相対移動¶
機能¶
座標系や移動の方向、回転が選択できます。
使用シーン¶
ビジョン処理による移動 の前あるいは後に使用します。視覚点の Z 軸に沿って相対移動します。
パラメータ¶
- 移動ステップの共通パラメータ
詳しくは 移動ステップの共通パラメータ をお読みください。
- 把持された対象物との衝突検出モード
詳しくは 把持された対象物との検出モード をお読みください。
- 基本的な移動設定
詳しくは 基本的な移動設定 をお読みください。
- 移動基準
- オプション:前の経路点に対して、次の経路点に対して調整説明:前の経路点に対して は前の経路点を基準に移動します。次の経路点に対して は次の経路点を基準に移動します。
目標点タイプ¶
ロボットハンド¶
「基準経路点」の「ロボットハンド座標原点」からオフセットします。
ヒント
「基準経路点」とは。「前の経路点」または「次の経路点」のことです。
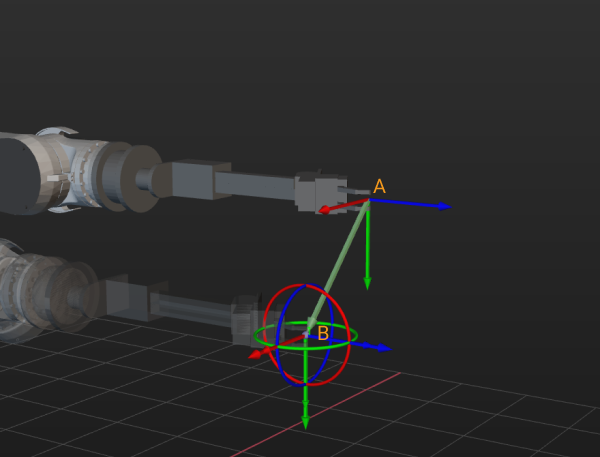
- 座標
オフセット距離を設定するために使用されます。
下図に示すように、A は基準経路点で、B は X、Yを300に設定した時のオフセット結果です。このステップを実行すると、ロボットは A から B に移動します。
ロボット¶
「基準経路点」から「ロボット座標系の方向」に沿ってオフセットします。
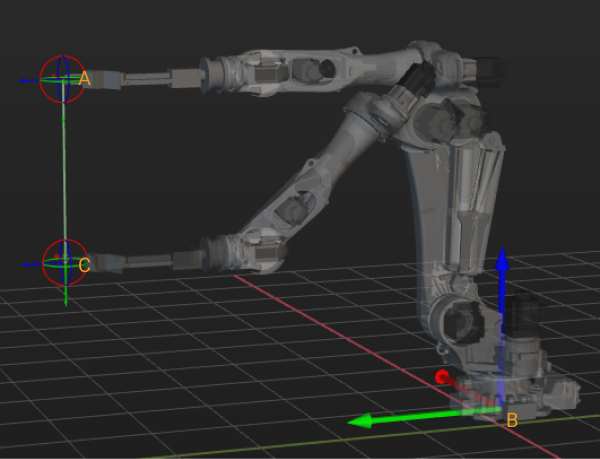
- 座標
オフセット距離を設定するために使用されます。
下図に示すように、A は基準経路点で、B はロボット座標系の原点で。C は Z を -1000 に設定した時のオフセット結果です。このステップを実行すると、ロボットは A から C に移動します。
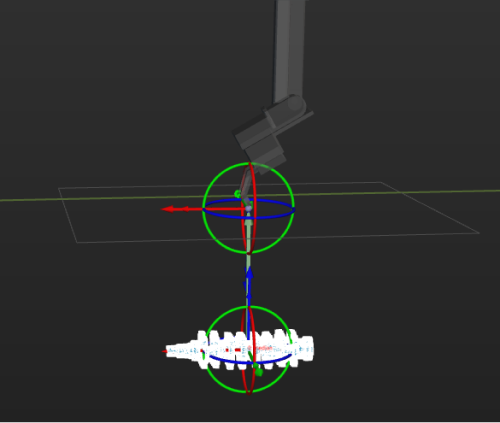
X/Y/Z をロック
Zをロック を常にチェックします。Zをロック をチェックすると、下図に示すように平面が表示されます。ビジョン処理による移動 と併用することで相対移動を指定した Z 値に固定します。これによってロボットが把持を実行したあとで所定の高さに移動します。
基準点¶
基準点は基準方向を指定します。対象物が深いコンテナに配置された場合、把持する時にロボットとコンテナとの衝突が発生する可能性があります。基準点 を選択して設定することで相対移動をオフセットすることができます。これによって衝突回避が可能になります。普通、ビジョン処理による移動 と組み合わせて使用します。
- マークポイント X/Y/Z
基準点の位置を設定します。
- 経路点の位置
オフセット距離を設定するために使用されます。
世界座標系のZ値:オフセット点から世界座標系のXOY平面までの垂直距離。
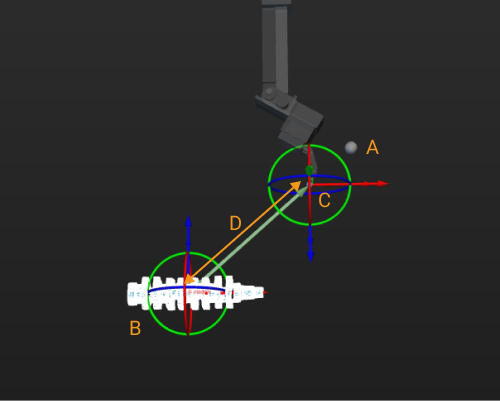
下図では、A は基準点で、B は「基準経路点」で、C はオフセット点で、D はオフセット点から世界座標系の XOY 平面までの垂直距離です。
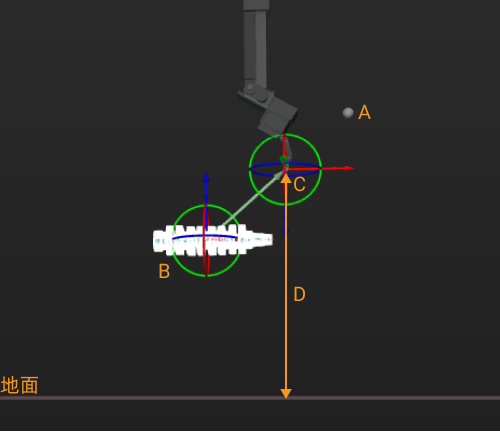
元位置までの距離:基準点に向かう方向に沿って移動する距離。
下図では、A は基準点で、B は「基準経路点」で、C はオフセット点で、D は基準点に向かう方向に沿って移動する距離です。
XOY 平面で移動 をチェックすると、「基準経路点」の XOY 平面にのみオフセット点を設定できます。