混載パレットパターン¶
機能¶
寸法が異なる対象物をパレタイズします。ビジョン処理による認識 によって対象箱の寸法を認識して、かつパラメータを設定してパレットパターンを自動的に生成します。
使用シーン¶
寸法が異なる箱をパレタイズします。
パラメータ¶
- 移動ステップの共通パラメータ
詳しくは 移動ステップの共通パラメータ をお読みください。
- パレタイジングステップの共通パラメータ
詳しくは パレタイジングステップの共通パラメータ をお読みください。
- パレットのサイズ
パレット X 辺長:パレットの長さを設定します。
パレット Y 辺長:パレットの幅を設定します。
パレット高さ:パレットパターンの最大高さを設定します。
パレットの高さ制限を超える値の許容範囲:箱を配置する時にパレット高さを超える値の許容範囲。
例:
パレット高さ を 600mm に、パレットの高さ制限を超える値の許容範囲 を 100mm に設定すると、パレットの最大高さは 600mm + 100mm = 700mm になります。現在の箱の山の高さは 450mm の場合、これから続けて箱を配置できる高さは 700mm - 450mm = 250mm になります。
高さが 250mm 以上の箱:配置できません
高さが 250mm 以下の箱:配置できる
- パレットパターン
Online:これから配置する箱の寸法がわからない場合に選択します。次の一個の箱を配置する経路を計画します。
Offline:これから配置する箱の寸法が全部わかる場合に選択します。一回にすべての箱を配置する経路を計画します。
ヒント
デバッグする時にパレットパターン関連パラメータを調整するために使用します。
ロボット実機の実行をサポートしていません。
Online
パレットパターンの設定
- 箱の最短間隔
- 優先コーナー
説明:配置する時に優先的に配置するパレットのコーナー。パレットの位置姿勢の変化とともに変化します。
OO:パレットの基準コーナー。ロボット座標系の -Y、-X 方向にあるコーナー。
OY:OO コーナーを基準に、ロボット座標系の Y 方向にあるコーナー。
XY:OO コーナーを基準に、ロボット座標系の Y 方向と X 方向にあるコーナー。
XO:OO コーナーを基準に、ロボット座標系の X 方向にあるコーナー。
OO
OY
XY
XO
落下配置
- 落下配置を有効にする
:初期値で、落下による配置をしません。
:箱が配置位置から Z 方向に沿う距離がある範囲にある場合に、落下によって配置することができます。
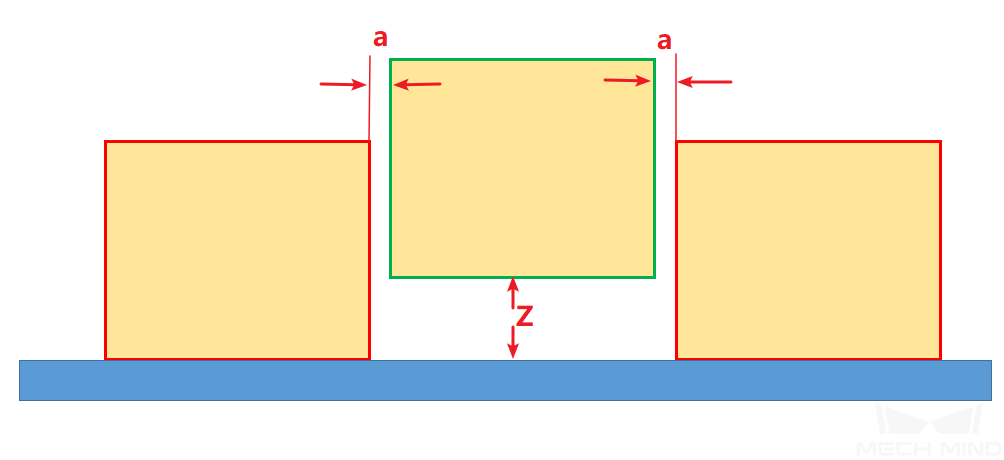
使用シーン:低い箱を高い箱の間に配置するときに落下させます。これにより、衝突を回避できます。落下高さ:落下配置を有効にする をチェックすると表示されます。箱を落下させる高さを設定します。単位:mm。安全落下間隔:配置する箱の側面と隣接する箱の最小間隔。単位:mm。下図では Z は 落下高さ であり、a は 安全落下間隔 です。
- 再撮影して箱の寸法を更新
ビジョン処理による移動ステップは箱を把持したが箱の高さの情報を取得していない場合に、配置位置と重みを計算する時に箱の高さも推定し、推定された高さによって計画します。再撮影して箱の高さを取得してから 2 回目に計画します。
ヒント
把持済み対象物を更新 と合わせて使用することができます。
候補位置の数の制限
- 候補位置の合計数の制限
- 単一の箱の候補位置の数の制限
ラベル付き箱
- 箱のラベルを外に向ける
ラベルのパレットのエッジまでの最大距離:箱のラベルがパレットエッジまでの距離の最大許容値。単位:mm。
候補位置のパラメータを計算
- パレットエッジを超える幅の許容範囲
箱がパレットのエッジをはみ出す幅の許容範囲。推奨値:20 ~ 50mm。
- 箱が平面を超える比例の許容範囲
箱がその下の平面をはみ出す面積の最大比例。
- 段の平面高低差の最大値
平面高低差がこの値より小さい段を平面と見なして箱を配置します。
- サンプリング率
- 進入方向の X 軸角度
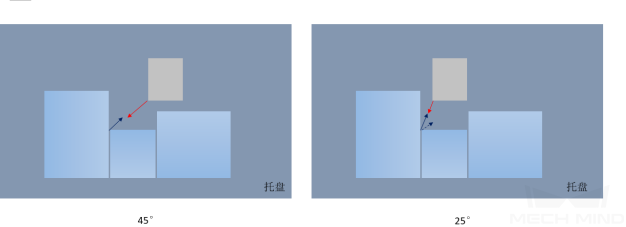 値をあんまり大きく設定すると、U 字型の空き領域ができるかもしれません。あんまり小さく設定すると、箱の衝突が発生する恐れがあります。推奨値:15°~30°。
値をあんまり大きく設定すると、U 字型の空き領域ができるかもしれません。あんまり小さく設定すると、箱の衝突が発生する恐れがあります。推奨値:15°~30°。- 中間点を使用
- コーナー安全半径
コーナーへの到達方向を決定するとき、この半径にあるコーナーに到達する指定方向が XOY 投影平面に障害物があるかをチェックします。
- グリッパーのZ方向高さ
グリッパーの底面からフランジから二番目のロボット関節の底面までのZ方向の距離。単位:mm。
- 中点安全間隔
箱を中間点候補位置に配置する時に箱の両側の隙間隔。単位:mm。
ロボットの運動誤差と箱の寸法誤差に許容されれば、このパラメータを間隔よりも小さい値に設定してもかまいません。
候補位置スコアの重み
説明:このグループのパラメータを設定することでパレットに配置する箱の位置を指定します。
- 隣接面積
値が高いほど、側面が隣接する箱との接触する面積が大きい候補位置は使用される可能性は高くなります。
- 荷重面積
値が高いほど、配置する箱の荷重がかかわる面積が大きい(下の表面をはみ出す領域が狭い)位置が使用される可能性は高くなります。
- 箱の配置位置の高さ
配置する箱の底面からパレットまでの Z 方向に沿う高さの差。値が高く、かつ目標位置が低いほど、箱が低い平面に配置される可能性は高くなります。
- 優先コーナーまでの投影距離
値が高いほど、優先コーナーまでの距離がパレットの対角線に投影する長さが短い位置が使用される可能性は高くなります。
- 荷重箱の数
値が高いほど、荷重をかかわる下段の箱の数が多い位置が使用される可能性は高くなります。この値を高く設定するとより安定的なパレットパターンを生成できますが空き領域が出てきます。
ヒント
値を調整するとき、倍にすることを推奨します。例えば箱を優先コーナーに配置したい場合、優先コーナーまでの投影距離 の値を倍にして効果を確認してください。
- 底の面積の重み
値が高いほど、底面が広い箱が配置される可能性は高くなります。
- パレットのエッジまでの距離
値が高いほど、箱をパレットのエッジに近づいて配置します。
Offline
パレットパターンの設定
- 箱の最短間隔
- 優先コーナー
説明:配置する時に優先的に配置するパレットのコーナー。パレットの位置姿勢の変化とともに変化します。
OO:パレットの基準コーナー。ロボット座標系の -Y、-X 方向にあるコーナー。
OY:OO コーナーを基準に、ロボット座標系の Y 方向にあるコーナー。
XY:OO コーナーを基準に、ロボット座標系の Y 方向と X 方向にあるコーナー。
XO:OO コーナーを基準に、ロボット座標系の X 方向にあるコーナー。
OO
OY
XY
XO
- オフラインメソッド
ベストフィット:箱の寸法が大きく異なる場合やインラインに設定した場合に適しています。パレットパターンはほかの 3 種類ほど規則的ではありません。
スタックごとに:箱の寸法などによってスタックごとに配置します。
段ごとに:優先的に寸法が同じな箱を同じ段に配置します。
バッチごとに:SKU ごとに配置します。このようにして、AGV を使用する現場では、AGV の供給回数を削減できます。
- パレットのインデックス
- 箱の最短辺長