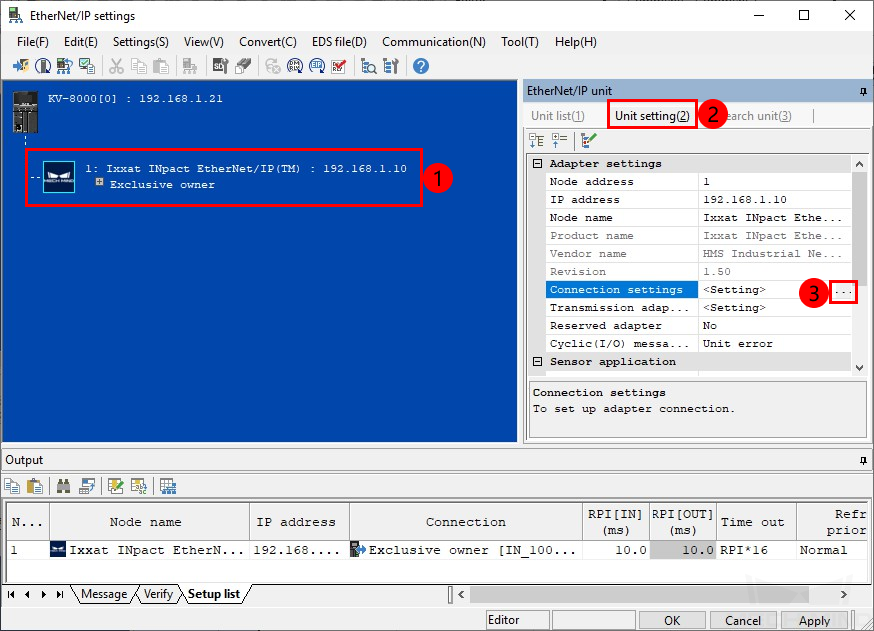
Select Ixxat INpact EtherNet/IP(TM), click on Unit setting(2) and then click on .. next to Connection settings.
Now you can see a Connection settings window. Click on Assign device and then assign the IN and OUT manually, as shown below. Go back to the EtherNet/IP settings window after assigning.
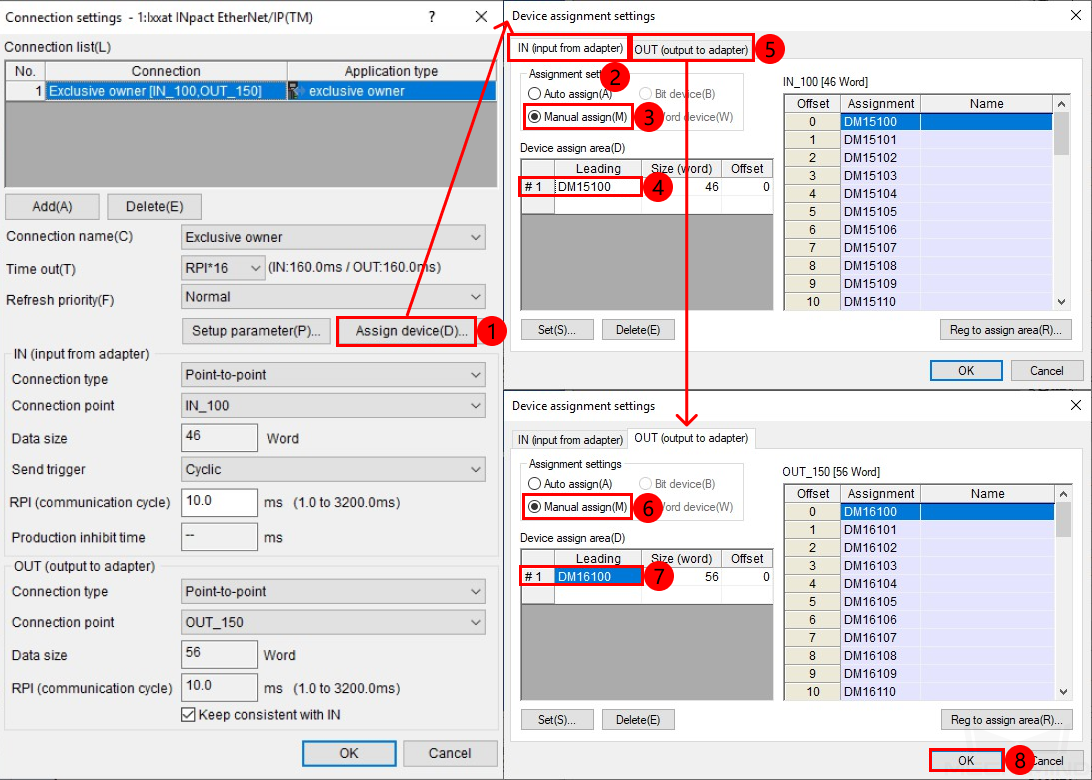
Note
The Input and Output in the figure are applicable to this example only.
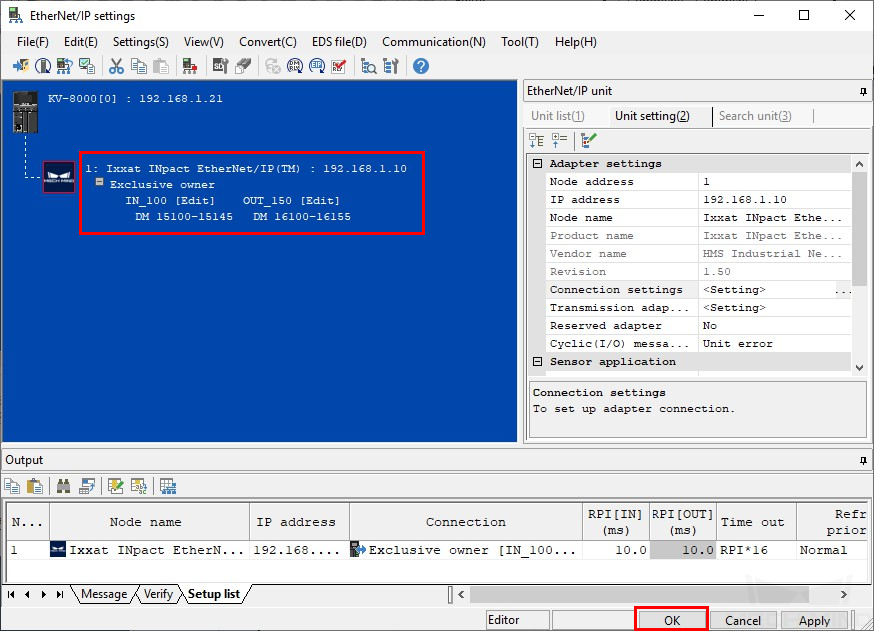
Now the information of the server appear in the EtherNet/IP settings window. Click on OK.
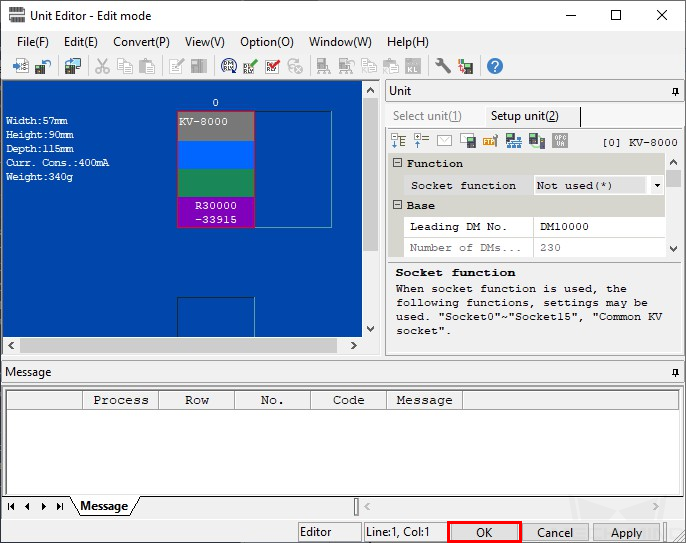
Click on OK in the Unit Editor window.
Download Hardware Configuration to PLC¶
Go back to the main interface of KV STUDIO, click on
 button in the menu bar.
button in the menu bar.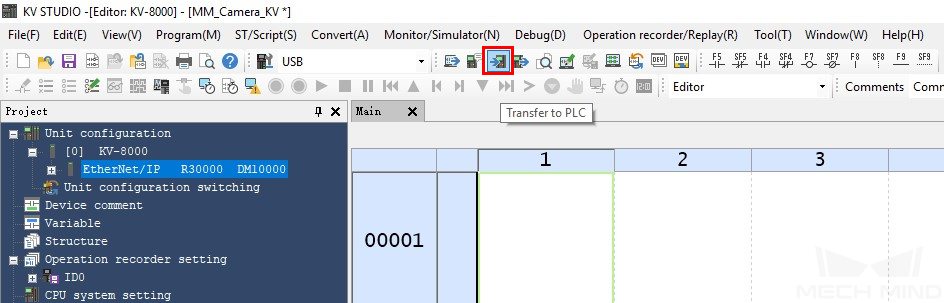
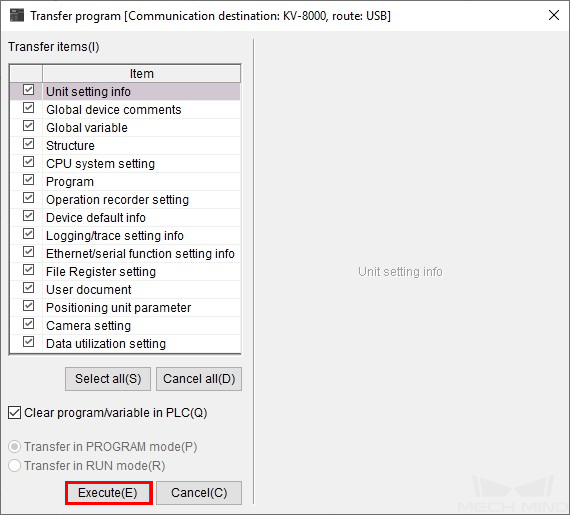
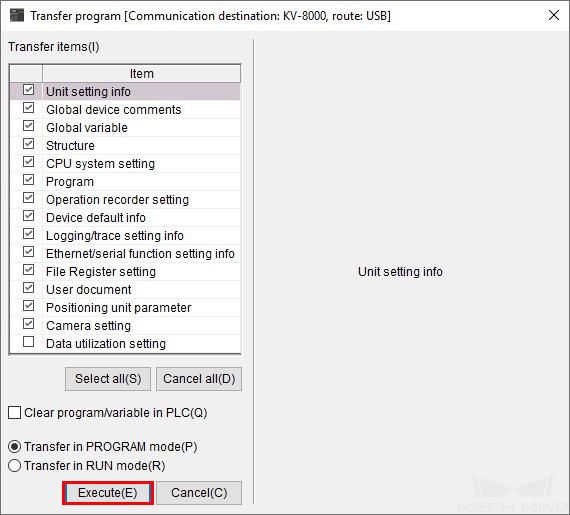
Keep the default settings, and click on Execute in the Transfer program window.
Select Yes in the pop-up window showing the message “Change to PROGRAM mode and overwrite?”.
Select Yes in the pop-up window showing the message “Change to RUN mode?”.
Check Communication¶
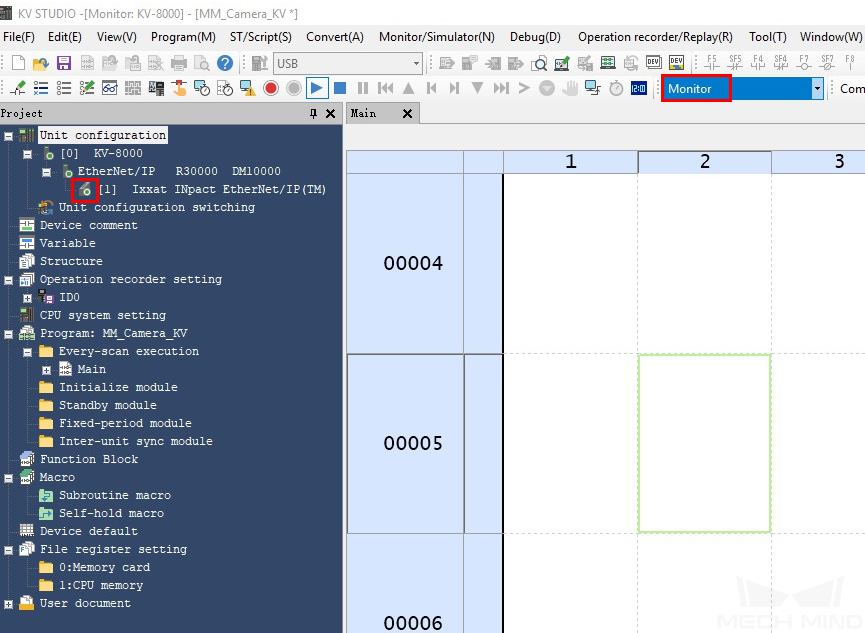
If the PLC is connected successfully, the status of Ixxat INpact EtherNet/IP(TM) will be displayed as online in Monitor mode.
The PLC is successfully connected to Mech-Center if the following message is displayed in Mech-Center Log panel:
Connect to ETHERNET IP controller successfully
Note
If you don’t see this log message, please check if:
The hardware are properly connected;
If Mech-Interface has been started by clicking on Start Interface in the Toolbar;
If the hardware configuration has been downloaded to the PLC.
Import Example Program and Download to PLC¶
Note
Before you add the example program to a project already in use, it is recommended to import it to a new project and test it first. In the following steps, the project created earlier is used to import and test the example program.
Import Example Program Files¶
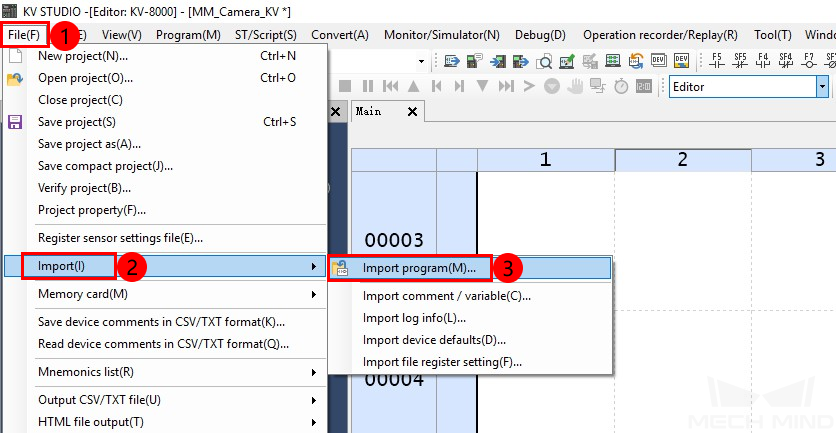
In the main interface of KV STUDIO, go to .
In the pop-up Import program window, select the CameraSignalsMove.mod, CameraTest.mod, and MM_XXX_XXX.kfb files, and then click on Open.
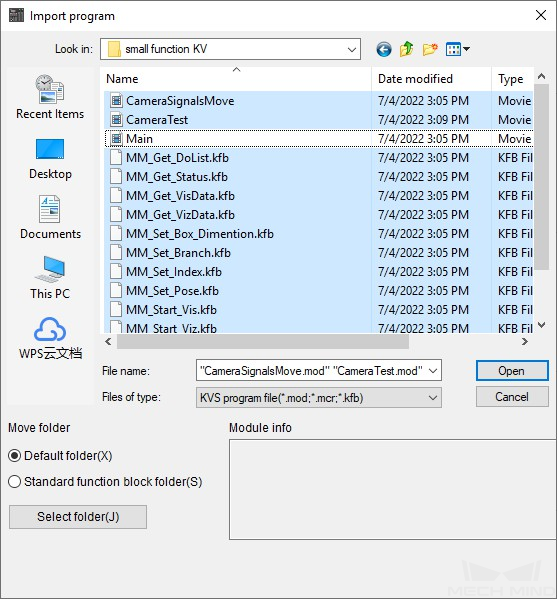
Click on OK in the Import completed window.
Download PLC Program¶
Go back to the main interface of KV STUDIO, click on
 button.
button.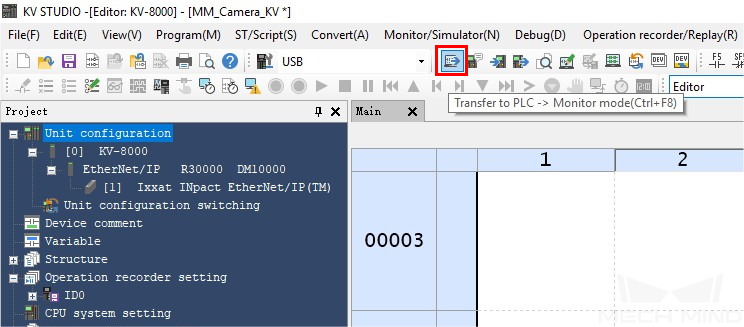
Keep the default settings, and click on Execute in the Transfer program window.
Select Yes in the pop-up window showing the message “Change to PROGRAM mode and overwrite?”.
Select Yes in the pop-up window showing the message “Change to RUN mode?”.
Test with Mech-Vision/Mech-Viz Project¶
This section provides the introduction on how to run the Mech-Vision/Mech-Viz project and obtain data from the project by using the function blocks. For detailed information on the I/O units, please refer to EtherNet/IP - Keyence PLC Commands.
Prerequisites¶
Mech-Vision project(s):
Executable
Set to autoload
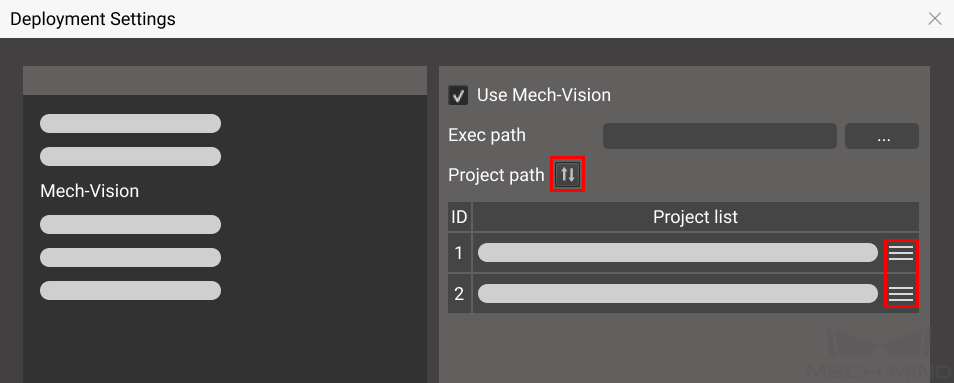
The Project list in is synced by clicking on
 , and the order of Mech-Vision projects have been adjusted according to actual needs.
, and the order of Mech-Vision projects have been adjusted according to actual needs.
Mech-Viz project:
Executable
Set to autoload
Contains a branch_by_msg Task that has been renamed to 1.
Run Mech-Vision Project and Obtain Vision Points¶
Parameter Settings¶
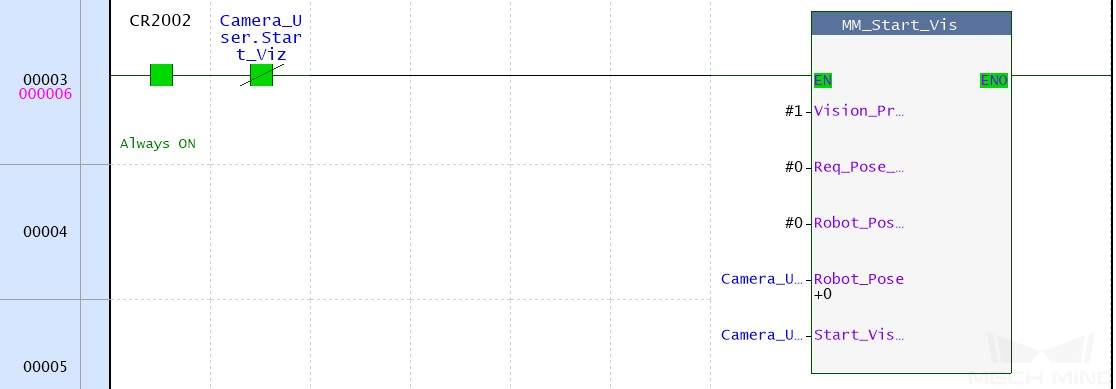
Go back to main interface of KV STUDIO, go to , double click on CameraTest, and set the status of ToCamera.COM_ENABLE to be Always ON

Set the Mech-Vision project ID the same as the one set in Deployment Settings in Mech-Center. Set the value of VISION_PROJ_NUM to 1, and then Mech-Vision project No. 1 in the Project list of Mech-Center will be started.
Set the number of vision points to be sent by Mech-Vision. The default value of REQ_POSE_NUM is 0, which means the Mech-Vision project will send all the vision points.
Start Mech-Vision Project¶
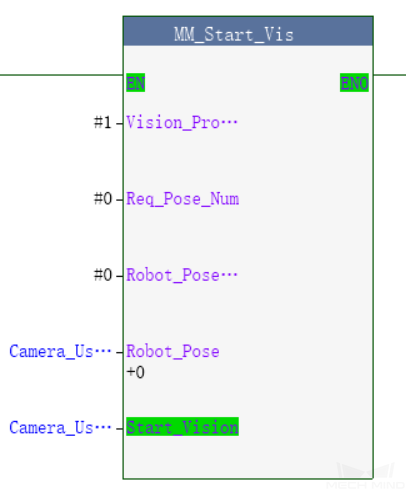
Go back to main interface of KV STUDIO, go to and double click on CameraTest. Double click on the input variable Start_Vision of the FB MM_Start_Vis to set the value to 1 and therefore start Mech-Vision project. Then double click on the variable again to reset the value to 0.
Click on
 button, locate FromCamera.STATUS_CODE in the Device column, and then check its current value. 1102 represents that the Mech-Vision project was started successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error.
button, locate FromCamera.STATUS_CODE in the Device column, and then check its current value. 1102 represents that the Mech-Vision project was started successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error.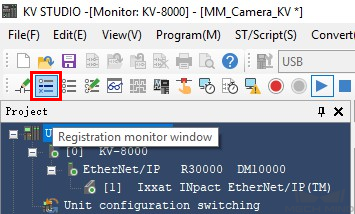

Obtain Vision Points from Mech-Vision¶
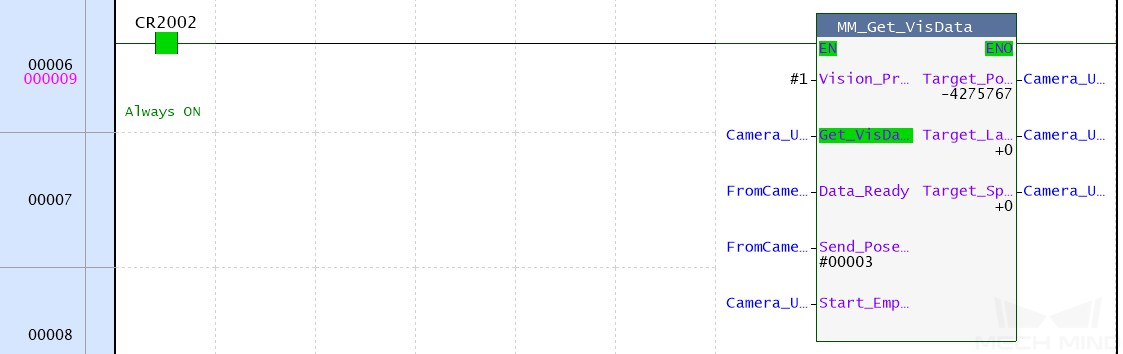
After the status code 1102 is returned, double click on the input variable Get_VisData of the FB MM_Get_VisData to set the value to 1 and therefore obtain vision points from Mech-Vision. Then double click the variable again to reset the value to 0. The result is shown below. The value of SendPoseNum is 3, which means 3 vision points are obtained from Mech-Vision.
Check the current value of FromCamera.STATUS_CODE in the Registration monitor window. 1100 represents that the vision points were obtained successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error.

Run Mech-Viz Project and Obtain Planned Path¶
Parameter Settings¶
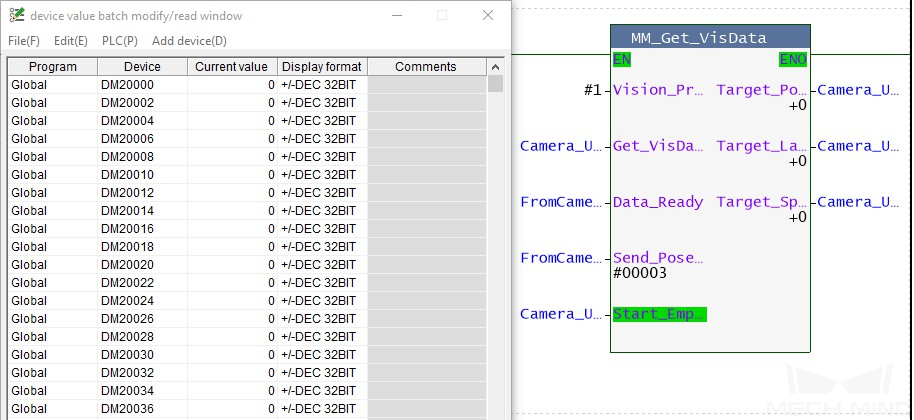
Double click on the input variable Start_Empty of the FB MM_Get_VisData to set the value to 1. Then double click on the variable again to reset the value to 0.
Hint
Open the device value batch modify/read window, and go to to check if the previously obtained vision data has been cleared successfully.
Set the value of BranchName and BranchPort to 1 respectively, the Mech-Viz project will proceed along exit port 1 of Task 1.
Set the value of REQ_POSE_TYPE to 1. This asks Mech-Viz to send joint positions (instead of TCP data).
Start Mech-Viz Project¶
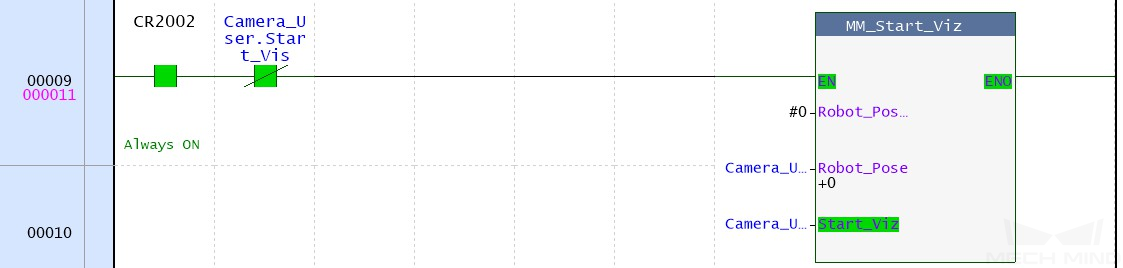
Double click on the input variable Start_Viz of the FB MM_Start_Viz to set the value to 1 and therefore start Mech-Viz project. Then double click on the variable again to reset it to 0.
Check the current value of FromCamera.STATUS_CODE in the Registration monitor window. 2103 represents that the Mech-Viz project was started successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error.

Select Branch in the Mech-Viz Project¶
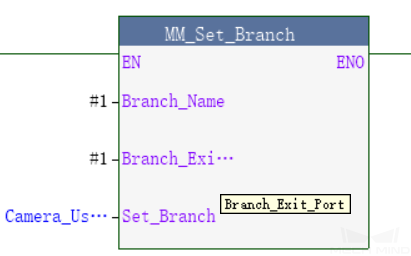
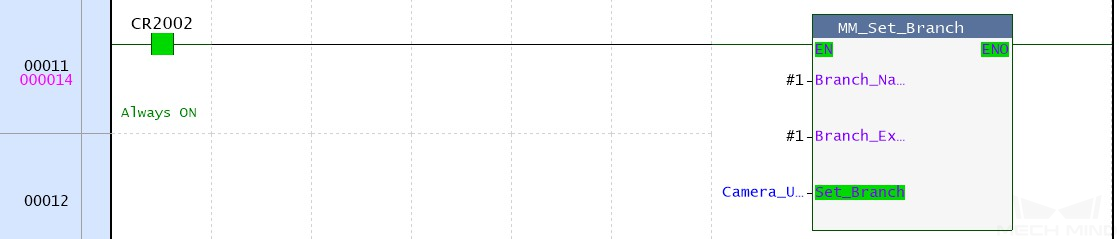
Double click on the input variable Set_Branch of the FB MM_Set_Branch to set the value to 1 and therefore select branch in the Mech-Viz project. Then double click on the variable again to reset it to 0.
Check the current value of FromCamera.STATUS_CODE in the Registration monitor window. 2105 represents that the branch was selected successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error.

Obtain Planned Path¶
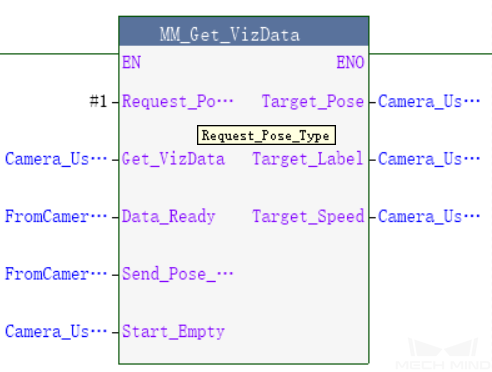
Double click on the input variable Get_VizData of the FB MM_Get_VizData to set the value to 1 and therefore obtain planned path from Mech-Viz project. Then double click on the variable again to reset it to 0.
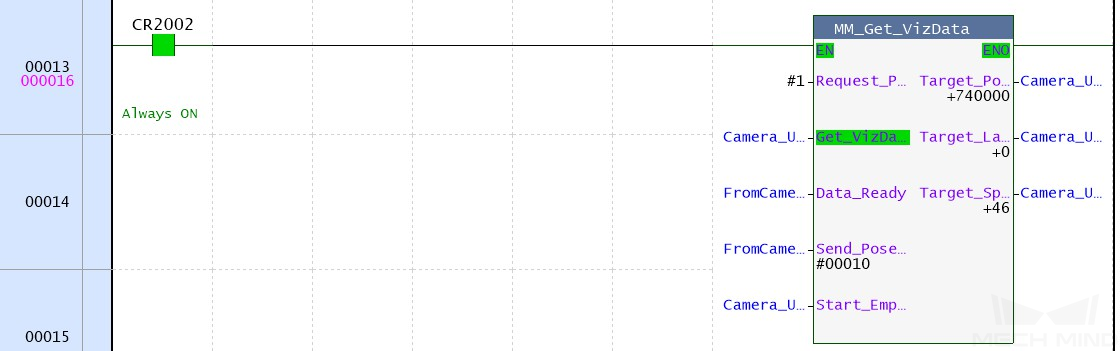
Check the current value of FromCamera.STATUS_CODE in the Registration monitor window. 2100 represents that planned path was obtained successfully. For other values, please refer to Status Codes and Trouble Shooting for the corresponding error. The result is shown in the above figure. The value of SendPoseNum is 10, which means that 10 robot poses in JPs have been obtained, and the JPs are stored in TargetPose.
