Kawasaki Calibration Program¶
This section introduces the process of calibrating the camera extrinsic parameters using the calibration program.
The process consists of 4 steps:
Before proceeding, please make sure that:
You have loaded the Standard Interface program onto the robot and can establish communcation with Mech-Center.
You are familiar with the contents in Hand-Eye Calibration Guide.
Note
This section is intended for scenarios where the communication between the robot and Mech-Center is established through Standard Interface, and calibration has to be performed frequently.
Select the Calibration Program¶
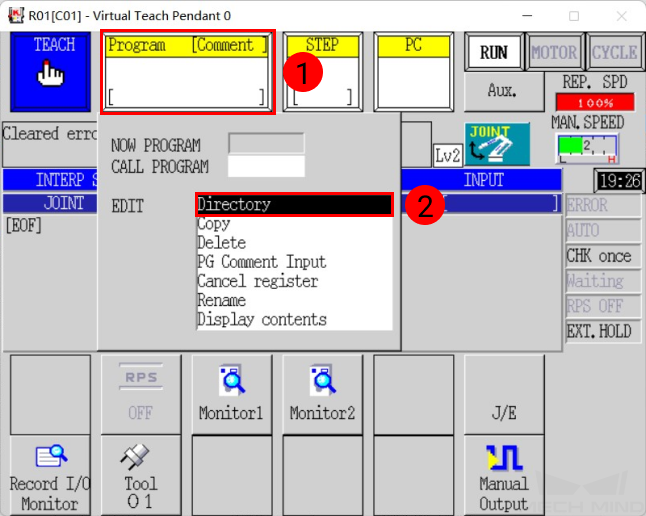
Switch the robot to teach mode, press on the Program area, and select Directory.
Note
To switch the robot to teach mode, turn the Teach/Repeat switch on the controller to TEACH, and the teach lock switch on the teach pendant to ON.
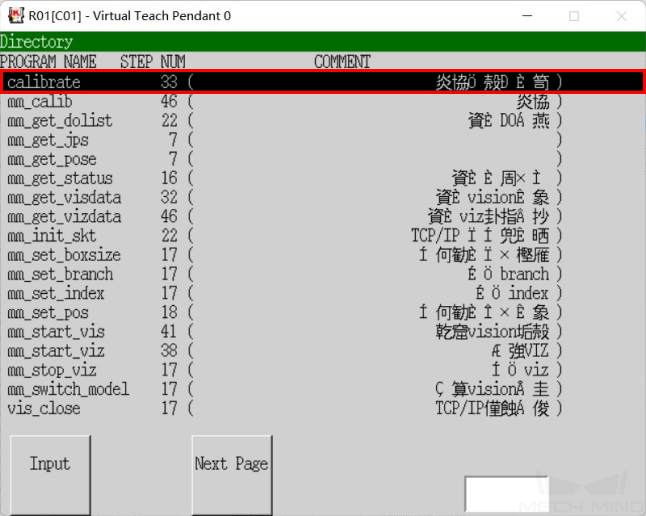
Select calibrate from the list, and press ENTER to confirm.
Teach the Calibration Start Point¶
Move the robot to the start point for the calibration.
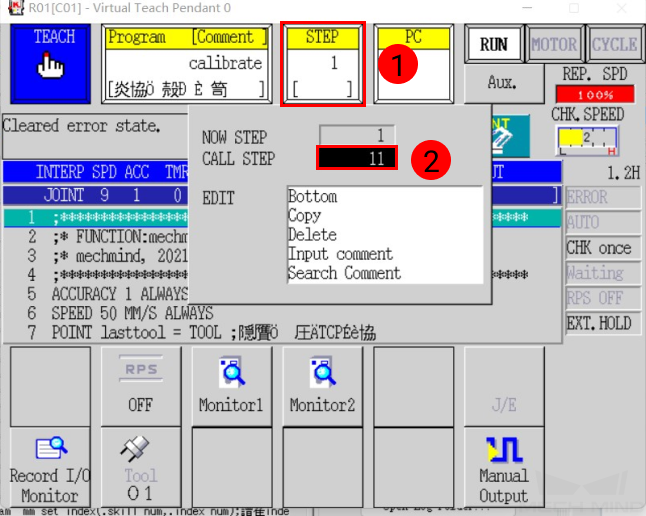
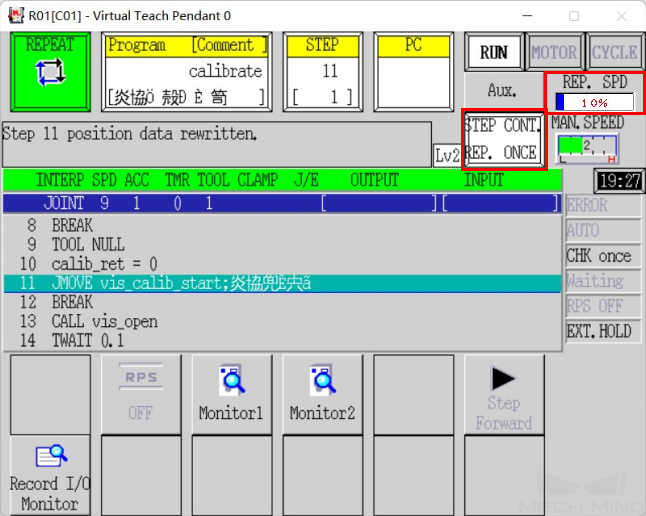
Press on the STEP area, enter 11 with the number key, and then press ENTER to confirm.
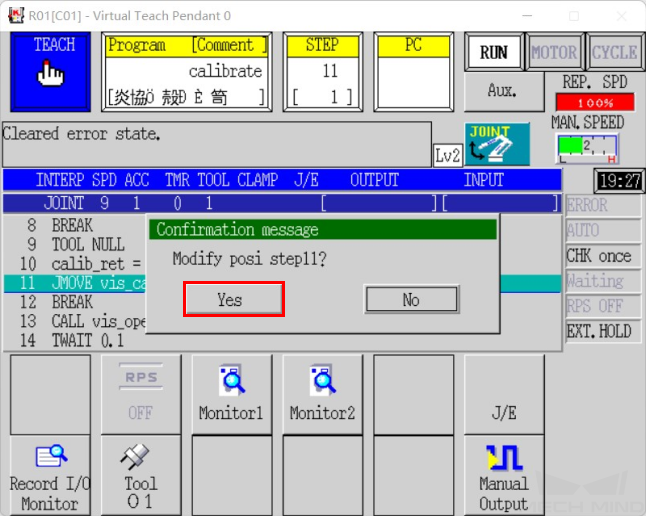
Press down the A key and POS MOD key at the same time, and press on Yes to modify the position in STEP 11.
Run the Calibration Program¶
Switch the robot to repeat mode, press on RPT. SPD to adjust the repeat speed to 10%. Press on the white button below Aux., and change the drop-down options to STEP CONT and REPEAT ONCE.
Note
To switch the robot to repeat mode, turn the Teach/Repeat switch on the controller to REPEAT, and the teach lock switch on the teach pendant to OFF.
Press on the STEP area, enter 1 with the number key, and then press ENTER to confirm.

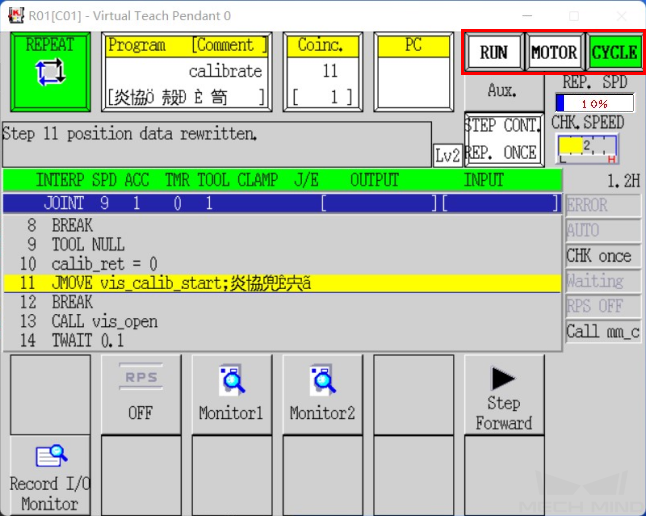
Press on MOTOR while holding down the A key to power the motor.
Press on CYCLE while holding down the A key to run the program.
If RUN does not turn green, press the RUN/HOLD key while holding down the A key.
Proceed to the next section when the following message is displayed in Mech-Center’s Log panel:
Entering the calibration process, please start the calibration in Mech-Vision
Start Calibration in Mech-Vision¶
In Mech-Vision, click on Camera Calibration (Standard) in the Toolbar, or select from the Menu Bar.
Follow the instructions in Mech-Vision to complete the following configuration:
Select Start a new calibration process;
Select the camera mounting method;
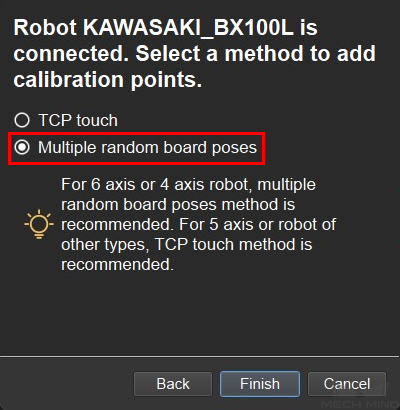
Select Multiple random board poses for adding calibration points.
Note
If after selecting the camera mounting method, the window says No robot is connected, the connection between the robot and Mech-Center is not properly established. Please re-run the robot program.
Follow the instructions in Mech-Vision to finish the calibration.
Note
In 5 Add Marker-Images and Poses after you click on Move Robot along Trajectory and Add Board Images, if the robot does not reach the next calibration point within 60 seconds, Mech-Vision will report a timeout error and stop the calibration process. In such cases, please select calibration in the program directory and run this program again, and restart the calibration process in Mech-Vision.