Standard Interface¶
When only the targets are needed and the Mech-Mind system is not needed to control the robot’s movement, the standard interface can be used to transmit the data.
The standard interface only provides the most basic interface functions, such as sending vision points and task data. If more interface functions are required, please see Adapter for details.
The standard interface is integrated into the Mech-Center software and no additional generation is required. The service can be started directly in the software.
Instructions¶
Start Mech-Interface:¶
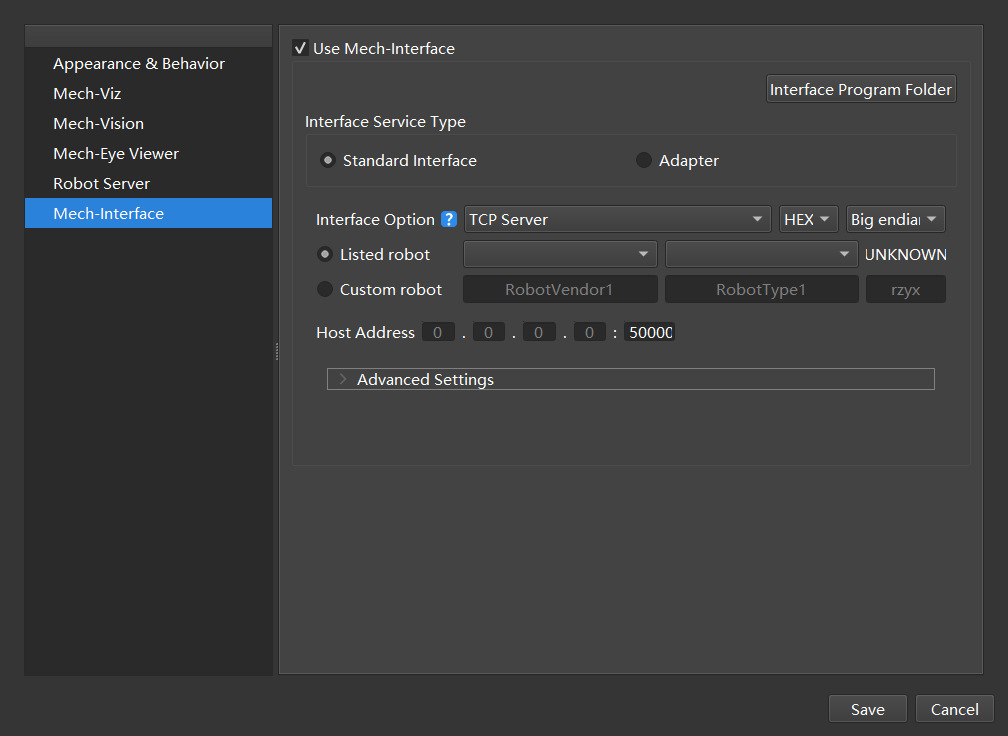
Interface Options, Host Address:¶
There are two types of external services: TCP Server and Siemens PLC Client.
Siemens PLC Client:
For Siemens PLC Client, the PLC IP and the DB Block Number need to be set. The default DB Block Number is 10.
TCP Server:
For TCP Server, the protocol format needs to be selected as ASCII or HEX. In HEX, please select Big Endian / Little Endian, i.e., “>” (big-endian) or “<” (little-endian). For TCP Server, the port number needs to be set as appropriate, and the default port number is 50000.
Please select the valid communication format to write the interface program based on the setup of the robot.
Robot type |
Standard Interface example programs |
|
Industrial |
ABB |
HEX |
FANUC |
HEX |
|
KUKA |
HEX |
|
YASKAWA |
ASCII |
|
KAWASAKI |
ASCII |
|
ROKAE |
ASCII |
|
NACHI |
ASCII |
|
Collaborative |
FANUC CRX |
Plugin (HEX) |
UR |
URCap (ASCII) |
|
TM |
Plug and play (ASCII) |
|
JAKA |
Example programs (ASCII) and AddOn file |
|
ELITE |
ASCII |
|
Other |
No example program has been provided yet. Please write the interface program based on the robot’s support for HEX and ASCII. |
|
Tip
The robot interface example program package and operating documents are located in Robot_Interface under the software installation directory.
- PROFINET
PROFINET requires setting the robot model.
- EtherNet/IP
EtherNet/IP requires setting the robot model.
- Modbus TCP Slave
Modbus TCP Slave requires setting the slave IP, port number, device address, and byte order (you can do tests to determine the byte order).
Select a robot:¶
Click
to select the corresponding robot brand and model.
After the setting is complete, save and restart Mech-Center. After restarting, click Start Interface on the interface to enable the standard interface.