Mecanismo de Escaneo del Perfilador Láser
El perfilador láser usa el emisor láser y la unidad fotosensible interna para escanear el objeto de destino. Este capítulo presenta el proceso básico de escaneo y los conceptos relevantes.
Proceso Básico de Escaneo
-
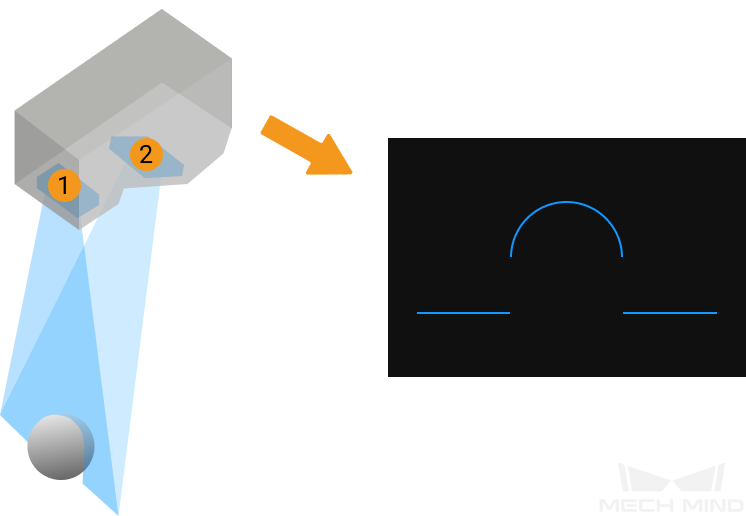
El emisor láser (1 en la figura de arriba) emite una línea de luz láser en la superficie del objeto de destino dentro del FOV del perfilador láser.
-
La luz láser es reflejada por el objeto de destino y recibida por la unidad fotosensible (2 en la figura de arriba). Debido al ángulo entre la unidad fotosensible y el emisor láser, la luz láser reflejada por el objeto de destino cae en diferentes posiciones de la unidad fotosensible según la altura. La imagen generada en la unidad fotosensible en este momento es la imagen sin procesar en Mech-Eye Viewer.
-
El emisor láser, la unidad fotosensible y el objeto de destino forman un triángulo. Usando la triangulación, el perfilador láser puede calcular las distancias entre los puntos en la luz láser reflejada al sensor, teniendo en cuenta el ángulo y la información de distancia.
-
Según el resultado de cálculo y otros ajustes de parámetros, el perfilador láser extrae un perfil desde la imagen sin procesar. El perfil refleja las variaciones de distancia al sensor a lo largo de una sección del objeto de destino, es decir, las variaciones de altura.
-
El objeto de destino mueve con respecto al perfilador láser. El perfilador láser repite los pasos mencionados para completar varios escaneos, y obtener una serie de perfiles del objeto de destino. Estos perfiles sirven para generar la imagen de intensidad, el mapa de profundidad y la nube de puntos.
Conceptos Relevantes
-
Escaneo de línea: Un proceso en el que el perfilador láser emite una luz láser y genera un perfil.
-
Ronda de adquisición de datos: Un proceso en el que el perfilador láser completa varios escaneos de línea, genera múltiples perfiles, y fusiona estos perfiles para generar la imagen de intensidad, el mapa de profundidad y la nube de puntos.
-
Activar/Disparo: Una acción que hace que el perfilador láser inicie una ronda de adquisición de datos o un escaneo de línea.
Hay dos métodos de disparo para activar una ronda de adquisición de datos y un escaneo de línea, cada uno adecuado para diferentes escenarios. Para obtener más información, consulte el capítulo Métodos para Activar la Adquisición de Datos.