HALCON——连接相机、调节参数、采集图像¶
本章介绍使用 HALCON 例程连接 Mech-Eye 工业级 3D 相机、调节参数并采集图像。HALCON 软件支持通过 GigE Vision2 协议与相机进行连接。本章主要内容包含:
使用前提¶
-
提示
Nano 和 Pro XS 相机推荐与工控机直接连接,不使用交换机。
工控机上已安装 HALCON 20.11 或以上。
提示
低于 20.11 版本的 HAlCON 未经完全验证。
工控机上已安装 Mech-Eye SDK 2.0.0 或以上。
提示
相机固件版本与软件版本一致时,才可使用 Mech-Eye SDK。如需升级固件版本,请参考 升级相机固件。
相机与工控机 IP 地址在同一网段。
提示
建议将相机与工控机设置为静态 IP 地址,IP 地址设置请参考 使用 Mech-Eye Viewer 设置 IP 地址 。
安装 HALCON 软件后,您可以通过以下方式连接相机。
使用 HALCON 助手¶
使用 HALCON 中的图像采集助手可快速连接相机、采集图像和调节参数。
在工控机上运行 HALCON 软件,选择 ,即可打开图像采集助手。
连接相机¶
在助手窗口的 资源 选项卡中, 选择 图像获取接口 , 并从下拉菜单中选择 GigEVision2 。
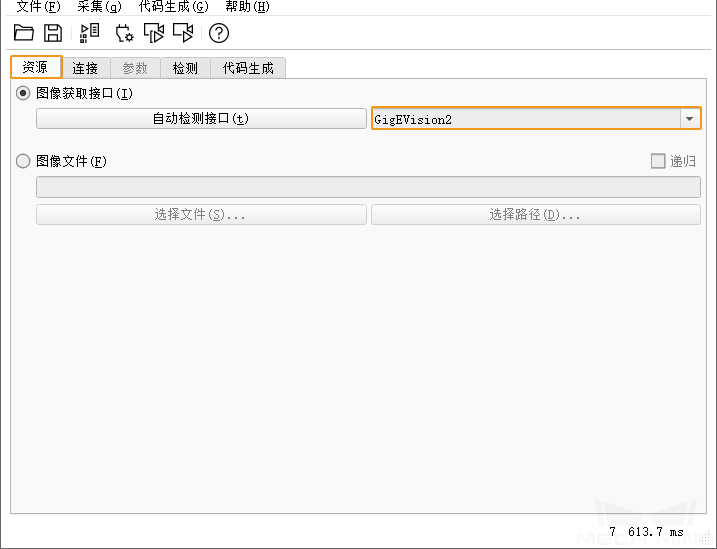
提示
如下拉菜单中无 GigEVision2 选项,表明 GigEVision2 图像获取接口未安装。请参考 HALCON 的 安装指南 ,通过 MVTec 软件管理器(SOM)安装接口。
在 连接 选项卡中,选择 设备 ,单击 连接 可连接相机。
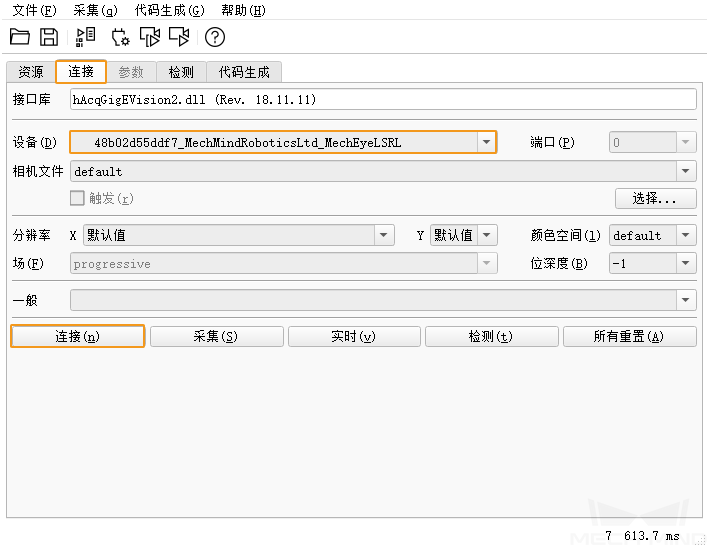
提示
相机连接成功,连接 按钮变为 断开 ;如无变化,则为连接失败。如需断开与相机的连接,在 连接 选项卡中单击 断开 按钮。
如相机已被连接,则连接一定不成功。请检查相机是否被其他客户端连接,相机断开连接后,再使用 HALCON 连接。
设备 中的相机显示名称较长,可使用 Mech-Eye Viewer 连接相机后, 自定义相机显示名称 ,便于查找需要连接的相机。推荐设置为英语名称。
采集图像¶
相机连接后,在 连接 选项卡中单击 采集 即可进行单次图像采集。
注解
如相机采图时间较长,工控机可以 开启巨型帧功能 。
您也可以进行多次或连续图像采集,为此需先调节 AcquisitionMode 参数的值。
进行多次图像采集:
切换至 参数 选项卡,将 AcquisitionMode 参数设置为 MultiFrame 。
单击右上角的 刷新 后,在 AcquisitionFrameCount 中设置需进行的图像采集次数。
切换至 连接 选项卡,单击 实时 进行图像采集。
设定次数的图像采集完成后,实时 按钮变为 停止 。单击 停止 停止图像采集。
进行连续图像采集:
切换至 参数 选项卡,将 AcquisitionMode 参数设置为 Continuous 。
切换至 连接 选项卡,单击 实时 进行图像采集。
实时 按钮变为 停止 。单击 停止 停止图像采集。
注解
AcquisitionMode 参数设置为 MultiFrame 或 Continuous 时,仍可单击 采集 进行单次图像采集。
AcquisitionMode 参数设置为 SingleFrame 时,只可进行单次图像采集。
选择数据类型¶
相机连接后,默认采集的数据类型是 2D 图。您可通过调节 DeviceScanType 参数选择要获取的数据类型(2D 图或深度图)。
单击 参数 选项卡,将 DeviceScanType 参数设置为需要的数据类型。数据类型说明如下:
值
数据类型
Areascan
2D 图
Areascan3D
深度图(包含深度信息的 2D 图)
进行图像采集,获取所选的数据类型。
提示
勾选 参数 选项卡右上角的 更新图像,调节参数后 Canvas 窗口中的图像将自动更新。
设置采集区域¶
相机连接后,如需对获取的图像进行裁剪,可通过调整 Height、 Width、 OffsetX 和 OffsetY 四个参数设置采集区域。
请按照如下步骤设置采集区域:
选择需要设置采集区域的数据类型。
单击 采集 进行单次图像采集,确认当前图像。
切换至 参数 选项卡,调节 Height、 Width、 OffsetX 和 OffsetY 参数。下图展示这四个参数及其所定义的采集区域(橙色方框)与原始图像的关系。
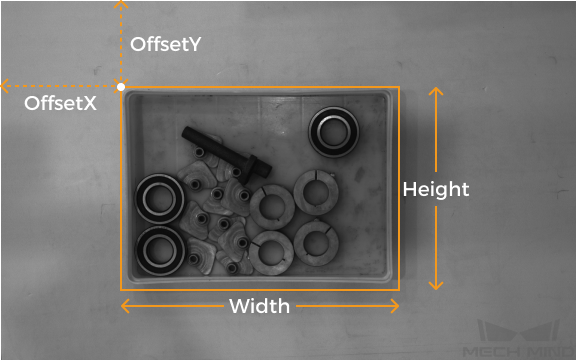
Width : 采集区域宽度
Height :采集区域高度
OffsetX :采集区域左上角的 x 坐标(原始图像左上角坐标为 (0, 0) )
OffsetY :采集区域左上角的 y 坐标
注解
以上四个参数的设置需满足如下要求:
(Width + OffsetX)不超过原始图像的宽度
(Height + OffsetY)不超过原始图像的高度
原始图像的宽度和高度可在 只读参数 的 WidthMax 和 HeightMax 中查看(需将 可视度 设为 专家 或以上)。
再次进行图像采集,确认裁剪结果。
提示
勾选 参数 选项卡右上角的 更新图像,调节参数后 Canvas 窗口中的图像将自动更新。
切换至 代码生成 选项卡,单击 插入代码 生成相应的代码。
如需为另一数据类型设置采集区域:
在当前助手窗口中断开相机连接。
打开一个新的助手窗口并连接相机。
选择另一数据类型并重复上述步骤。
注解
上述四个采集区域参数不会被保存至参数组中。如相机断电,其参数值将被重置。如需记录其参数值,请生成并保存代码。
更改 DeviceScanType 和 Scan3DBinningEnable 参数也将重置上述采集区域参数的值。
采集区域与 Scan3DROI 的区别¶
Mech-Eye 工业级 3D 相机还提供了另外一组用于设置感兴趣区域的参数: Scan3DROILeft、 Scan3DROITop、 Scan3DROIHeight 和 Scan3DROIWidth (统称为“Scan3DROI”)。
采集区域参数和 Scan3DROI 的区别如下表。请根据需求选择要使用的参数。
采集区域 |
Scan3DROI |
不可保存至参数组,相机断电将重置参数值 |
可保存至参数组 |
2D 图和深度图均可设置 |
2D 图不可设置 |
对图像进行裁剪 |
不对图像进行裁剪 |
只可在HALCON中设置 |
调节参数¶
如获取的数据不满足需求,可调节相应参数。
提示
相机支持参数组功能,通过切换参数组可以快速切换相机的参数配置。相机参数需要在指定的参数组下设置。
如果需要增加或删除参数组,请通过 Mech-Eye Viewer 配置。使用 Mech-Eye Viewer 配置完参数组后,在 HALCON 参数 选项卡下,单击右上角的 刷新 按钮读取相机最新配置。
执行如下步骤调节参数:
相机连接后,单击 参数 选项卡,将 UserSetSelector 参数设置为要修改的参数组。

找到 UserSetLoad 参数,单击右侧的 应用 读取配置。
注解
如单击 应用 后,各参数的值未更新,请再次单击。
找到需要修改的参数,并修改参数值。
找到 UserSetSave 参数,单击右侧的 应用 保存配置。
切换至 代码生成 选项卡,单击 插入代码 生成相应的代码。
参考信息:
关于 GenICam 支持的相机参数的描述和解释,请下载和查阅 GenICam 参数说明。
GenICam 支持的相机参数 与 Mech-Eye Viewer 提供的参数基本上一一对应。关于参数的对应关系,请参见 GenICam 支持的相机参数 。
设置 自动曝光感兴趣区域、 深度设置 及 感兴趣区域 等相机参数时,通常需要借助可视化工具进行不断调整从而获取理想的值。由于 HALCON 并未提供辅助参数设置的可视化工具,您可以借助 Mech-Eye Viewer 的可视化设置工具来设置这些参数。详细信息请查看 借助 Mech-Eye Viewer 为 GenICam 客户端设置相机参数 。
提示
使用 Mech-Eye Viewer 连接相机前,需断开相机与 HALCON 的连接。如连接不成功,请关闭 HALCON 软件后,再重新连接。
使用 HALCON 例程¶
为方便使用,本公司在 GitHub 上提供了 HALCON 例程。该例程可用于连接相机、采集数据、修改参数并保存数据。用户可以直接使用或者根据实际需要进行修改以满足项目需求。
注解
HALCON 例程使用 C++ 语言编写,可以在 HALCON 软件的 HDevelop 集成开发环境中直接运行。
运行例程¶
请执行以下步骤运行例程:
获取 connect_to_camera_and_capture_images 例程 ,依次单击 即可下载。
在 HALCON 中打开例程:运行 HALCON,将例程拖拽至 HALCON 的 程序窗口 中。
选中 程序窗口 中 info_framegrabber 算子所在的行,单击工具栏中的
 按钮或单击键盘上的 F6 ,运行该算子。
按钮或单击键盘上的 F6 ,运行该算子。双击 控制变量 区域的 DeviceInfos ,可查看所有可连接的相机。

选中相机并双击,复制 unique_name: 或 user_name: 的相机名。

定位至如下命令行,将 MechEye 替换为 unique_name 或 user_name。
DeviceInfo := 'MechEye'
单击工具栏中的
 按钮或单击键盘上的 F5 ,运行例程。
按钮或单击键盘上的 F5 ,运行例程。运行结束后,在例程文件夹内查看本次运行获取的 2D 图和点云数据结果,默认保存文件名为 image2d.bmp 和 PointCloud.ply。
提示
例程运行结束后需单击工具栏中的
 重置程序执行,否则将导致 Mech-Eye Viewer 无法连接到相机。
重置程序执行,否则将导致 Mech-Eye Viewer 无法连接到相机。图形窗口显示点云后,需单击该窗口中的 Continue 继续执行。否则,程序会卡在 visualize_object_model_3d 算子中。
如相机采图时间较长,可为工控机 开启巨型帧功能 。
网络较差导致数据丢失时,可以使用如下指令增大最大允许丢失包数。 ParameterValues 替换为新的最大允许丢失包数。
set_framegrabber_param (AcqHandle, '[Stream]GevStreamMaxPacketGaps', ParameterValues)
调节参数¶
如获取的数据不满足需求,可调节相应参数。
提示
相机支持参数组功能,通过切换参数组可以快速切换相机的参数配置。相机参数需要在指定的参数组下设置。
如果需要增加或删除参数组,请通过 Mech-Eye Viewer 配置。
执行如下步骤调节参数:
使用以下算子获取相机的参数组列表。
get_framegrabber_param (AcqHandle, 'UserSetSelector_values', ParameterValues)
在 控制变量 区域的 ParameterValues 中,查看所有的参数组名称。
使用以下算子选择要修改的参数组。 UserSetSelector 和 UserSetLoad 为相机参数,分别用于选择和加载参数组。 ParameterGroupName 替换为实际参数组名称。
set_framegrabber_param (AcqHandle, 'UserSetSelector','ParameterGroupName') set_framegrabber_param (AcqHandle, 'UserSetLoad','ParameterGroupName')
使用以下算子获取指定参数的值。 ParameterName 替换为实际相机参数名称。 ParameterValues 是保存获取参数值的变量,可以根据需要调整。注意变量不需要置于引号内。
get_framegrabber_param (AcqHandle, 'ParameterName', ParameterValues)
在 控制变量 区域的 ParameterValues 中,查看该参数的值。
使用以下算子修改参数设置。 ParameterName 替换为实际相机参数名称, NewParameterValue 替换为新的参数值。
set_framegrabber_param (AcqHandle, 'ParameterName', 'NewParameterValue')
使用以下算子将参数设置修改保存到参数组中。 UserSetSave 为相机参数,用于保存参数设置到参数组。 ParameterGroupName 替换为实际参数组名称。
set_framegrabber_param (AcqHandle, 'UserSetSave', 'ParameterGroupName')
参考信息¶
关于 GenICam 支持的相机参数的描述和解释,请下载和查阅 GenICam 参数说明。
GenICam 支持的相机参数 与 Mech-Eye Viewer 提供的参数基本上一一对应。关于参数的对应关系,请参见 GenICam 支持的相机参数 。
设置 自动曝光感兴趣区域、 深度设置 及 感兴趣区域 等相机参数时,通常需要借助可视化工具进行不断调整从而获取理想的值。由于 HALCON 并未提供辅助参数设置的可视化工具,您可以借助 Mech-Eye Viewer 的可视化设置工具来设置这些参数。详细信息请查看 借助 Mech-Eye Viewer 为 GenICam 客户端设置相机参数 。
提示
使用 Mech-Eye Viewer 连接相机前,需断开相机与 HALCON 的连接。如连接不成功,请关闭 HALCON 软件后,再重新连接。