Send Point Cloud to External Service¶
Function¶
Send point cloud information to Mech-Viz.
Usage Scenario¶
Send point cloud to Mech-Viz for simulation and debugging or for checking the actual point cloud processing results.
Input and Output¶

Parameter Description¶
Cloud Settings
- Input Point Cloud Type
- Default setting: CloudXYZRGBOptions: CloudXYZRGB, CloudXYZ, CloudNORMALInstruction: Select the point cloud type to be sent according to the actual requirement.Example: When CloudXYZRGB, CloudXYZ, and CloudNORMAL are selected respectively, the input point clouds are shown below.



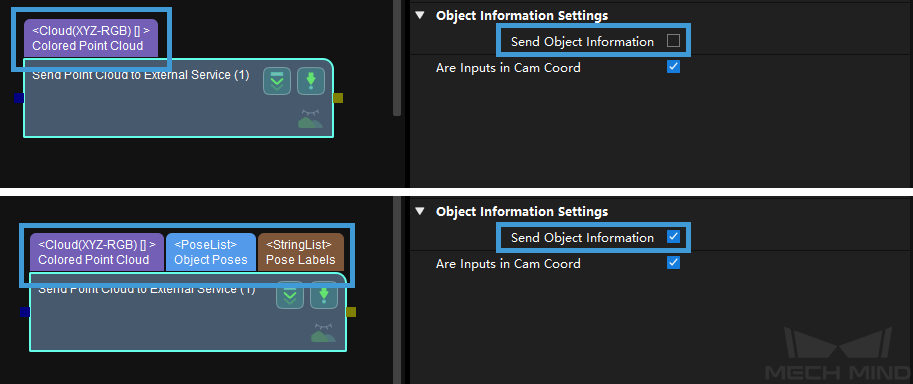
Object Information Settings
- Send Object Information
- Default setting: UnselectInstruction: When this option is not selected, Object Poses and Pose Labels ports will not appear. When this option is selected, Object Poses and Pose Labels ports will be available. Please select if you need to send Object Poses and Pose Labels to Mech-Viz. The figure below shows the Step when this option is selected and unselected.
Input Point Cloud in Camera Frame
Default setting: SelectInstruction: Once this option is selected, the input point cloud will be converted to the robot reference frame and then sent to Mech-Viz. If the option is not selected, the input point cloud in the camera reference frame will be sent to Mech-Viz directly.