工具栏¶
Mech-Center 工具栏包括部署设置、启动 Viz/Vision 、启动相机查看器、运行、启动接口服务、主控机器人和管理员七个按钮。
部署设置¶
部署设置用于实现 Mech-Center 的基础设置、配置各软件的打开路径、查看自动加载的工程路径和选择外部服务等功能。
偏好设置¶
偏好设置选项用于个性化的全局设置,如下图所示。 用户可根据自身使用习惯进行相关设置,如:切换软件主题色彩、切换 Mech-Center 软件界面语言(目前软件支持中、英、日、韩四种语言)、更改保存日志等。
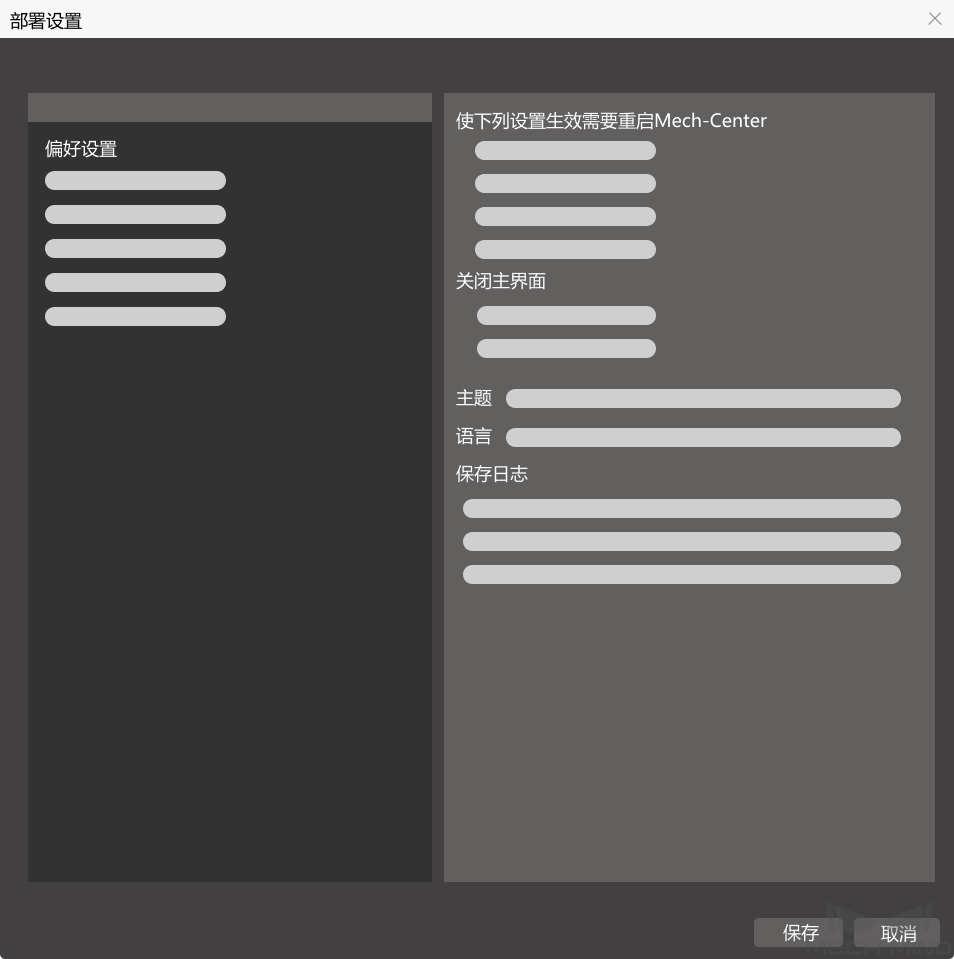
勾选 运行时隐藏控制台 后,启动 Mech-Center 软件后,控制台将隐藏。
勾选 开机时自动运行 Mech-Center 后,可以实现 Mech-Center 软件开机自启。
勾选 自动启动 Mech-Viz/Mech-Vision/Mech-Interface(如果有) 后,可以在启动 Mech-Center 软件后, Mech-Viz/Mech-Vision/Mech-Interface 也随后自启。
勾选 启动 Mech-Viz/Mech-Vision 到托盘 后,启动的 Mech-Viz/Mech-Vision 软件将隐藏至桌面状态栏的托盘处。
注意
保存更改并重启 Mech-Center 后,设置才能生效。
Mech-Viz¶
Mech-Viz 选项用于设置 Mech-Viz 软件的打开路径并显示自动加载的工程路径,如下图所示。
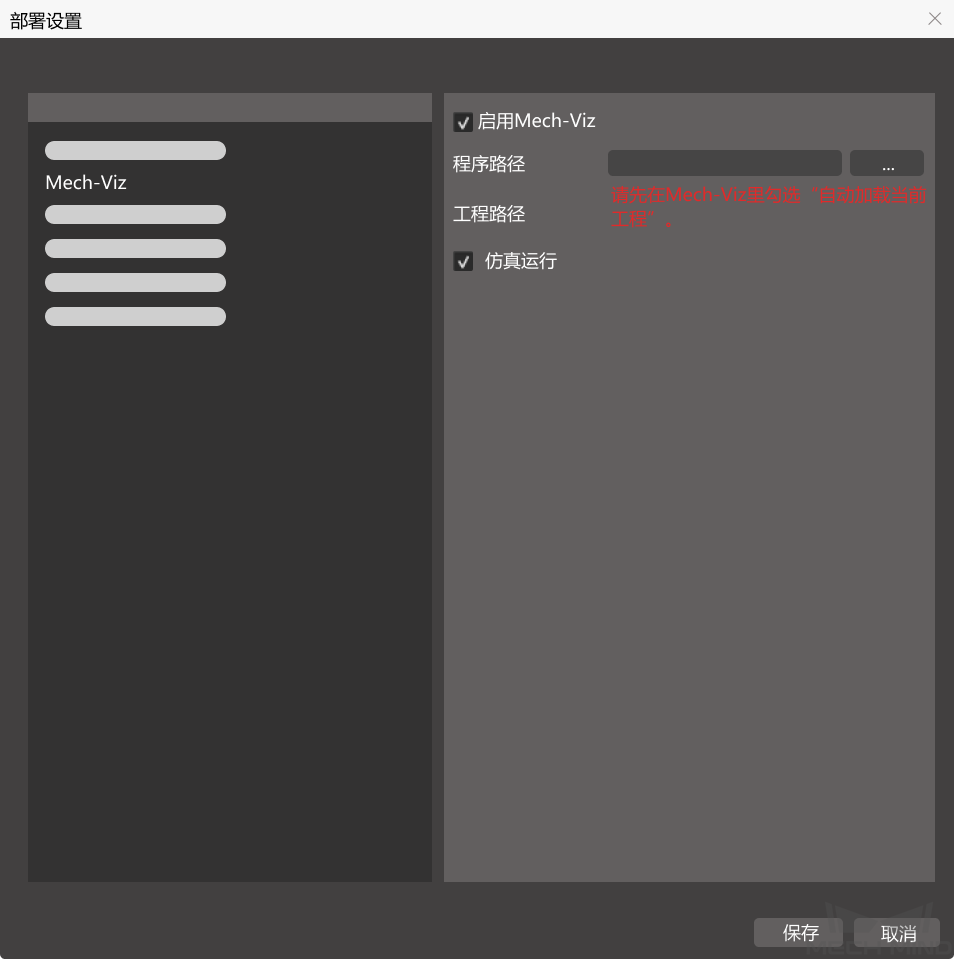
单击左侧 Mech-Viz ,进入设置界面,默认勾选 启用 Mech-Viz 。
单击程序路径后的 … ,选择 Mech-Viz 安装目录下的 mmind_viz.exe 文件,即可完成路径选择。
在Mech-Viz中勾选 自动加载当前工程 ,工程路径会自动加载,无需手动添加路径。
注解
勾选 仿真运行 后,Mech-Viz 软件将只进行仿真,不会移动真实机器人。
Mech-Vision 、Mech-Eye Viewer¶
Mech-Vision、Mech-Eye Viewer 部署设置方式与 Mech-Viz 类似。
Robot Server¶
Robot Server 选项用于适配机器人,以实现 Mech-Viz 软件的主控,如下图所示。
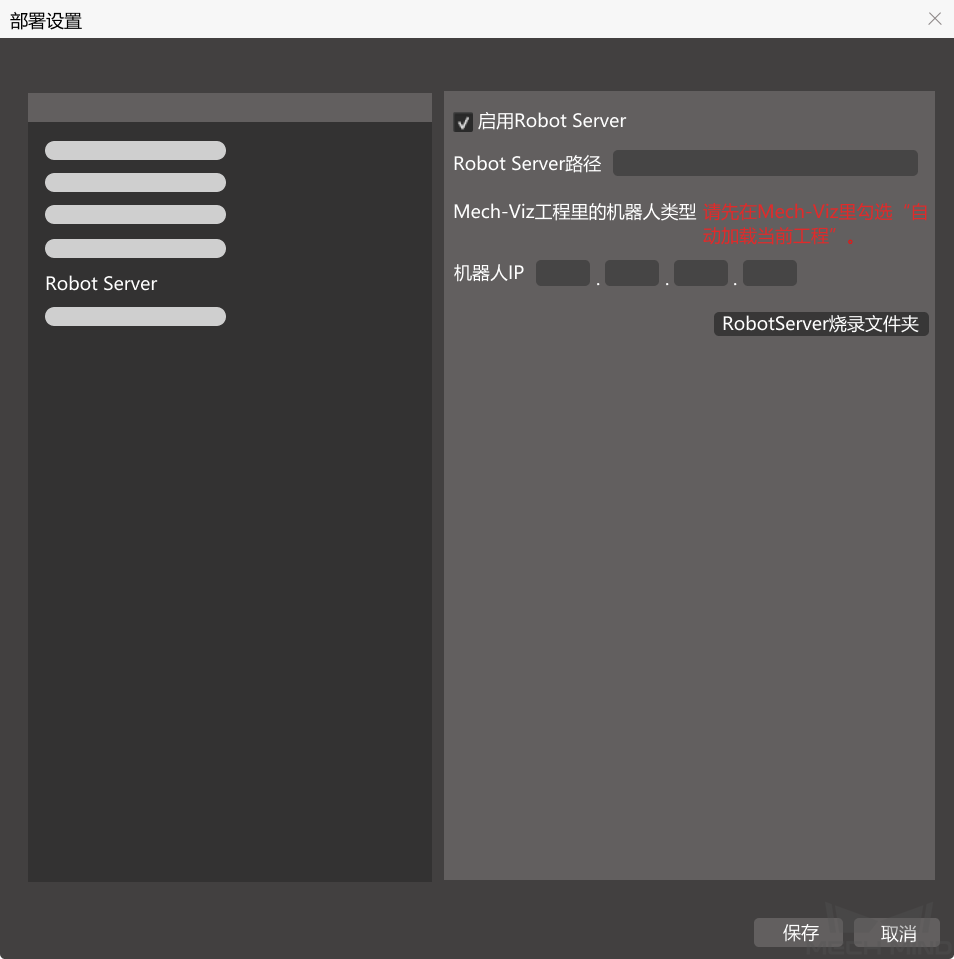
单击左侧 Robot Server ,进入设置界面。默认勾选 启用 Robot Server ,并自动加载随 Mech-Center 一起安装的 Robot Server 路径。
注意
成功加载 Mech-Viz 工程后,Mech-Viz 工程里的机器人类型将自动显示,无需填写。机器人 IP 需按照实际工程中的设置填写,并确保正确。
Mech-Interface¶
Mech-Interface 是统一的外部接口,实现与第三方的通信。
启动 Mech-Viz、Mech-Vision¶
Mech-Viz/Mech-Vision 软件成功启动后,软件图标及其版本会显示在服务状态栏。
注意
运行工程时将会进行版本兼容性检测,建议搭配 V1.4.0 及以上版本的 Mech-Viz、Mech-Vision、Mech-Center 使用。
当 Mech-Center 发现另外两款软件版本均低于 1.4.0 时,将提示版本必须高于 1.4.0 ,并且点击 运行 后弹出错误提示框。
启动相机查看器¶
Mech-Eye Viewer 软件成功启动后,软件图标会出现在桌面状态栏。
运行¶
运行 Mech-Viz 和 Mech-Vision 中加载的工程。
启动接口服务¶
启动 Mech-Interface 。
主控机器人¶
成功连接真实机器人后,机器人图标及其型号会显示在服务状态栏。
管理员¶
Mech-Center 中有管理员和操作员两种模式,默认为管理员模式。当使用操作员模式时,无法编辑工程和修改配置, 图标显示为操作员模式。如需切换,可单击图标,在登录对话框选择用户类型后单击 登录 。
其中管理员模式需要登录密码,如需修改密码,可以在菜单栏的 处修改。