KUKA 프로그램 복제 프로세스 설명¶
이 부분에서는 다음 5개 단계를 포함한 KUKA 로봇 풀 컨트롤(완전한 컨트롤) 방법을 소개합니다.
컨트롤러 및 소프트웨어 버전 확인¶
KUKA 풀 컨트롤 프로그램은 컨트롤러 KR C4를 지원합니다.
KUKA 로봇의 시스텝 버전: KSS8.3 - KSS8.6.
KUKA 로봇 소프트웨어 패키지: Ethernet KRL (V2.2.8 및 이상 버전).
KSS8.6을 예시로 티칭 머신의 조작에 대해 설명하겠습니다.
네트워크 연결 설정¶
하드웨어 연결¶
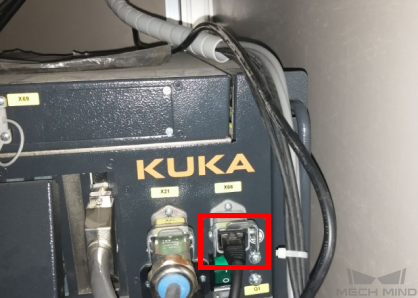
KR C4 Compact: x66 포트로 연결하십시오.
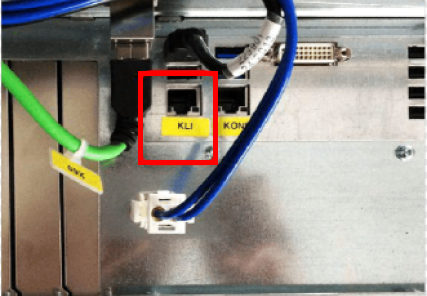
KR C4 기타 모델: KLI 포트로 연결하십시오.
IP 설정¶
전문가 로 전환하기:
을 순서대로 클릭하여 로그온 화면으로 들어갑니다.
전문가 를 클릭하고 암호를 입력하십시오(기본 암호:kuka). 입력한 다음에 로그온 을 클릭하십시오.

IP 설정:
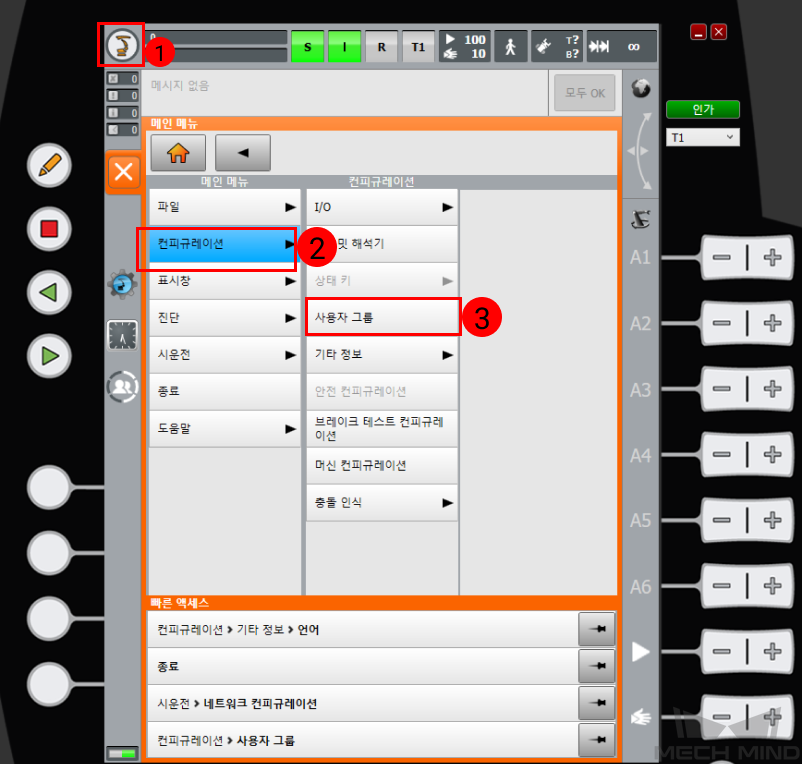
을 순서대로 클릭하여 네트워크 컨피규레이션 화면으로 들어갑니다.

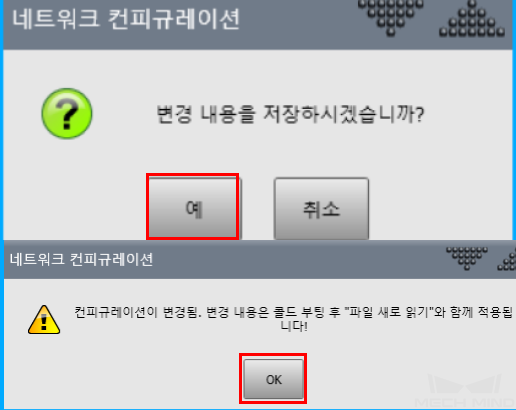
IP 주소(입력된 주소는 IPC의 주소와 같은 네트워크 세그먼트에 있어야 함)를 입력하고 저장 을 클릭하십시오. 팝업 창에서 예 와 OK 를 클릭하십시오.

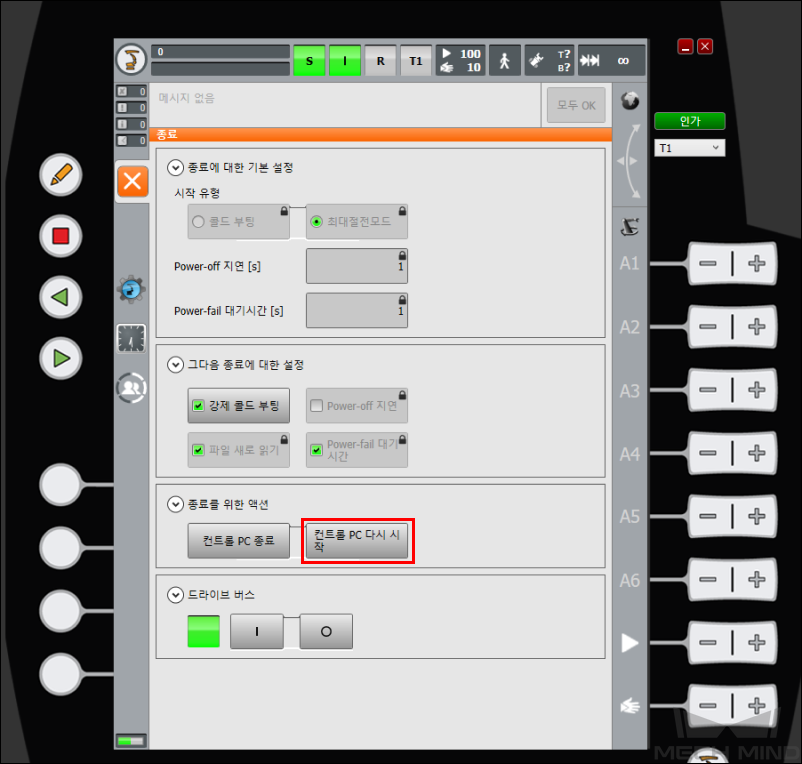
컨트롤 PC 다시 시작:
를 순서대로 클릭하여 종료 화면으로 들어갑니다.
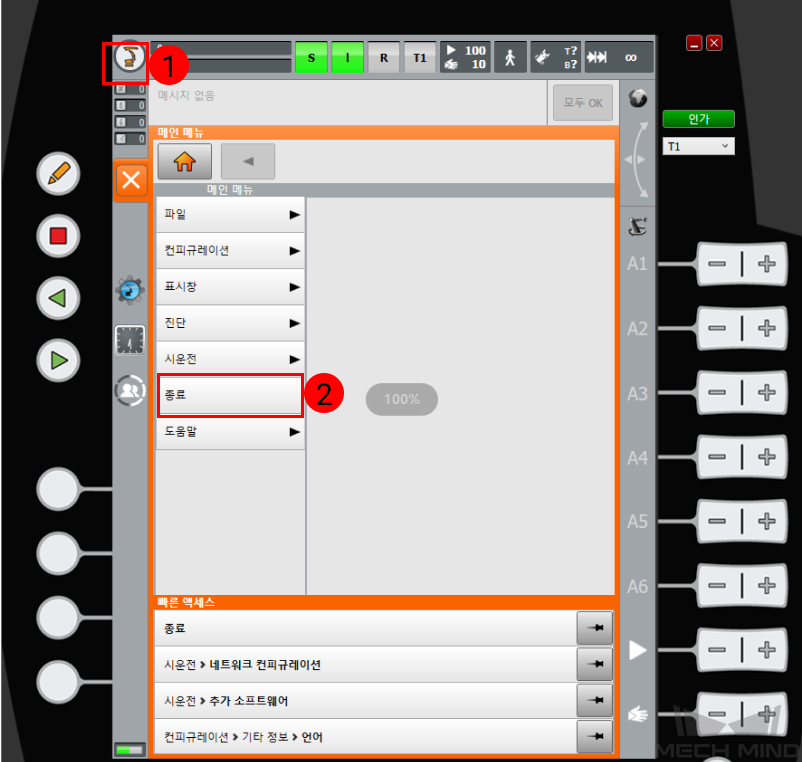
종료 화면에서 컨트롤 PC 다시 시작 을 클릭하십시오.
파일을 로봇에 복제하기¶
전문가 모드로 전환하기¶
위 내용을 참조하세요.
파일을 선택하기¶
힌트
복제 파일은 Mech-Center 설치 폴더에 있습니다.
XXX\\Mech-Center\\Mech_RobServ\\install_packages\\kuka\\kuka_new폴더에 있는 KUKA 프로그램 복제 파일을 USB에 복사합니다.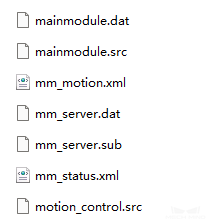
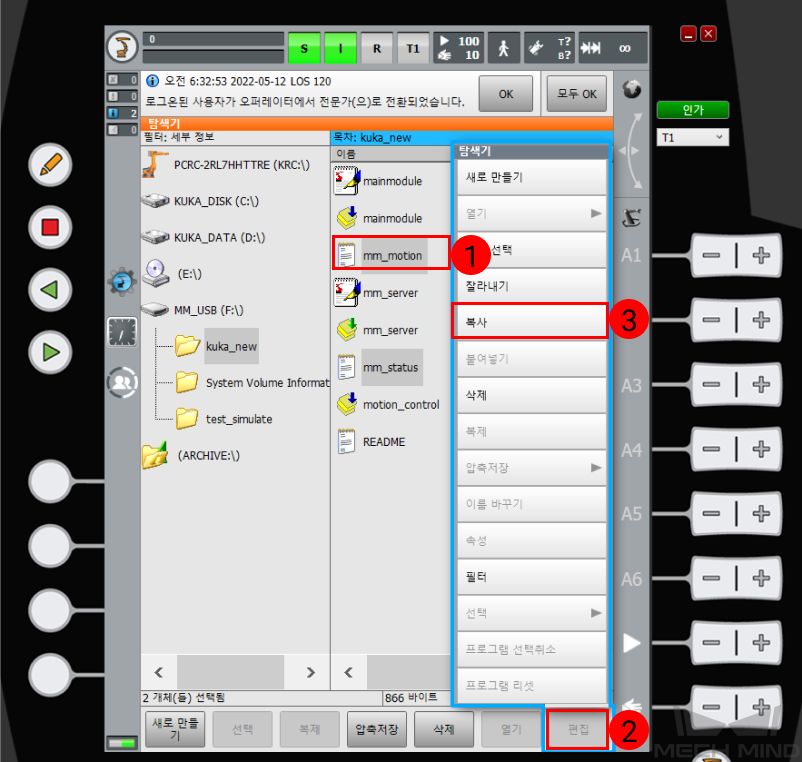
컨트롤러에 USB를 꽂은 다음에 티칭 머신 스크린 왼쪽의 USB를 클릭하여 복제할 파일이 있는 폴더를 찾습니다.
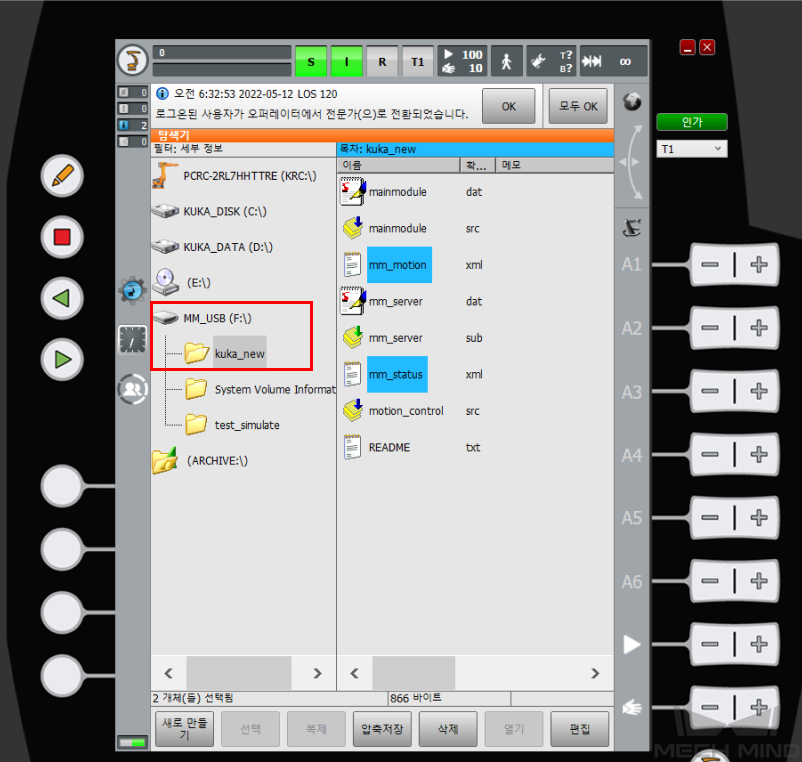
mm_motion 파일을 선택하고 편집 을 클릭합니다. 팝업된 메뉴 바에서 복사 를 클릭하십시오.
대상 폴더
C:\\KRC\\ROBOTER\\Config\\User\\Common\\EthernetKRL를 찾은 후 편집 을 클릭하여 팝업된 메뉴 바에서 붙여넣기 를 클릭하십시오. 같은 방식으로 mm_status 파일을 이 대상 폴더로 복제할 수 있습니다.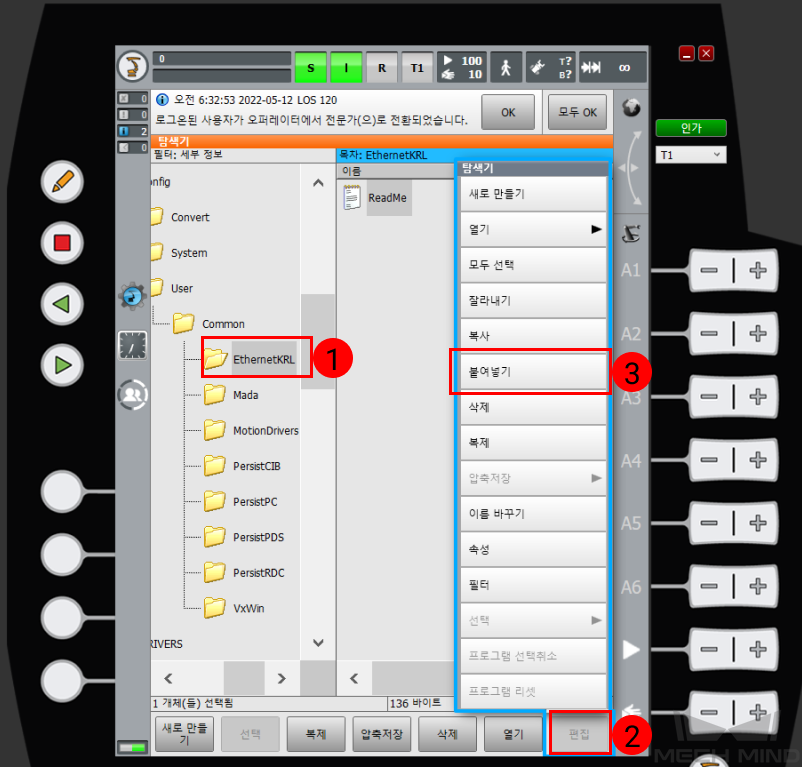
위 설명을 참조하여 나머지 5개 파일을 R1 폴더에 있는 mechmind 폴더로 복사하십시오. mechmind 폴더가 없으면 먼저 새로 만드세요.
힌트
티칭 머신 스크린을 길게 누르면 파일 여러 개를 선택할 수 있습니다.
mechmind 폴더를 만들기:
R1 폴더를 클릭한 후 새로 만들기 를 클릭합니다.
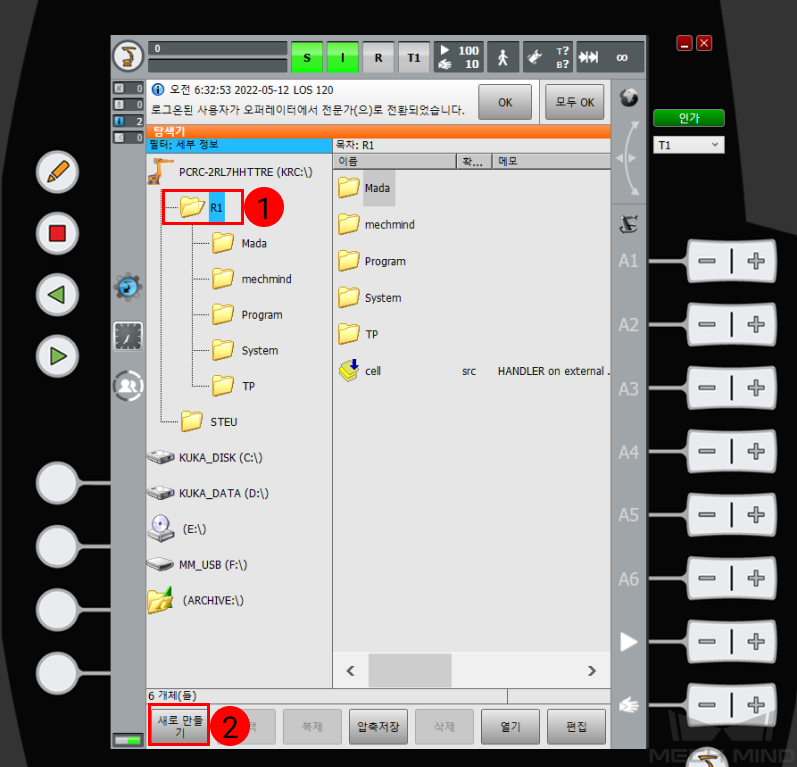
팝업창에서 mechmind 를 입력하고 OK 를 클릭하여 mechmind 폴더를 새로 만들 수 있습니다.


프로그램 선택¶
백그라운드 프로그램 자동 시작 설정¶
위 내용을 참조하여 전문가 모드로 전환하십시오.
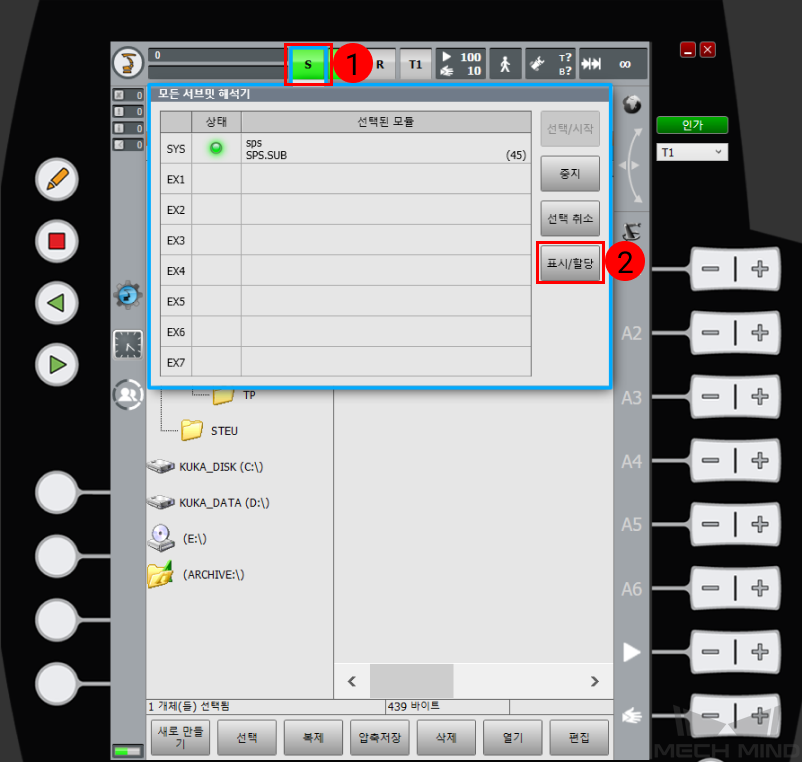
티칭 머신 화면 상단에 있는 S 를 클릭한 뒤 표시/할당 을 클릭하십시오.
콜드 부팅 설정 을 클릭하여 콜드 부팅 설정 화면으로 들어갑니다.
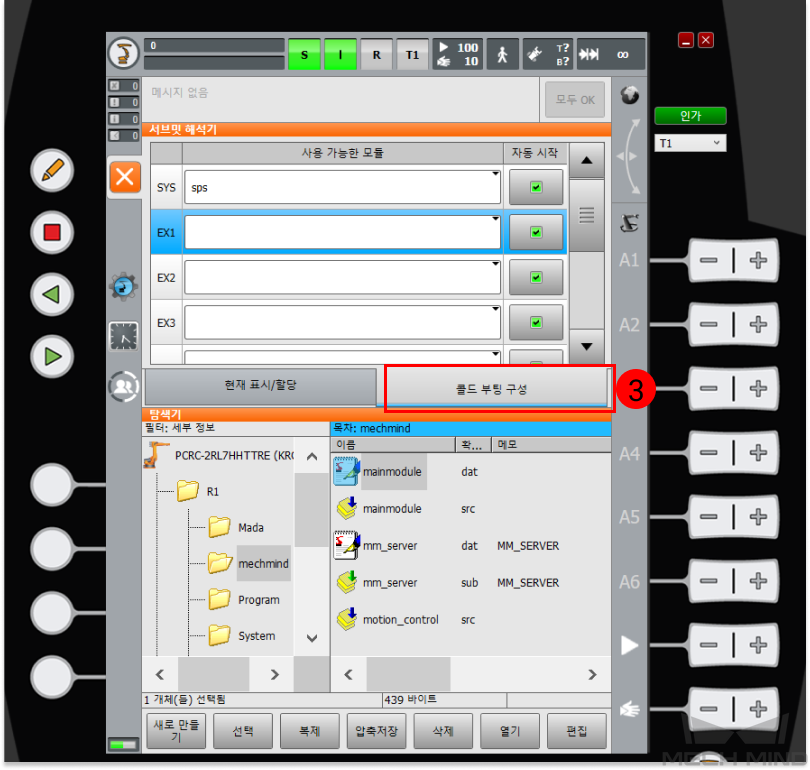
SYS 오른쪽의 선택 박스를 클릭하여 팝업된 풀다운 메뉴에서 여백 을 선택합니다.

다음으로 오른쪽에 있는 자동 시작 의 체크 박스를 클릭하여 자동 시작을 언체크 하십시오.

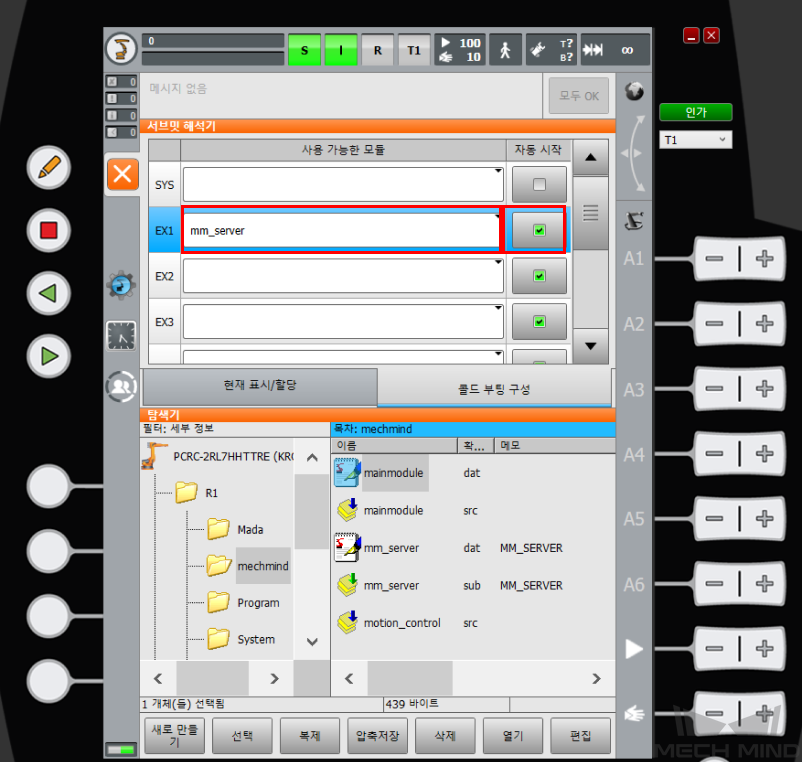
위 설명을 참조하여 EX1 오른쪽의 선택 박스를 클릭하여 팝업된 풀다운 메뉴에서 mm_server를 선택하며 자동 시작을 선택하세요.
현재 표시/할당 을 클릭하여 현재의 표시/할당 화면으로 전환하고 SYS를 클릭하며 선택 취소 를 클릭하십시오.
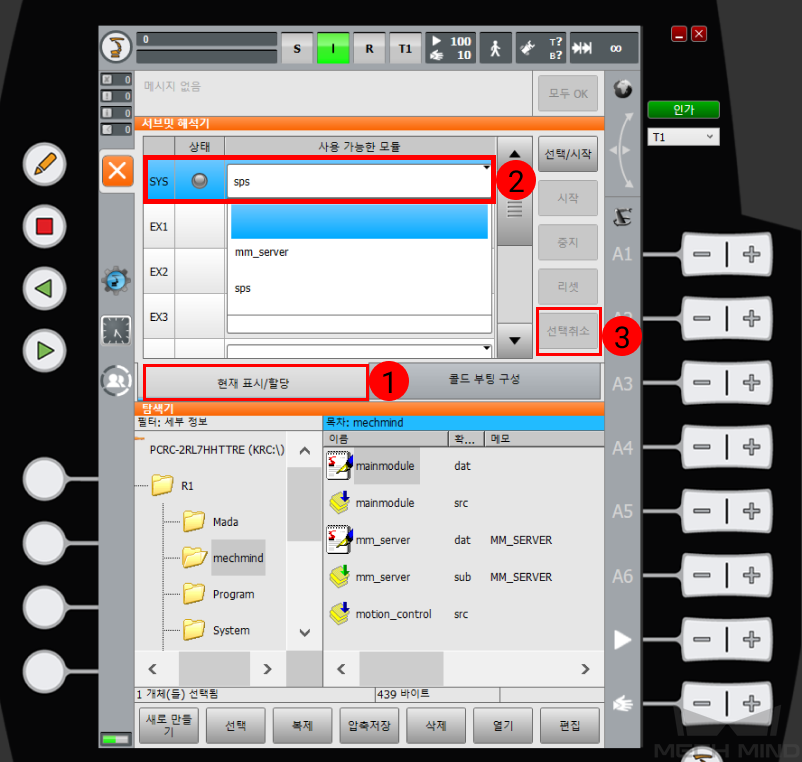
SYS 오른쪽의 선택 박스를 클릭하여 팝업된 풀다운 메뉴에서 여백을 선택합니다.

EX1 오른쪽의 선택 박스를 클릭하여 팝업된 풀다운 메뉴에서 mm_server를 선택한 후 선택/시작 을 클릭합니다.


Aut 자동 모드 실행으로 전환하기¶
실행 방식을 전환하는 방법: 티칭 머신의 연결 관리자 스위치를 수평 방향으로 돌리고 팝업된 모드 선택 대화 상자에서 T1 또는 AUT를 선택한 다음 연결 관리자의 스위치를 초기 위치로 다시 돌려 머신의 작동 모드를 전환할 수 있습니다.

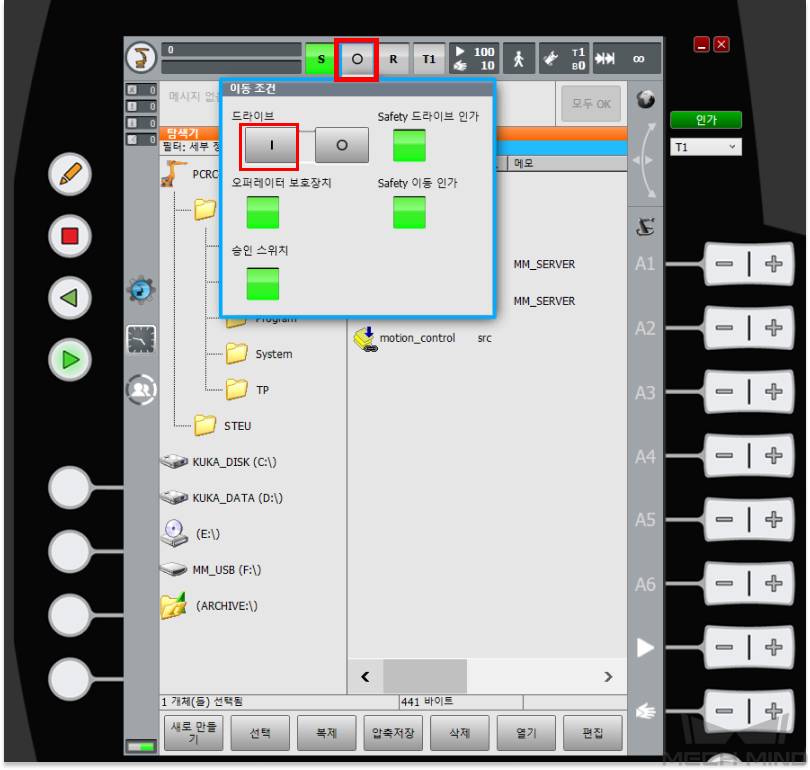
위 설명을 참조하여 T1 모드로 전환하세요. O 를 클릭하고 팝업 창에서 I 를 클릭하여 드라이브 상태를 바꿉니다. 드라이브 상태가 원래 I 인 경우 이 스텝을 진행하지 않습니다.
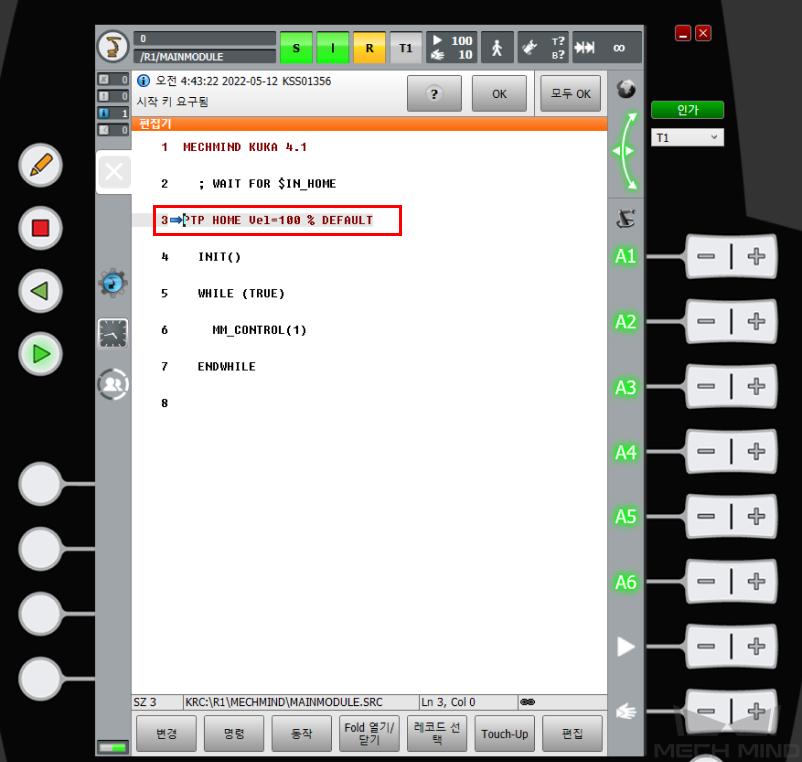
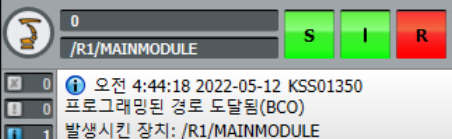
적절한 실행 속도를 설정하고 로봇의 운동 추세를 관찰해야 합니다. 티칭 머신 뒷면에 있는 횐색 활성화 키 및 앞면에 있는 녹색 실행 키 를 눌러 로봇이 home 포인트로 돌아가여 스크린에서 프로그래밍된 경로 도달됨(BCO) 알림이 나타나기 전에 활성화 키 및 실행 키 를 계속 눌러야 합니다.
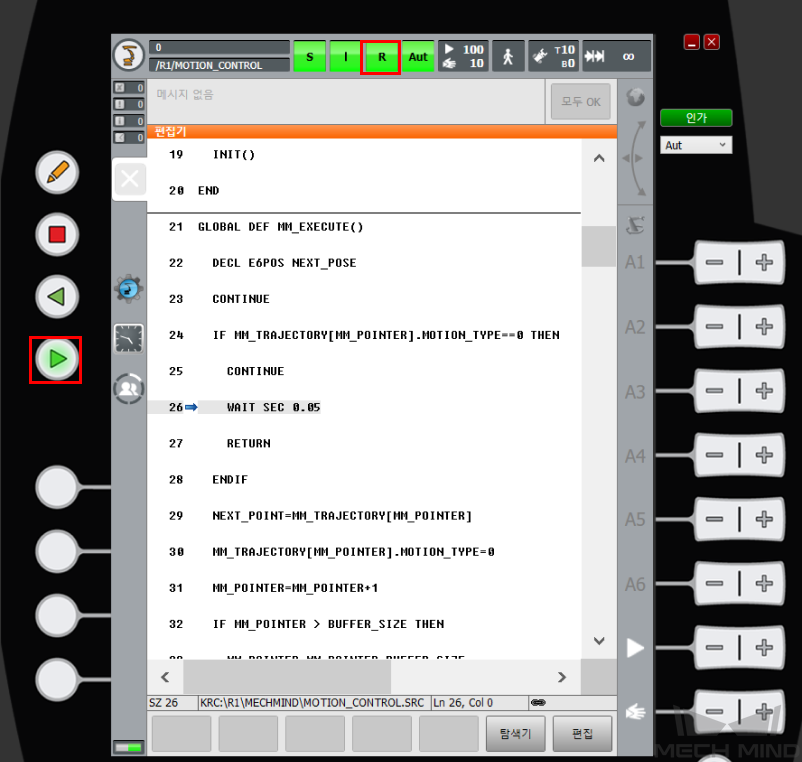
위 설명을 참조하여 AUT 모드로 전환하고 시작 버튼을 눌러 프로그램을 시작할 수 있습니다(R가 녹색으로 표시되면 프로그램이 이미 시작되었음을 의미함).
로봇 연결 상태 테스트¶
로봇 연결 상태 테스트 내용을 참조하세요.
연결 끊길 때의 해결 방법¶
사용 중에 Mech-Center 연결이 끊길 때 자동으로 다시 연결될 것입니다. 로봇은 계속 연결되지 못하는 경우 백그라운드 프로그램을 다시 부팅해 볼 수 있습니다. 다시 부팅하는 방법은 다음과 같습니다: S 를 클릭하여 mm_server를 선택한 후에 선택 취소 를 클릭합니다. 다음으로 산택/시작 을 클릭합니다. 오류 알림이 나타나면 메시지 표시줄에 있는 모두 OK 를 클릭하면 됩니다.
