Calc Poses and Dimensions from Planar Point Clouds¶
Function¶
This Step calculates the poses of planar point clouds and the dimensions of the point cloud bounding boxes.
Usage Scenario¶
This Step is usually used to calculate pick points and dimensions of planar point clouds of objects as cartons, sacks, etc.
Tip
Before using this Step, please filter and cluster the point cloud to reduce the interference from unwanted points.
Input and Output¶
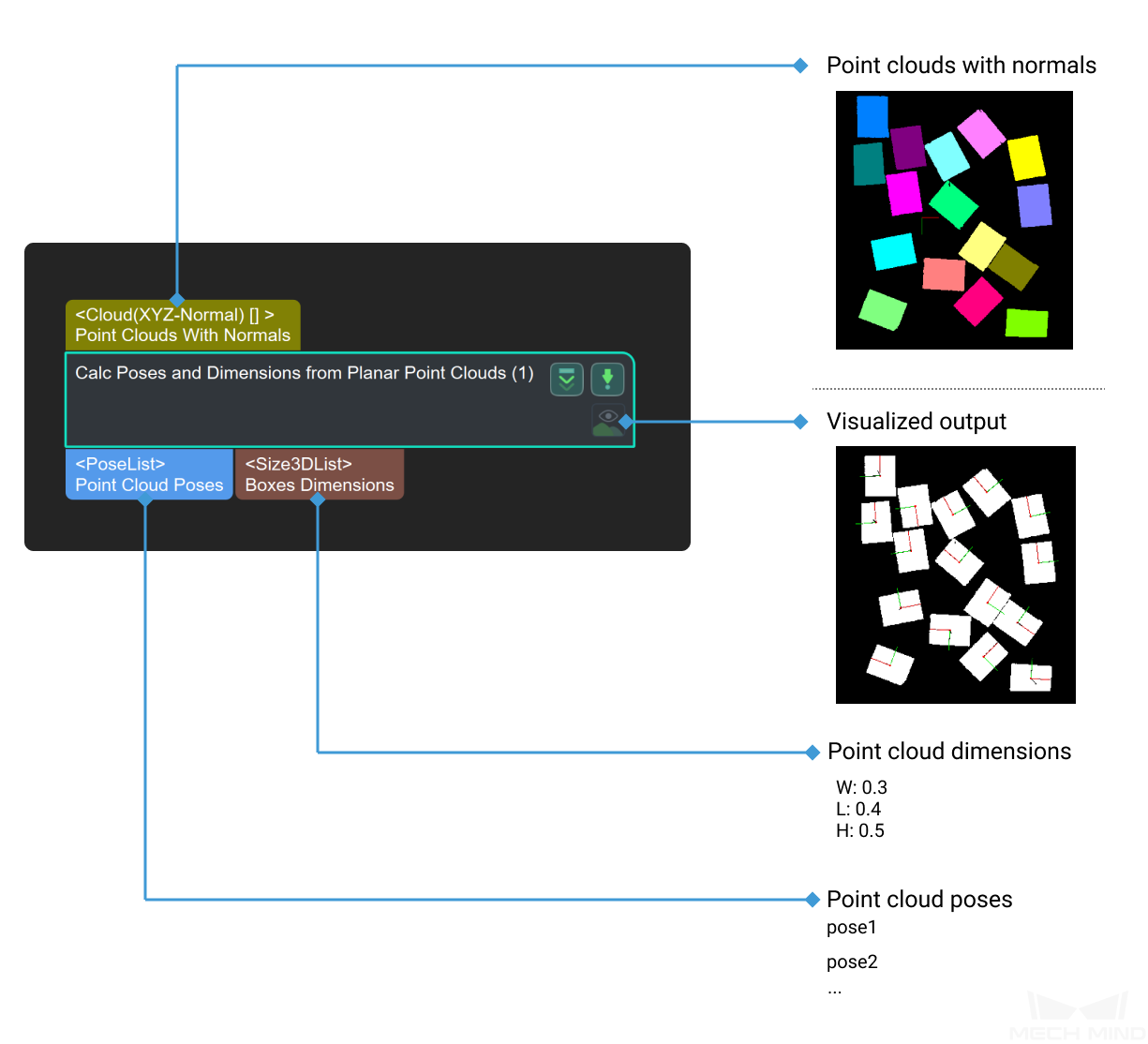
Parameter Description¶
Pose Calculation Settings
Hint
The selected Method to Calc Pose Center should correspond with the Method to Calc Pose Orientation.
When BoundingRectCenter is selected as the Method to Calc Pose Center, BoundingRectOrientation should be selected as the Method to Calc Pose Orientation.
When CloudCenter is selected as the Method to Calc Pose Center, CloudOrientation should be selected as the Method to Calc Pose Orientation.
- Method to Calc Pose Center
- Description: This parameter specifies the center where the pose position is located.Value list:
CloudCenter (Center of the point cloud): Select this method when the object point clouds scatter randomly, as shown in the left figure below.
BoundingRectCenter (Center of the point cloud’s bounding box): Select this method when the object point clouds are evenly spread, as shown in the right figure below.

Default value: BoundingRectCenterTuning recommendation: Please set the parameter according to the actual requirement. - Method to Calc Pose Orientation
- Description: This parameter specifies the orientation of the pose.Value list:
CloudOrientation (Orientation of the point cloud’s center): Select this method when the object point clouds scatter randomly, as shown in the left figure above.
BoundingRectOrientation (Orientation of the bounding box center): Select this method when the object point clouds are evenly spread, as shown in the right figure above.
Tuning recommendation: Please set the parameter according to the actual requirement. - Use Best Aligned Rect
- Description: This parameter determines whether to use a bounding rectangle whose edges are as parallel as possible to the edges of the object. If this option is NOT selected, a minimum bounding rectangle will be used.Default value: UnselectedTuning recommendation: Please set the parameter according to the actual requirement.
- Align Search Radius
- Description: This parameter determines whether the bounding rectangle aligns with the feature points of the object. The unit is pixels. When the distance between the feature point and the bounding rectangle is less than the value, the feature points are considered aligned with the bounding rectangle.Default value: 3 px
Hint
This parameter will appear only after you select Use Best Aligned Rect.
Box Pose Calculation Settings
Hint
This parameter group is applicable to cartons only.
- Calc Boxes’ Height
- Description: This parameter is used to calculate the carton’s height in the Z direction.Default value: UnselectedTuning recommendation: Please select this parameter when you need to calculate the carton’s height in the Z direction.
- Fixed Height for Box Bottom
- Description: This parameter specifies the height of the carton base, such as conveyor belt and pallet on which the carton is placed, for facilitating the calculation of the carton’s height in the Z direction.Default value: 0 mTuning recommendation: Please set the parameter according to the actual requirement.
Hint
This parameter will appear only after you select Calc Boxes’ Height.