Pick Single Carton + Side Suction Cup¶
The parameters are shown below.
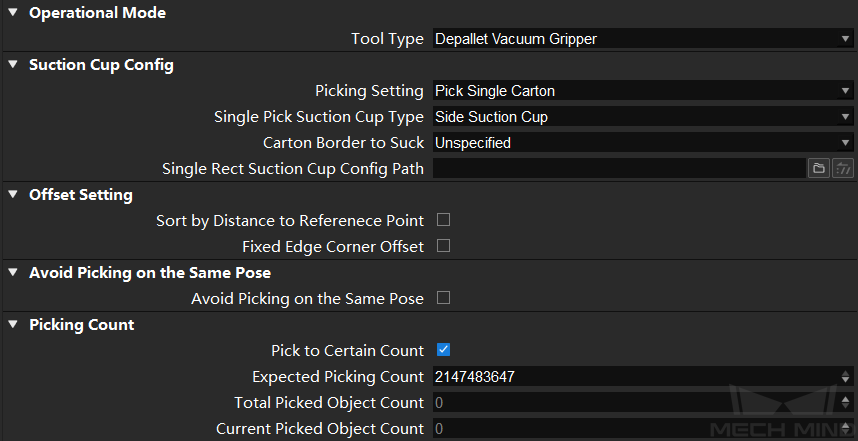
Suction Cup Config
- Carton Border to Suck
You can select from Unspecified, Long Side, and Short Side according to the actual situation.
- Single Rect Suction Cup Config Path
Click
 to select the suction cup configuration file. You can use the Depalletizing Vacuum Gripper to configure the suction cups and output a configuration file in JSON format.
to select the suction cup configuration file. You can use the Depalletizing Vacuum Gripper to configure the suction cups and output a configuration file in JSON format.
Offset Setting
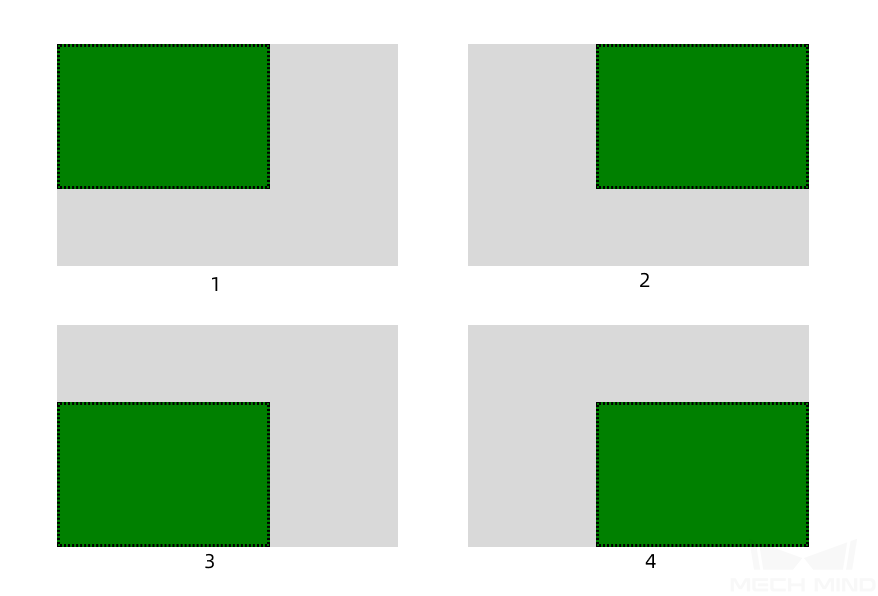
- Sort by Distance to Reference Point - Reference Point X/Y
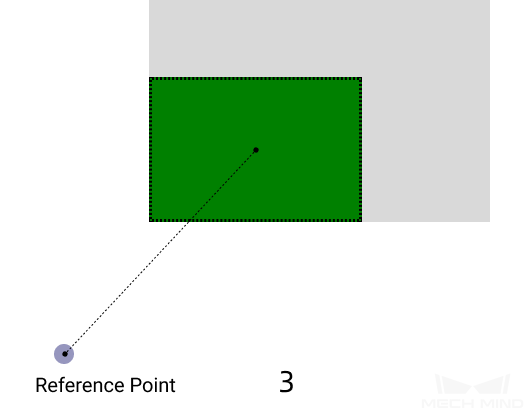
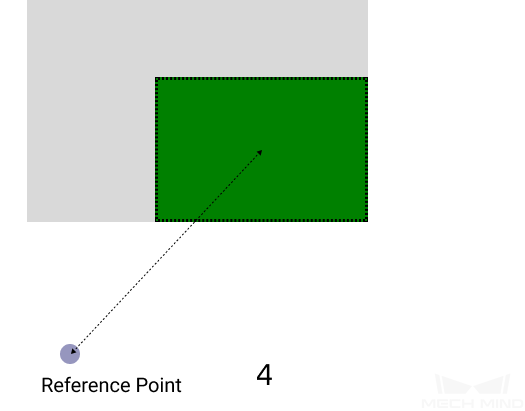
- Instruction: You need to set a reference point if you want to enable this parameter, and the robot will prioritize picking poses of which the suction cup is close to the reference point. This setting and the object symmetry settings cannot be enabled at the same time.Example:As shown in the figure below (top view perspective), the green rectangles represent cartons, and the gray rectangles represent suction cups. There are four picking strategies in total.
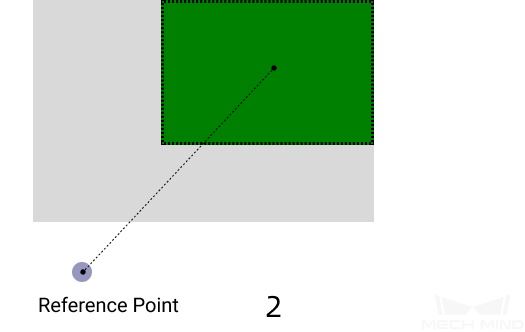
 The reference point is in the lower left corner to the carton, and the relative position of the reference point and the carton is fixed. Picking poses of which the suction cup is nearest to the reference point will be tried first.Therefore, the picking poses in the figure below will be tried in the order of .
The reference point is in the lower left corner to the carton, and the relative position of the reference point and the carton is fixed. Picking poses of which the suction cup is nearest to the reference point will be tried first.Therefore, the picking poses in the figure below will be tried in the order of .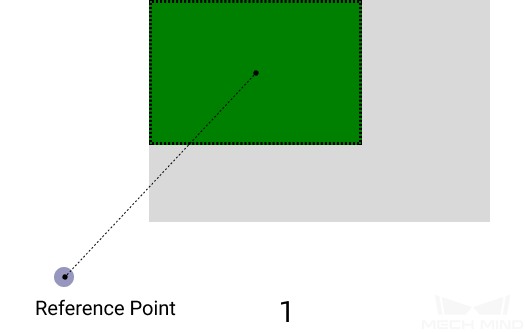
- Keep Only High Priority Offset—Max Plan Results Count
- Instruction: The default setting is 2. Please set the count according to the total planning results when a reference point is introduced.Example: If this option is enabled, only planning results No. 2 and No. 1 in the above example will be kept.
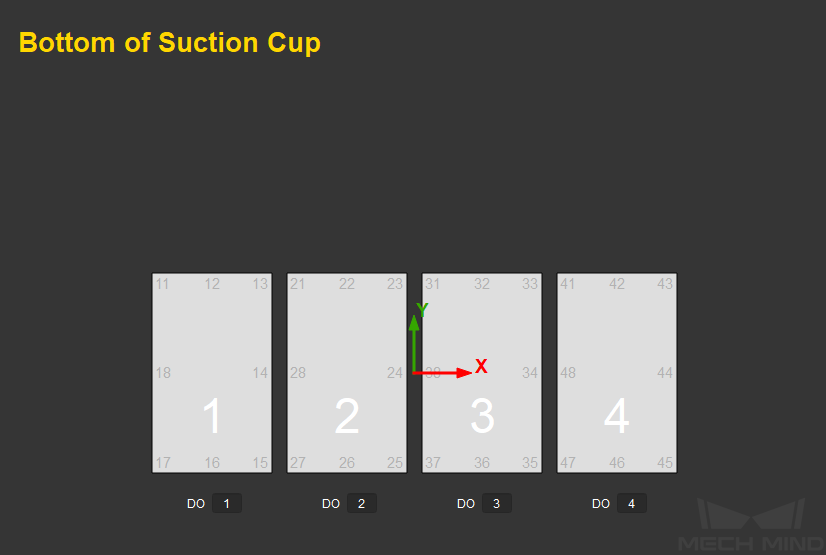
- Fixed Edge Corner Offset—Fixed Edge Corner Offset
- Enter the edge corner label numbers.The numbering rules of the edge/corner: The first digit of the label number indicates the number of the suction cup, and the second digit of the label number indicates whether it is an edge or corner, where 1, 3, 5, and 7 represent the corner and 2, 4, 6, and 8 represent the edge. 0 represents the center of the suction cup.
Please refer to Offset Strategy for detailed information.
Avoid Picking on the Same Pose
This parameter group is mainly used to avoid picking with the same picking pose in scenarios where the object cannot be picked successfully.
- Decreased Priority Range Radius Upper Limit
- Default setting: 0Description: If the distance between the current pick point and the most recently tried pick point is less than this value, the two pick points will be considered the same one and the priority for picking will be downgraded.
- Discard Range Radius Upper Limit
- Default setting: 0Description: If the distance between the current pick point and the most recently tried pick point is less than this value, the pick point will be discarded for picking.Example: For example, if the robot only moves the workpiece but fails to pick it in the first attempt, there is a possibility of successful picking in the next attempt. In this case, Decreased Priority Range Radius Upper Limit can be set to decrease the priority for picking the workpiece, while the object pose will be kept. When the robot fails to move the workpiece at all in the first attempt, it is highly unlikely that the workpiece can be picked successfully in the next attempt, and therefore Discard Range Radius Upper Limit can be set to discard the pose directly.
- Max Length of Avoidance List
- Default setting: 1Description: The maximum length of the avoidance list.Example: Assuming that the value is set to 2 and Mech-Vision outputs 3 poses, when pose 1 is used and the picking fails, pose 1 will be recorded. Pose 2 will also be recorded if the picking fails. However, when pose 3 is recorded, pose 1 will be discarded and only pose 2 and pose 3 will be kept in the avoidance list.
- Avoidance Type
- Workobject pose: Record the pose of the workobject. If the object has 3 pick points, and one of them was recorded as used during a failed picking, the rest two will not be included in the avoidance list.Workobject: Record the workobject. If the object has 3 pick points, and one of them was recorded as used during a failed picking, the rest two will be included in the avoidance list as well and the object will not be prioritized for picking next time.
Picking Count
This parameter group is used to count the picked objects and calculate the rest objects to be picked. Once you enter an Expected Picking Count, the Total Picked Object Count and Current Picked Object Count will be calculated automatically.
- Expected Picking Count
The maximum number of picked objects.
- Total Picked Object Count
The number of picked objects, which is counted automatically and cannot be modified.
- Current Picked Object Count
The number of the currently picked object, which is counted automatically and cannot be modified.