Tending Neatly Arranged Crankshafts¶
Background¶
Workpiece¶
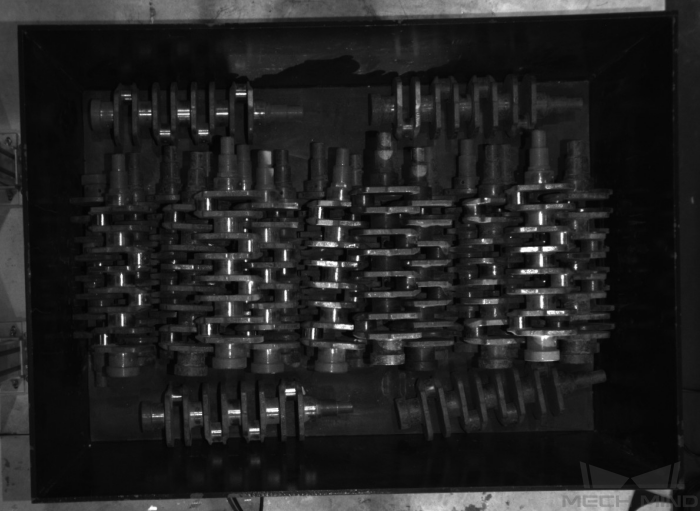
The objects to be recognized and picked in this case are crankshafts, which are heavy workpieces with complex curved features and non-reflective surface. In this case, the crankshafts are neatly arranged in the bin and the crankshafts on the same layer do not overlap with each other. The features of the workpieces’ edges are obvious, which facilitates the recognition.
Robot¶
A Kawasaki RS007L 6-axis robot is used in this case. The payload of the robot is 7Kg.
Project Objective¶
The vision system should guide the robot to pick the workpieces layer by layer, one at a time. Then, the robot should place the workpieces to specified positions. The following technical requirements should be met.
Picking accuracy: plus-minus 0.5~3mm
Recognition success rate: 99~99.99%
Takt time: 4s
Bin clearance rate: above 99%
Work Program¶
Camera¶
In this case, since the sizes of the workpieces and bin are large, and a high picking accuracy is required, a Mech-Eye LSR L or PRO M camera is recommended to be used. The camera can be mounted on the camera stand in the Eye to Hand mode.
Communication¶
The master-control communication is used to establish communication between Mech-Mind Vision System and the robot, and Mech-Viz will guide the robot to pick and place crackshafts.
Vision Solution¶
Mech-Vision will trigger the camera to capture images, and then process the images and output pick points, which will be later used by Mech-Viz in path planning and collision detection.
Deployment¶
Construct the Vision System and Connect with the Robot¶
Before deploying the project, you should construct the vision system and connect it with the robot.
Please refer to the following chapters for detailed information:
Complete the Robot Hand-Eye Calibration¶
Please refer to Calibration Procedure for ETH Calibration Using the Multiple Random Board Poses Method to complete the robot hand-eye calibration.
Build the Mech-Vision Project¶
Both a Mech-Vision project and a Mech-Viz project are needed to achieve the objective in this case. Firstly, you should build a Mech-Vision project to capture images, process images, output pick points, etc. Because the features of the workpieces’ edges are obvious, a high recognition accuracy can be achieved by using the point cloud model in the Mech-Vision project.
Please refer to Build the Mech-Vision Project for detailed information.
Build the Mech-Viz Project¶
According to the scene point clouds of the scene from Mech-Vision, you can create a workflow in Mech-Viz to plan the path and detect collisions and therefore guide the robot to pick the crankshafts. The Mech-Viz project should ensure that there are no collisions with the scene objects, camera, and bin when the robot takes the planned path to pick objects.
Please refer to Build the Mech-Viz Project for detailed information.