Apply Masks to Point Cloud¶
Function¶
Apply 2D mask to point cloud, and extract points that are in the area of each mask. The points outside the mask will be eliminated.
Usage Scenario¶
This Step is usually connected after the Step Instance Segmentation to extract point clouds that are within the mask.
Input and Output¶
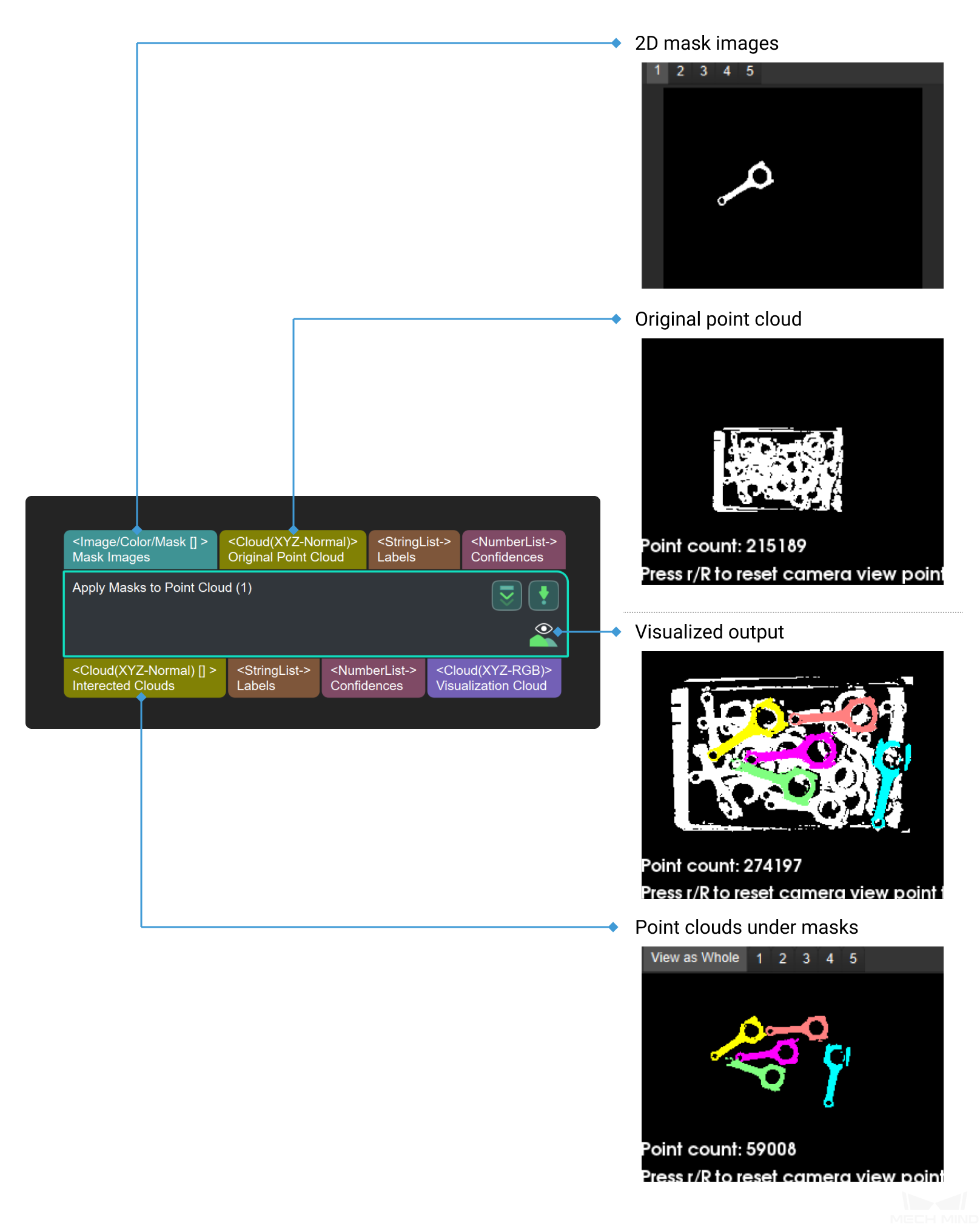
Parameter Descriptions¶
This Step does not have any parameter.