Segment Depth Map¶
Function¶
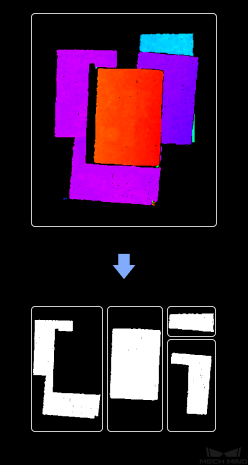
This Step is used to segment depth map according to specified rules and output areas that meet the rules.
Usage Scenario¶
This Step is widely used for depth map processing, and is usually connected with Steps as Invalidate Depth Pixels outside 3D ROI, Get Highest Layer Regions in Depth Map, Merge Mask Images, etc.
Input and Output¶

Parameters¶
- Max Height Diff between Neighbouring Pixels
- Description: This parameter is used to determine the maximum tolerance of depth difference (in mm) between neighbouring pixels in the process of segmenting the depth map. When the depth difference between neighbouring pixels is less than the set value, the two pixels will be considered as belonging to the same region; otherwise, the pixels will be considered as belonging to different segmented areas. The larger the value, the more segmented areas.Default value: 7.000 mmTuning recommendation: Please set according to the real scenarios.
- Min Segment Area
- Description: This parameter specifies the minimum size of the segmented areas (in pixel). The segmented areas smaller than this value will be discarded. The smaller the value, the more segmented areas.Default value: 1500 pxTuning recommendation: Please set according to the real scenarios.
- Depth ROI File Name
- Description: This parameter is used to select an ROI on the color image. Please refer to Instructions for Setting 2D ROI for detailed instructions.Default value: depth_image_roi.json