Start Here
Application
Software User Manuals
Robot Integrations
Support
Appendix
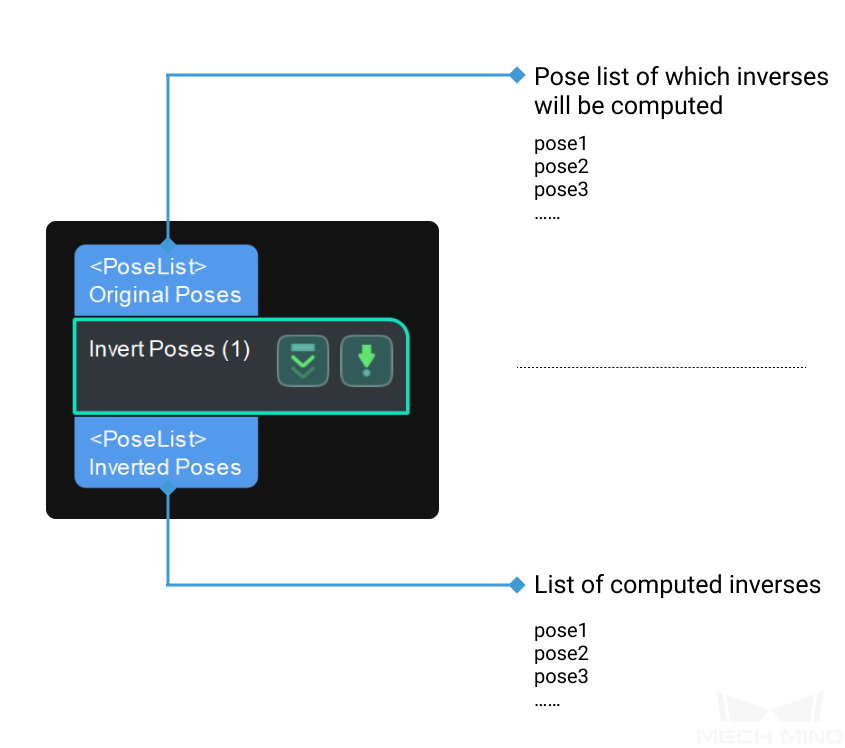
This Step obtains the inverses of the poses in the input list.
This Step is a general pose calculation Step. This Step can be used for transformation between reference frames.