포인트 클라우드 파라미터 조절¶
힌트
파라미터 명칭에 * 부호가 나타나면 현재 파라미터가 저장되지 않는다는 뜻입니다. 저장 을 클릭하거나 ctrl + S 를 눌러 파라미터를 저장하십시오.
포인트 클라우드 후속 처리¶
포인트 클라우드 후속 처리 를 조절하여 포인트 클라우드의 효과를 최적화할 수 있습니다. 주로 포인트 클라우드 평활화 노이즈 제거 및 프로젝터 휘도 대비 역치 를 통해 조절합니다.
포인트 클라우드 평활화¶
이 파라미터는 포인트 클라우드 생성 시 표면 평활화 알고리즘의 강도를 조절할 수 있습니다.
옵션 |
설명 |
Off |
평활화 처리를 진행하지 않습니다. |
Weak |
가벼운 정도의 표면 평활화 처리를 진행합니다.평탄도가 개선되는 동시에 아주 적은 디테일은 잃게 될 것입니다. |
Normal |
중간 정도의 표면 평활화 처리를 진행합니다.평탄도가 개선되는 동시에 일부 디테일은 잃게 될 것입니다. |
Strong |
높은 정도의 표면 평활화 처리를 진행합니다.중간 정도의 디테일은 잃게 되지만 포인트 클라우드의 평탄도가 최적입니다. |
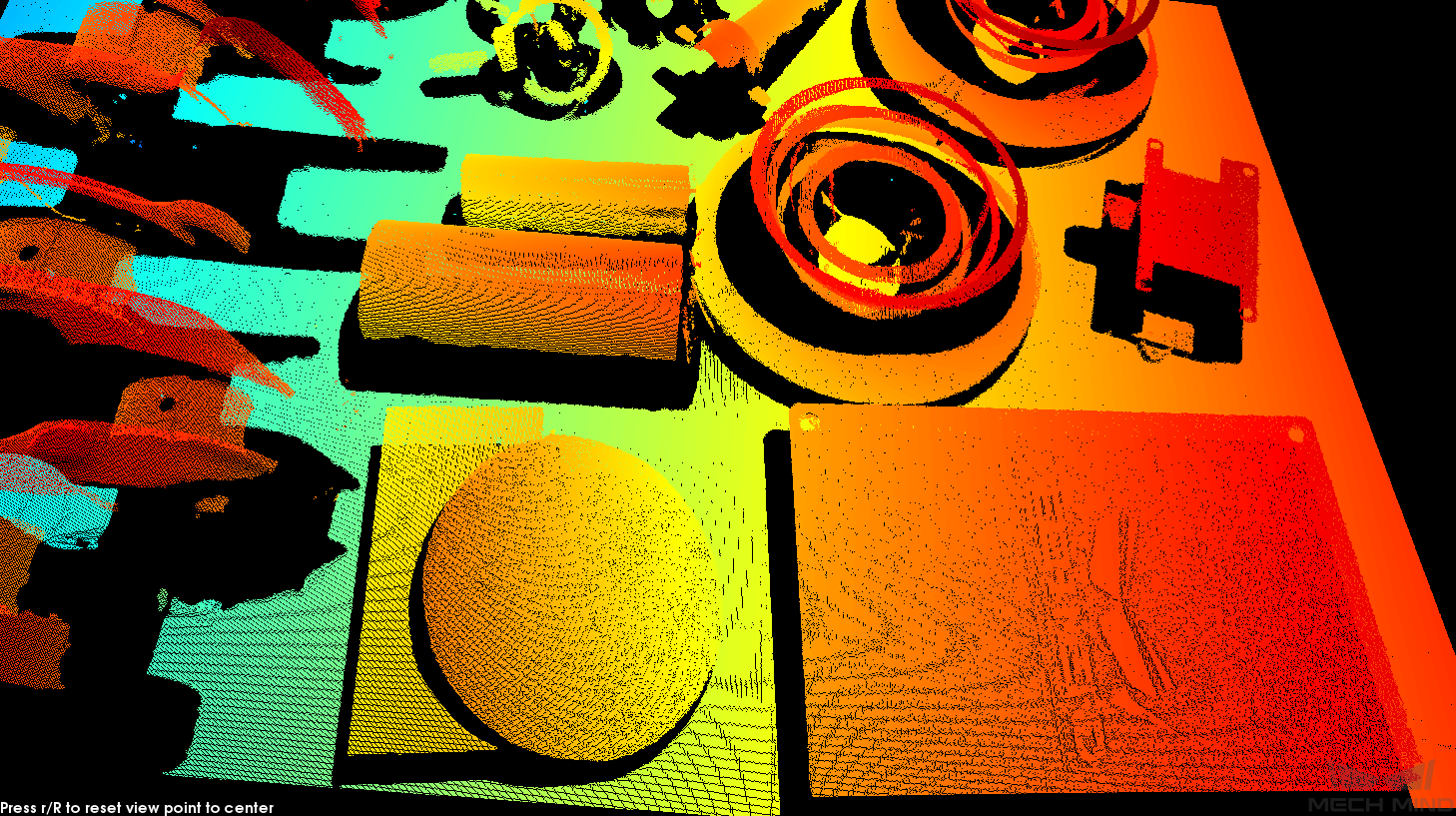
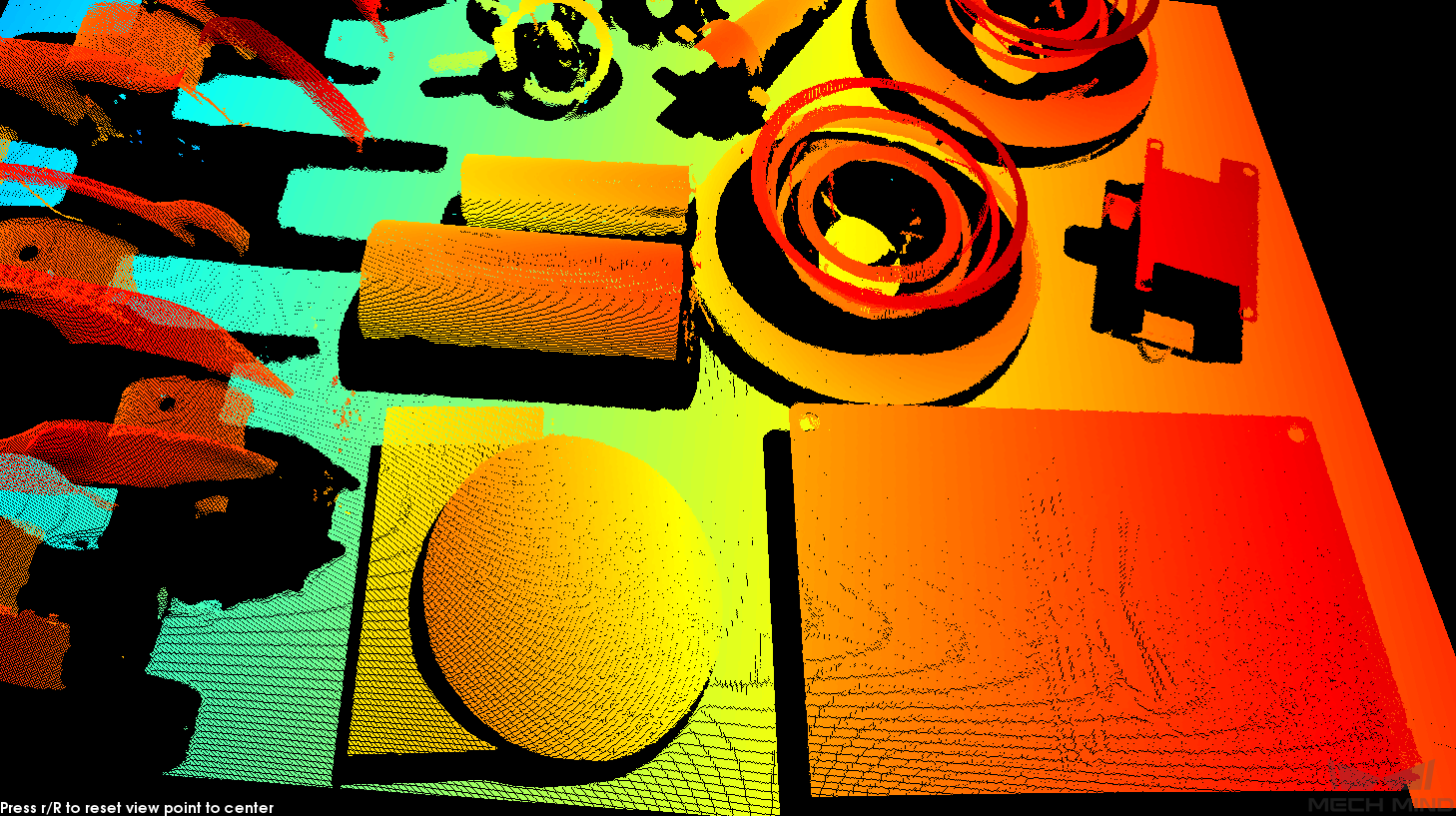
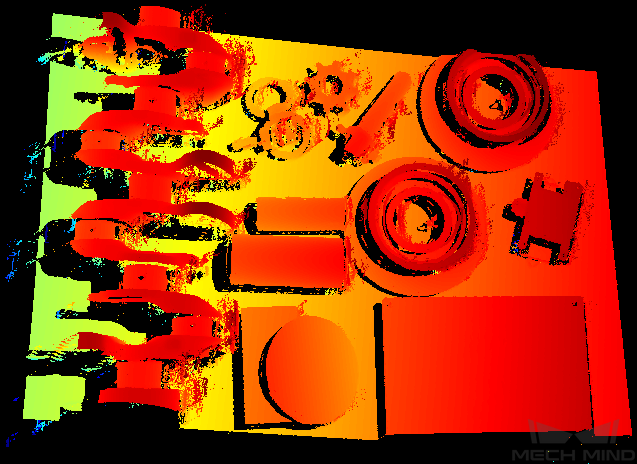
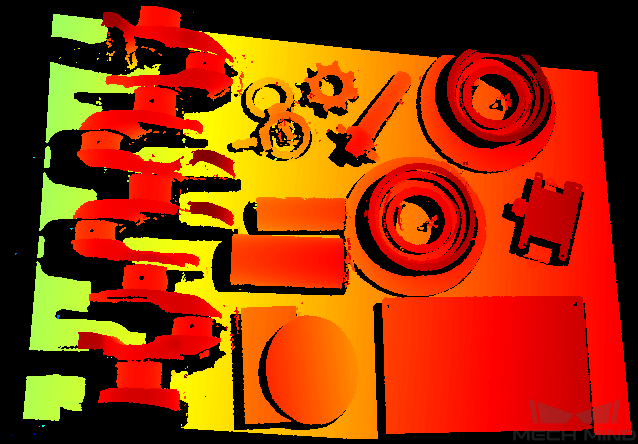
다른 포인트 클라우드 평활화 강도를 사용할 때의 이미지 대비:
Off |
Weak |
|
|
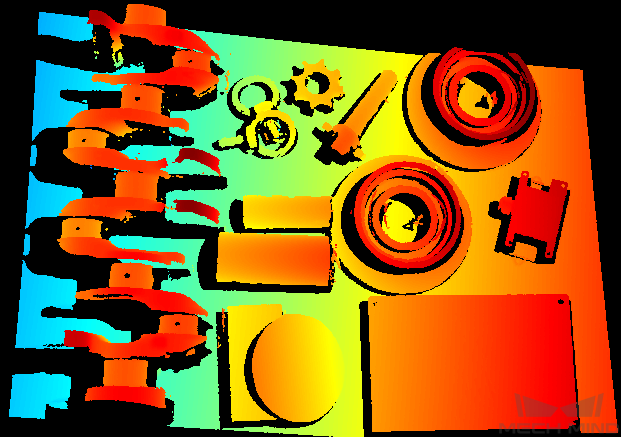
Normal |
Strong |
|
|
힌트
강도: Off < Weak < Normal < Strong . 강도가 높을 수록 포인트 클라우드의 디테일이 흐릿해지고 일정한 데이터가 잃게 될수도 있습니다.
노이즈 제거¶
이 파라미터는 포인트 클라우드 생성 시 노이즈 제거 알고리즘의 강도를 조절할 수 있습니다.
기본값:Normal.
옵션 |
설명 |
Off |
노이즈를 제거하지 않습니다.일정한 노이즈가 존재할 수 있습니다. |
Weak |
일부 노이즈가 제거되고 에지가 완전한 상태에서 노이즈를 제거할 수 있습니다. |
Normal |
대부분 노이즈가 제거되고 일부 상황에서 에지 침식 현상이 나타날 수 있습니다. |
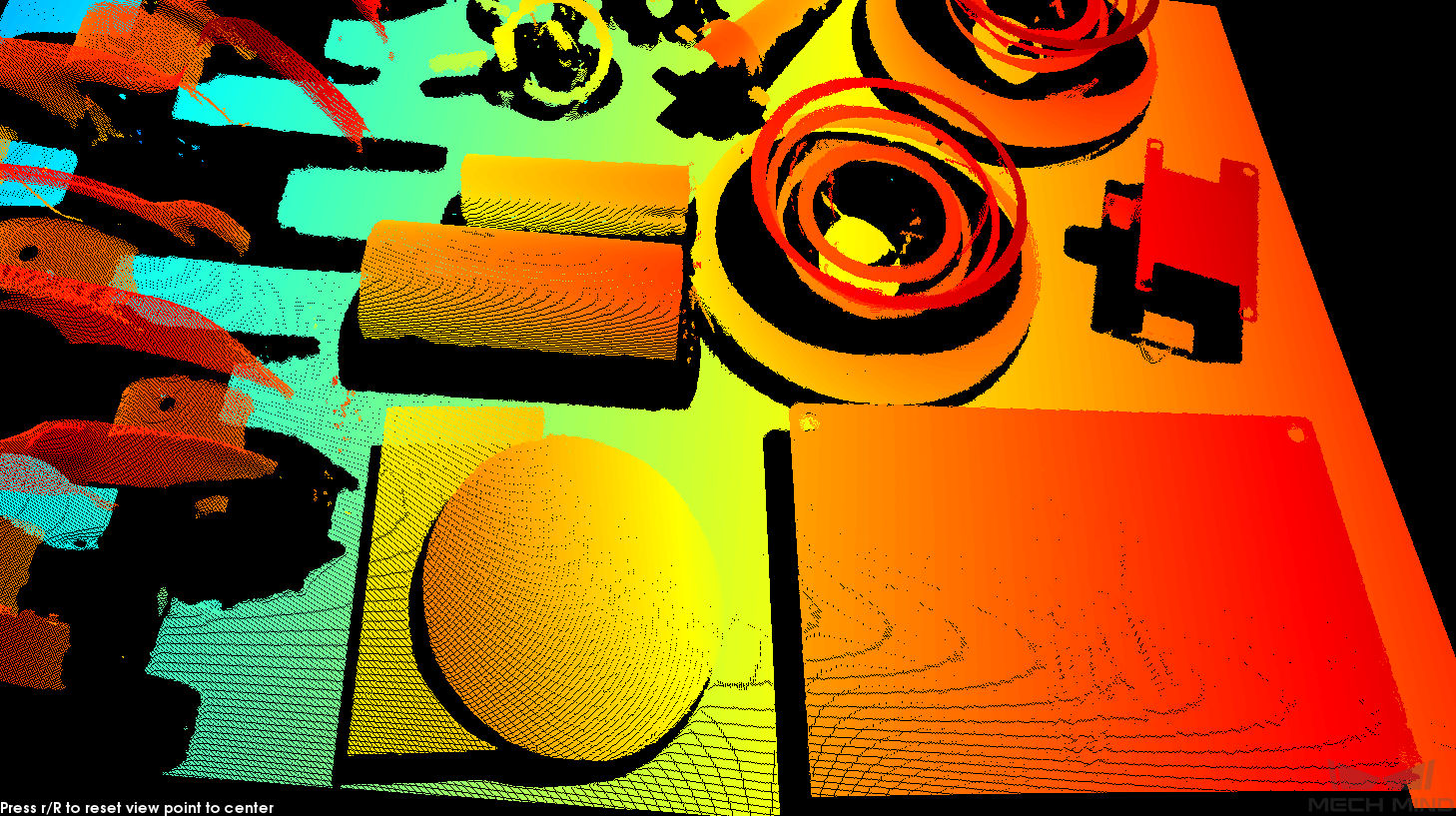
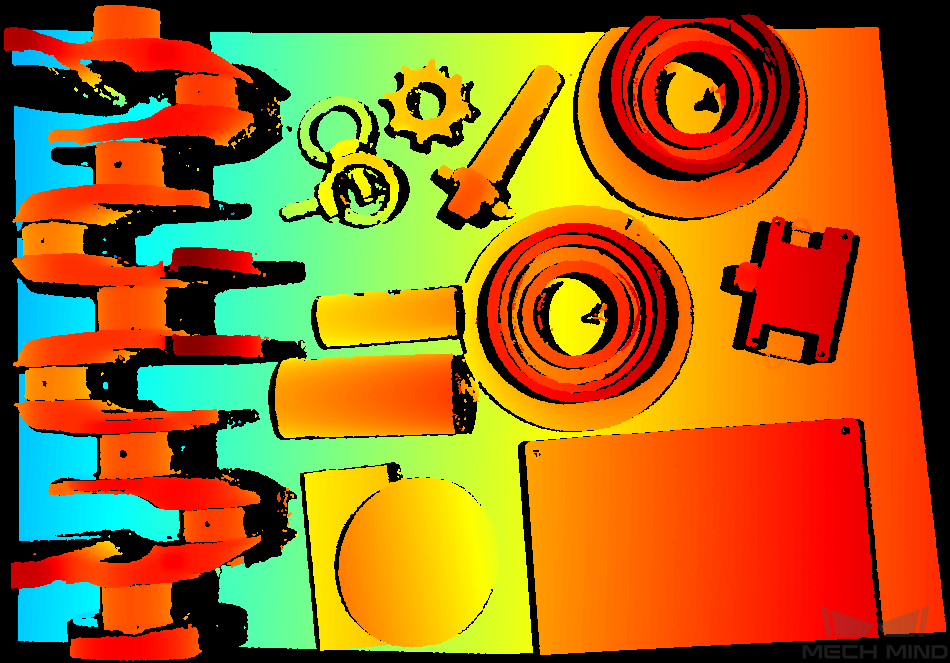
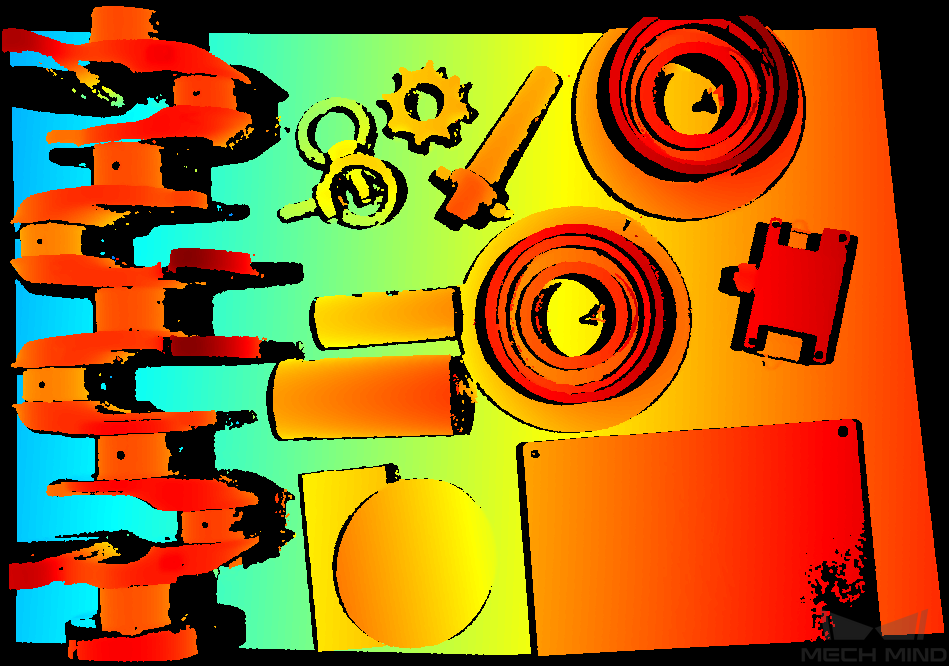
다른 노이즈 제거 강도를 사용할 때의 이미지 대비:
Off |
Weak |
Normal |
|
|
|
|
|

|
힌트
강도: Off < Weak < Normal .
프로젝터 휘도 대비 역치¶
이 역치보다 작은 픽셀은 무효로 간주될 것입니다. 수치를 크게 설정하면 이미지 속의 노이즈를 제거하는 동시에 어두운 물체도 함께 제거할 가능성이 있습니다.
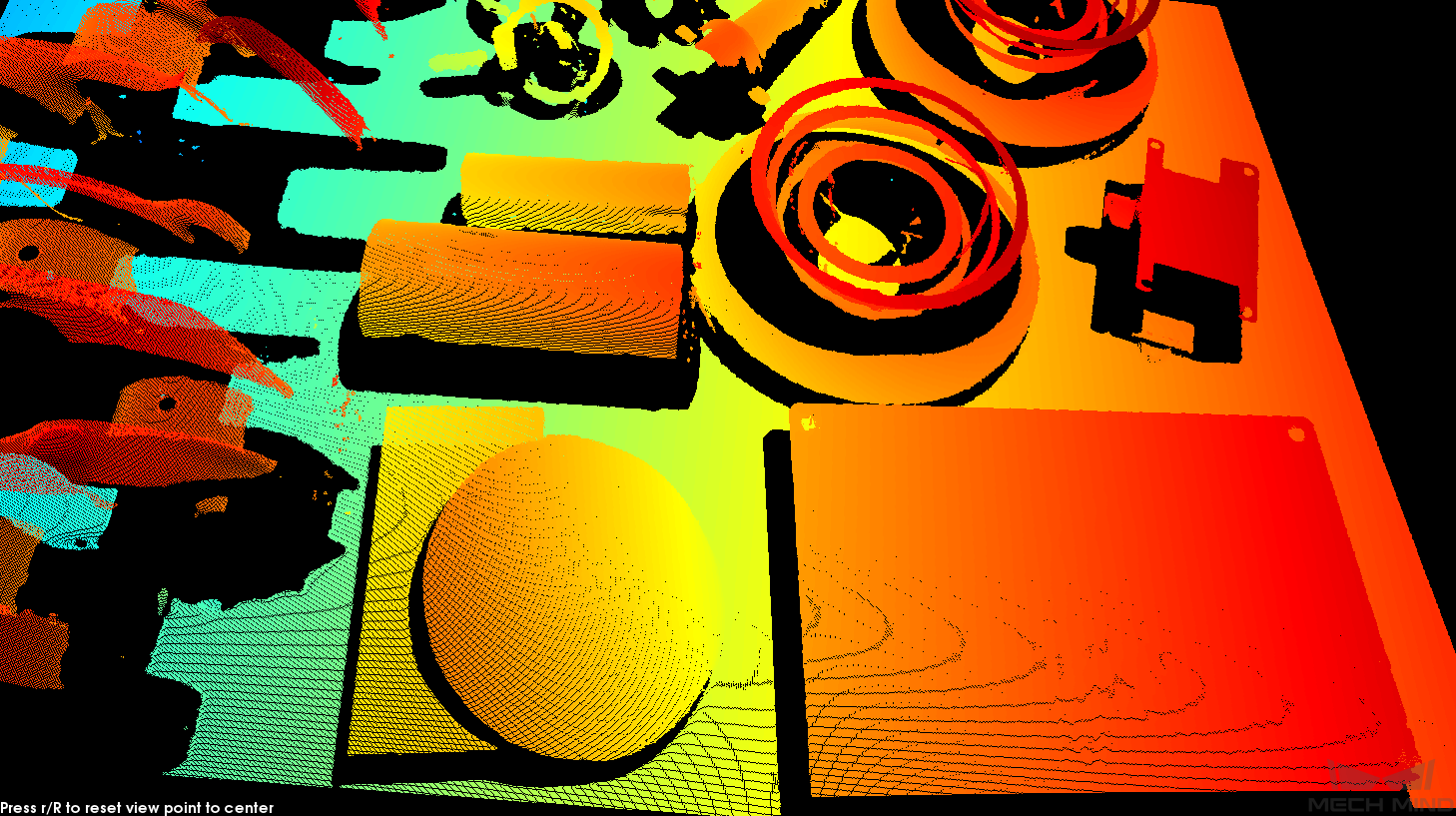
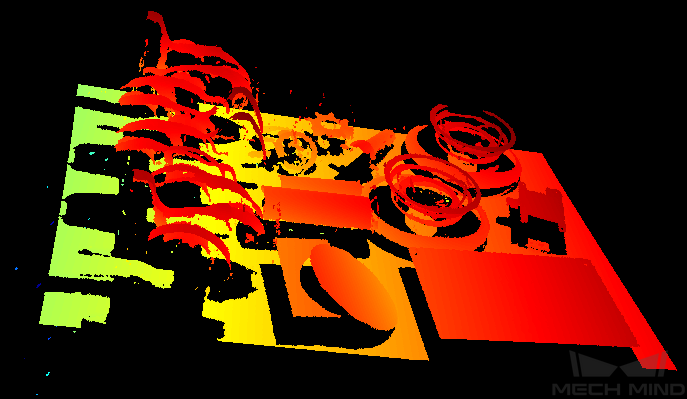
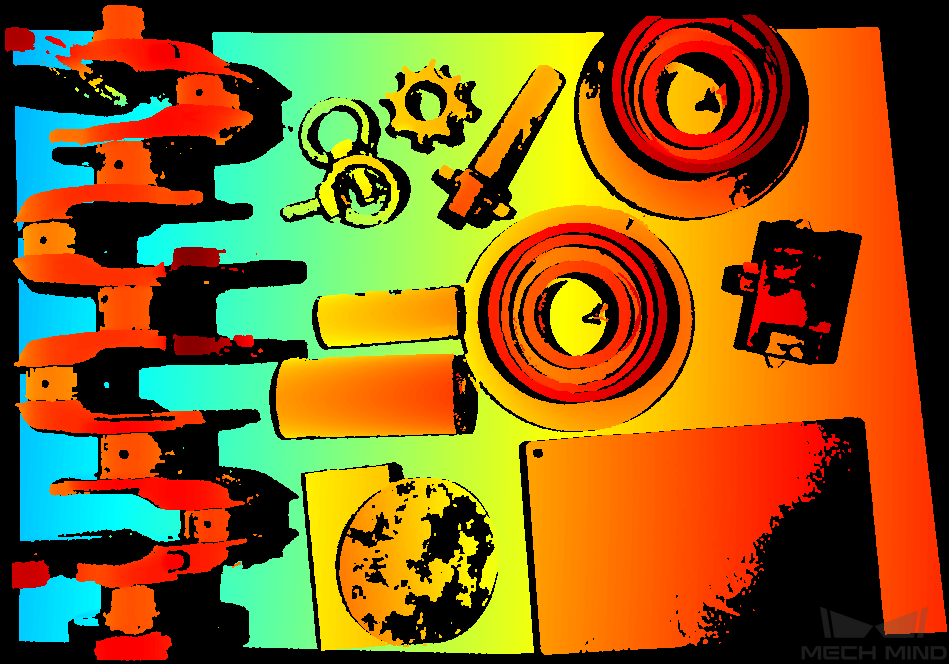
다른 프로젝터 휘도 대비 역치 강도를 사용할 때의 이미지 대비:
3 |
15 |
30 |
|
|
|
힌트
일반적으로 포인트 클라우드 평활화 및 노이즈 제거 는 Normal 를 선택하면 되고 프로젝터 휘도 대비 역치 는 3을 선택하면 됩니다.
작업 현장에서 캡처된 이미지의 효과가 좋지 않으면 카메라의 원시 데이터 및 이미지를 저장하여 해당 담당자에게 피드백하세요.
뎁스 측정 범위 조절¶
뎁스 맵에서 상하 방향의 ROI를 설정하고 측정 범위 외의 데이터를 제거합니다. ROI는 상하한 사이의 구역입니다.
상/하한 범위:1~9999mm.
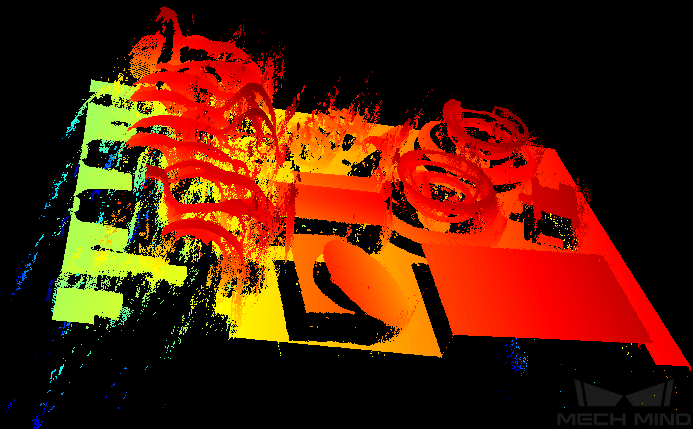
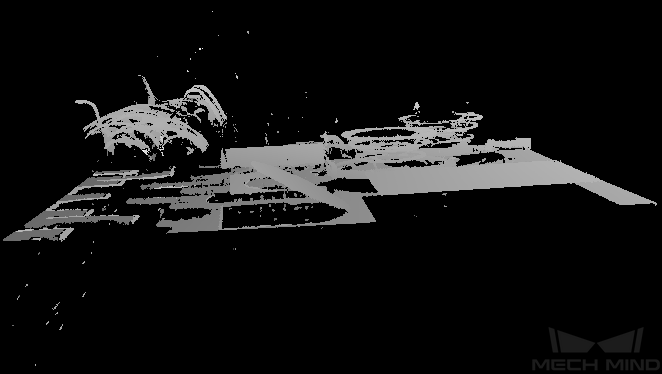
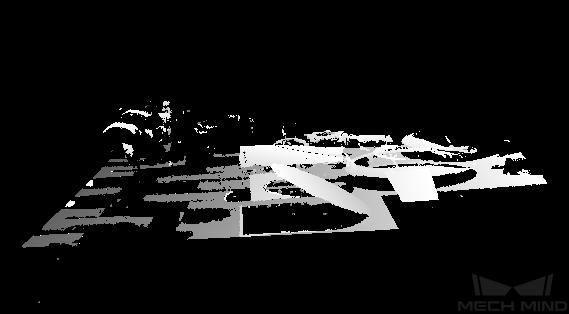
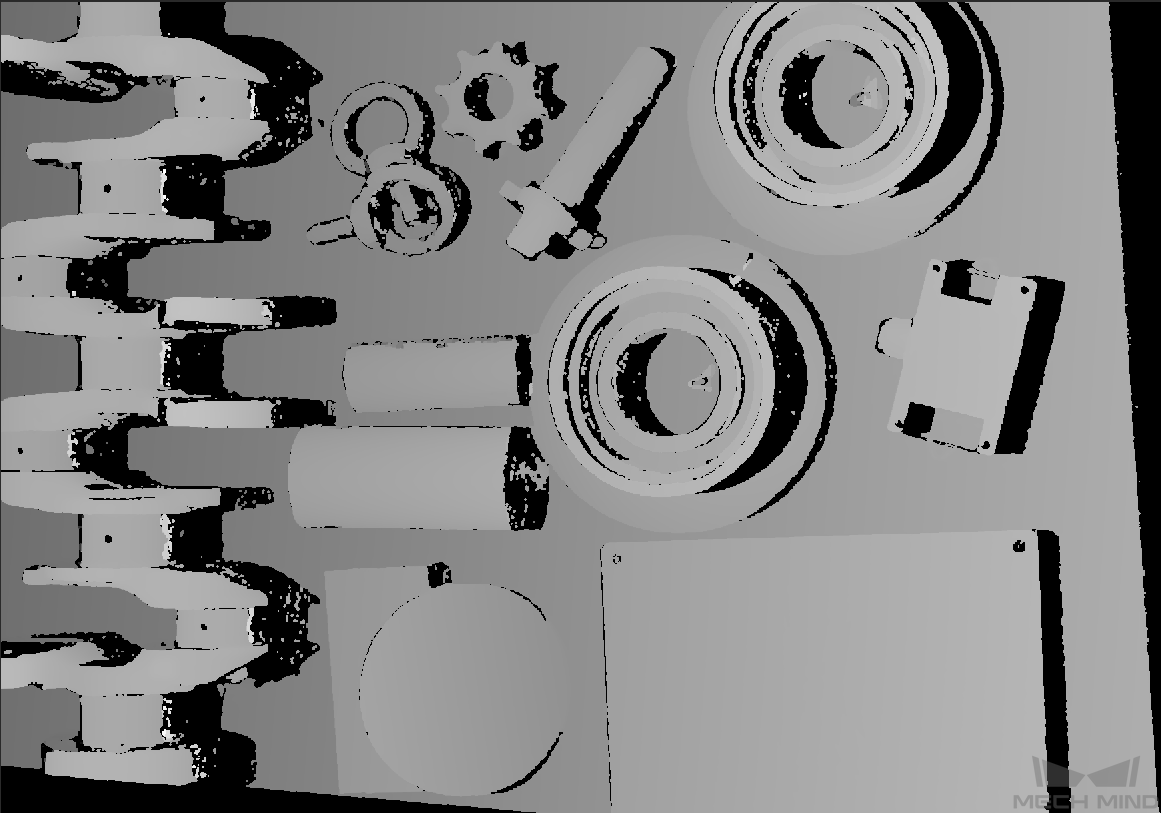
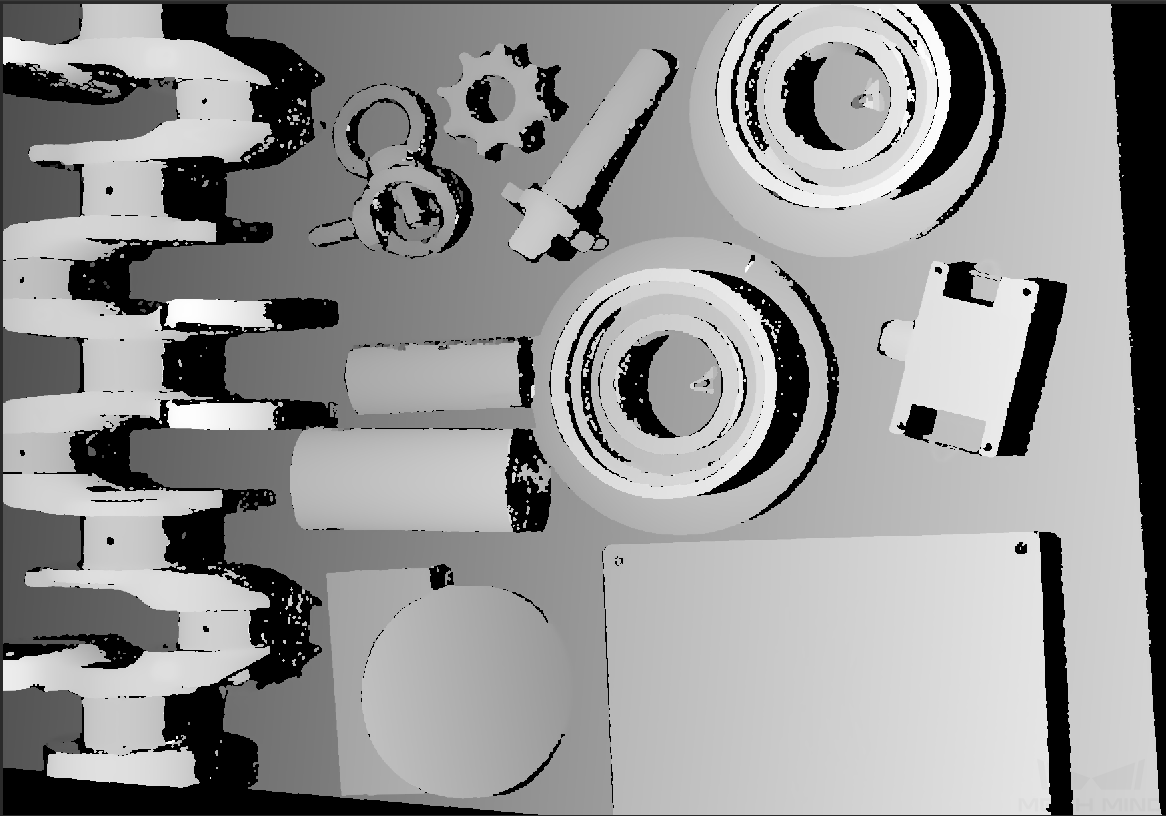
뎁스 측정 범위 수치가 다를 때의 이미지 대비:
범위가 과하게 큰 경우 |
범위가 적당한 경우 |
범위가 과하게 작은 경우 |
|

|
|
|
|
|
힌트
포인트 클라우드의 완전성을 위해 뎁스 측정 범위의 파라미터 수치는 적당히 조절해야 합니다. 범위가 매우 크면 노이즈가 나타날 것이며 매우 작으면 중요한 부분의 포인트 클라우드의 누락을 초래할 수 있습니다.
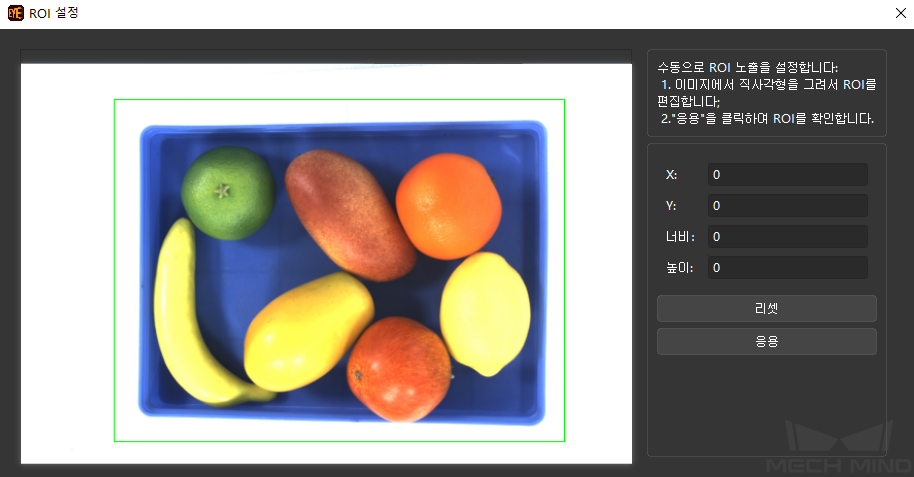
ROI 설정¶
이 도구를 통해 ROI 영역을 설정할 수 있으며 뎁스 맵과 포인트 클라우드를 조절할 수 있습니다. 편집 을 두번 클릭하여 ROI 설정 화면으로 들어가 이미지에서 ROI 영역을 선택하여 응용 을 클릭하면 됩니다. 리셋 을 클릭하여 다시 선택할 수 있습니다.
힌트
LSR L 카메라를 사용할 때 2D 맵의 휘도가 매우 낮거나 높으면 흑백 카메라 노출 모드 를 조절하십시오.