ABB 프로그램 복제 프로세스 설명¶
이 부분에서는 다음 4개 단계를 포함한 ABB 로봇 풀 컨트롤(완전한 컨트롤) 방법을 소개합니다.
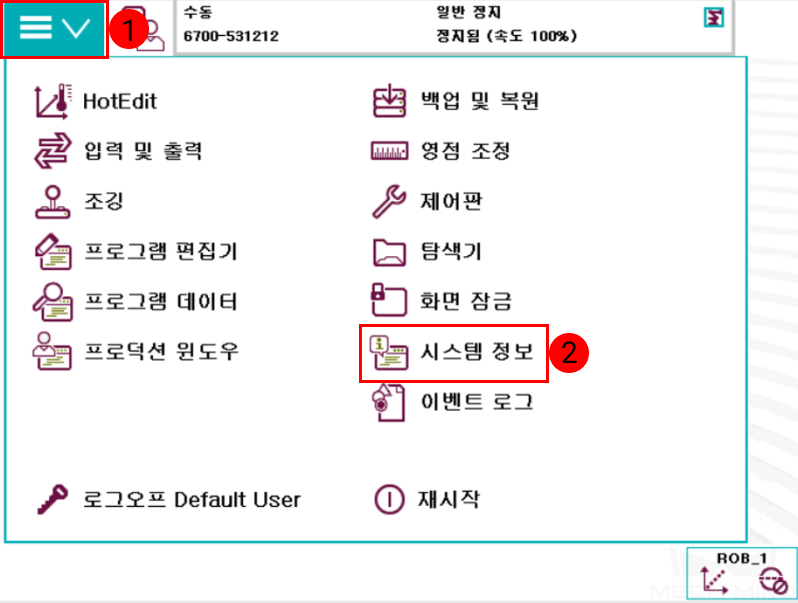
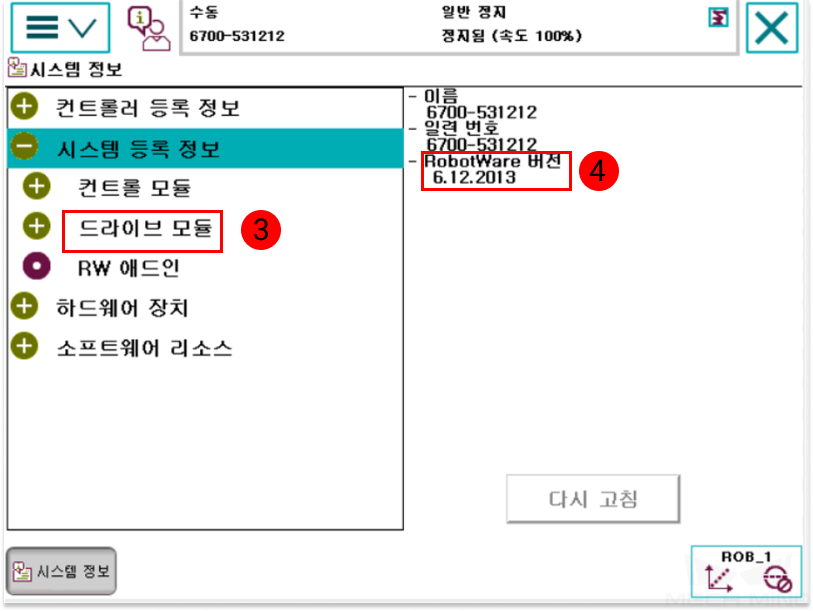
컨트롤러 및 소프트웨어 버전 확인¶
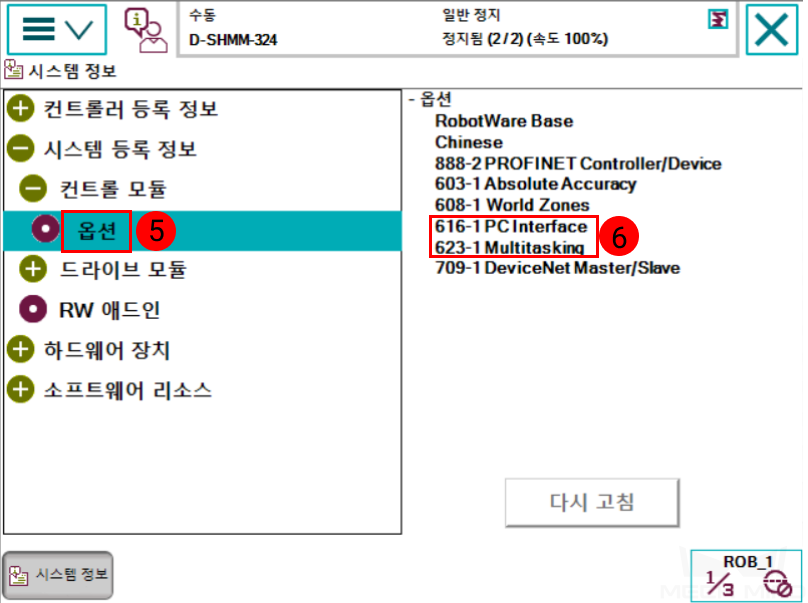
RobotWare 버전은 6.02 이상이며 다음 두 가지 옵션을 선택할 수 있습니다.
623-1 Multitasking
616-1 PCInterface
RobotWare 버전을 확인하려면 다음과 같이 진행하십시오.
옵션 패키지가 설치되어 있는지 확인하십시오.
네트워크 연결 설정¶

IP 설정¶
사용자는 티칭 머신 또는 RobotStudio 에서 IP 설정을 완료할 수 있습니다.
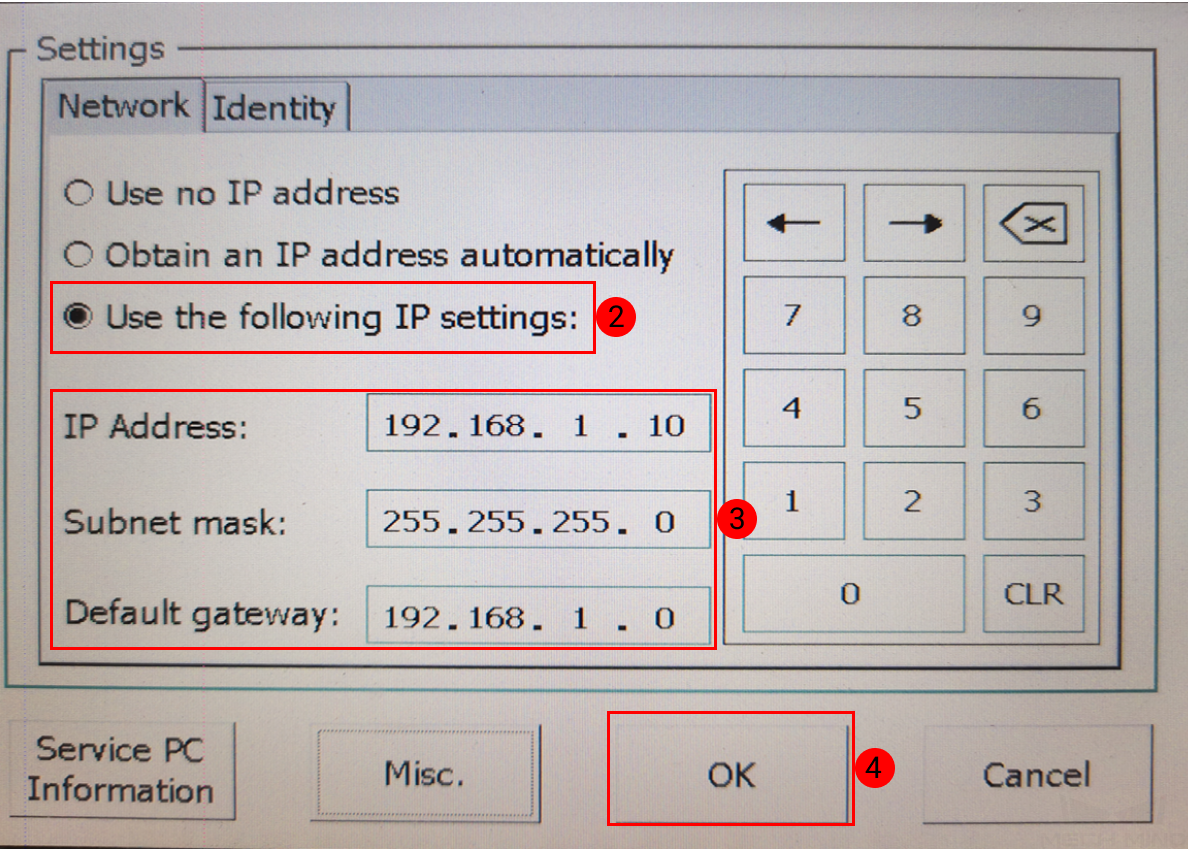
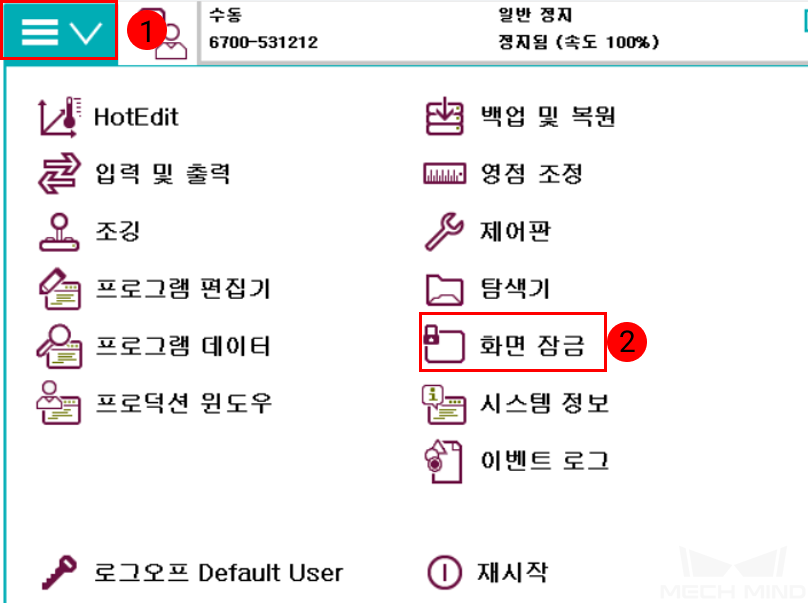
티칭 머신 IP 설정:
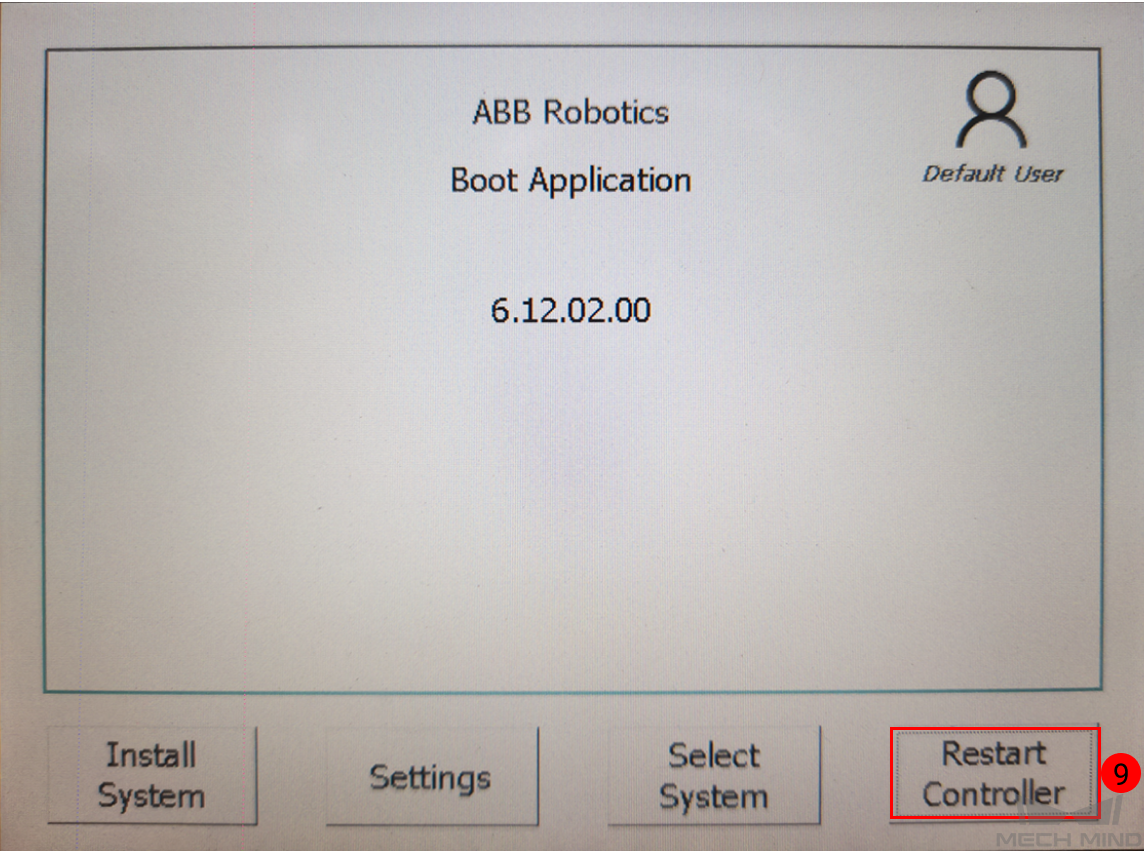
아래 그림과 같이 설정하십시오.
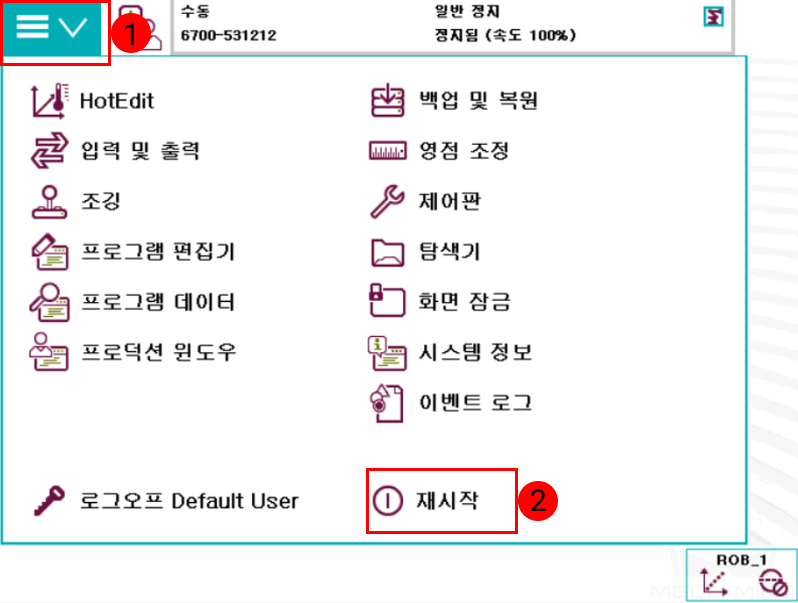
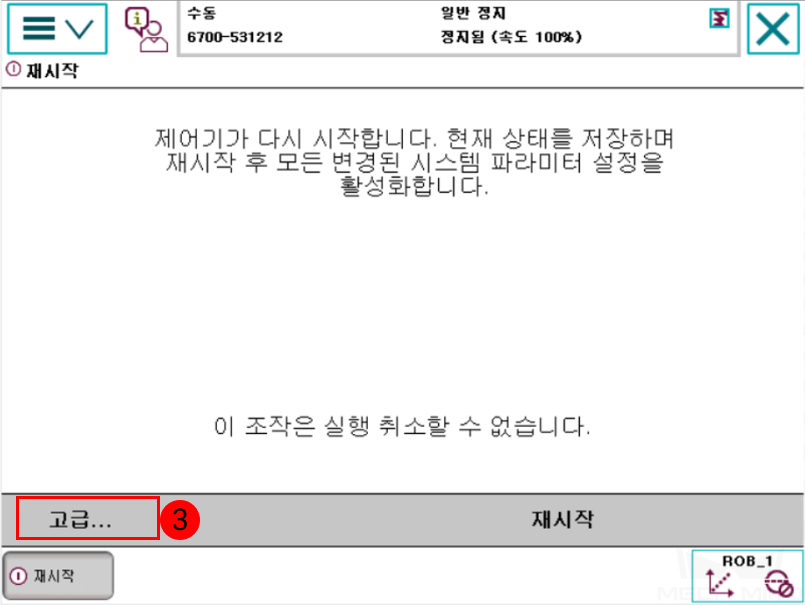

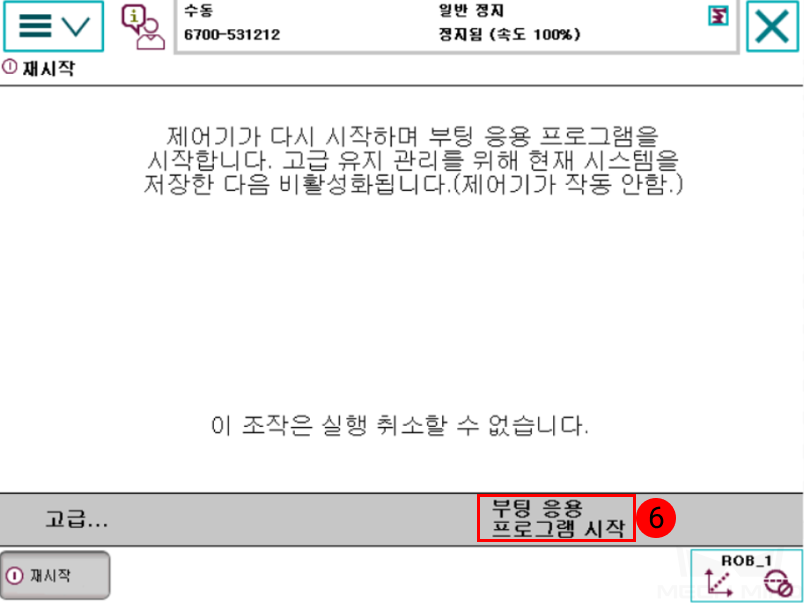
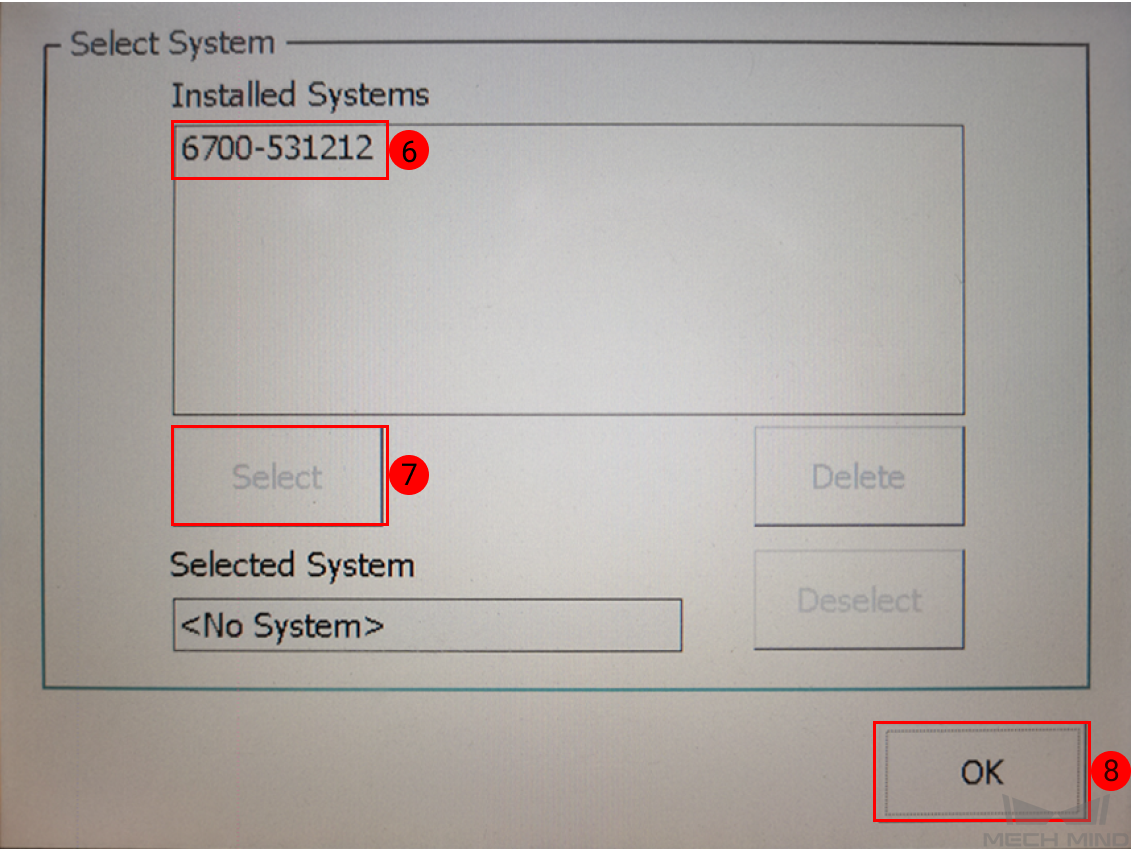
다시 시작한 후 다음 인터페이스로 들어가 아래 스텝에 따라 IP 설정을 완료하십시오. 로봇과 IPC의 IP는 동일한 네트워크 세그먼트에 있어야 합니다.



Robotstudio IP 설정 :
아래 그림과 같이 IP를 설정하고 설정이 완료된 후 로봇을 다시 작동합니다.
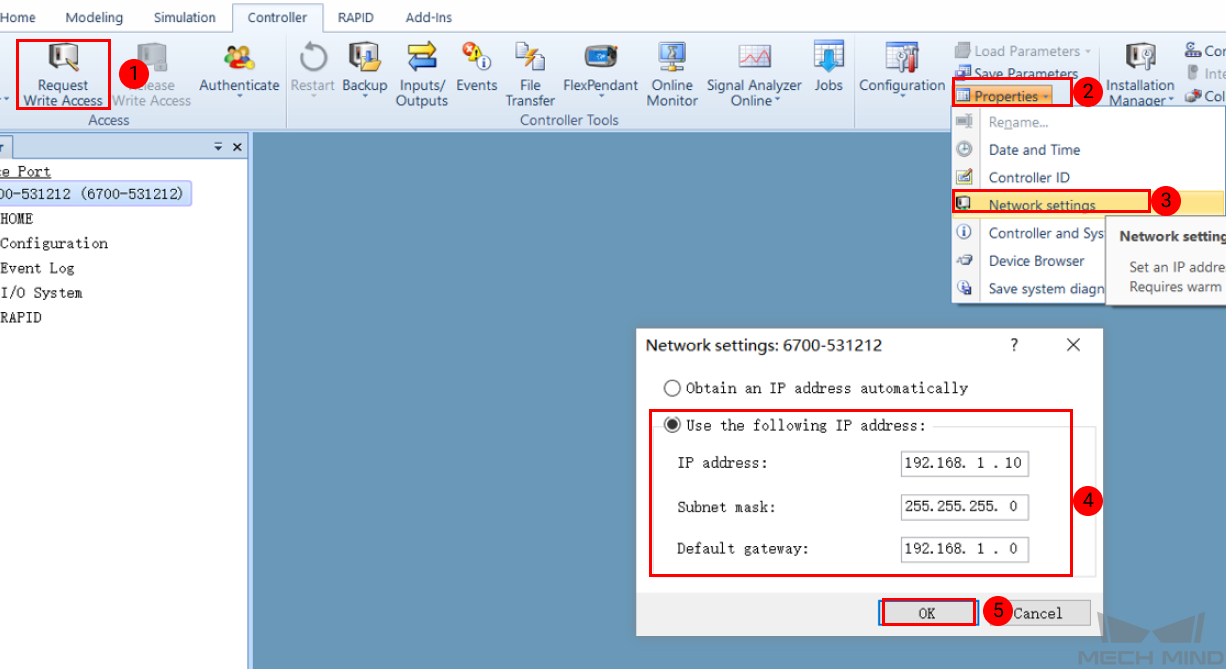
IP가 성공적으로 변경되었는지 확인하십시오.

파일을 로봇에 복제하기¶
사전 준비¶
힌트
복제 파일은 Mech-Center 설치 폴더에 있습니다.
XXX\Mech-Center\Mech_RobServ\install_packages\abb\server on ABB 폴더에 있는 파일을 USB에 복사합니다.
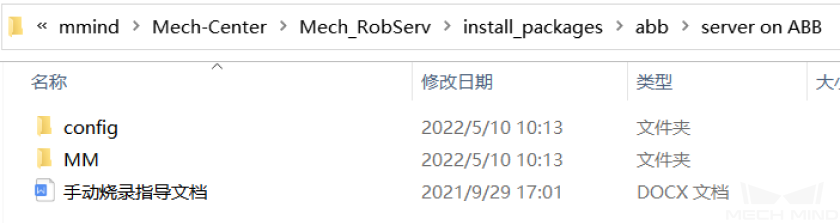
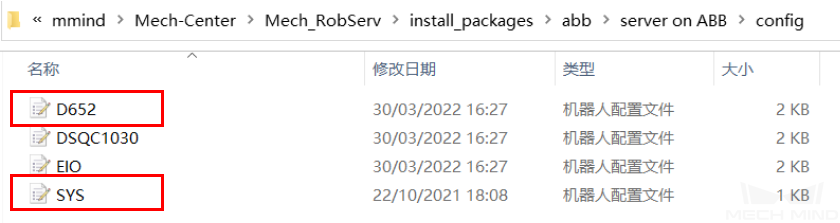
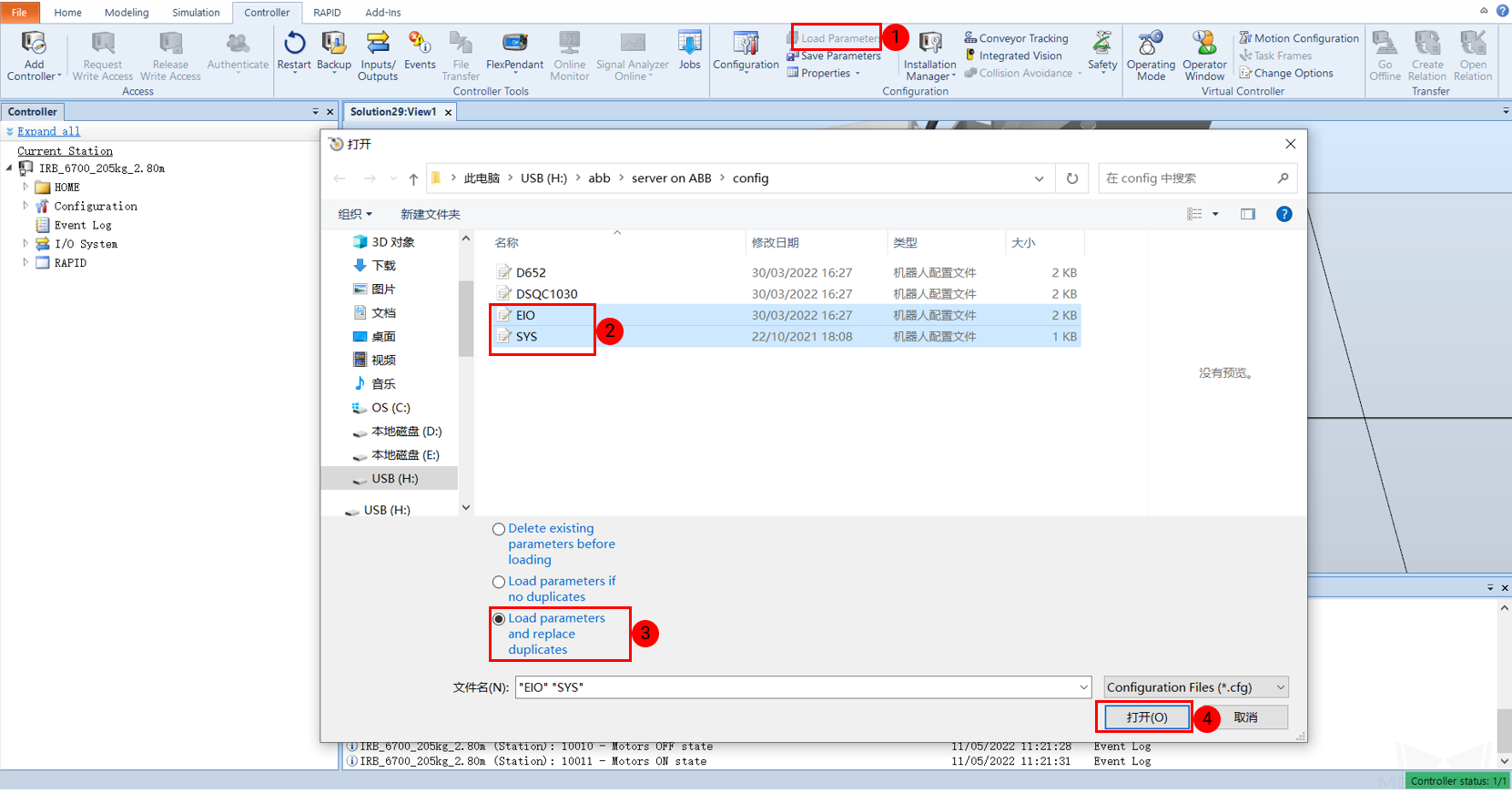
Config 폴더에 있는 파일은 로봇 구성 파일로 실제 상황에 따라 다른 구성 파일을 도입해야 합니다.
작업 현장에서 652 보드(PCB)를 사용하는 경우 D652.cfg, SYS.cfg를 선택하십시오.
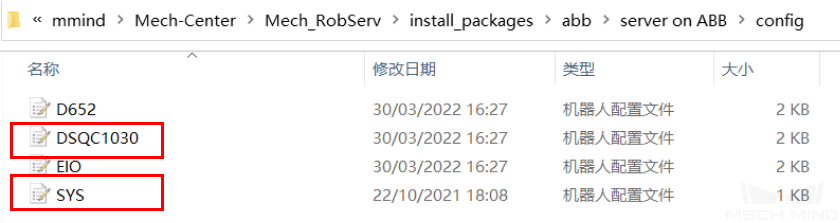
작업 현장에서 1030 보드(PCB)를 사용하는 경우 DSQC1030.cfg, SYS.cfg를 선택하십시오.
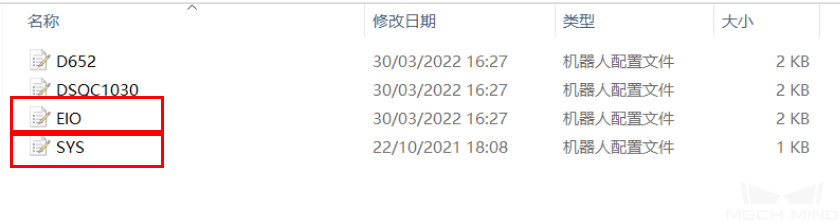
자동 캘리브레이션만 필요한 경우 또는 작업 현장에서 위의 두 보드(PCB)가 아닌 보드를 사용하는 경우 EIO.cfg, SYS.cfg를 선택하십시오.
MM 폴더에 있는 파일은 로봇 프로그램 모듈입니다.

복제 시작¶
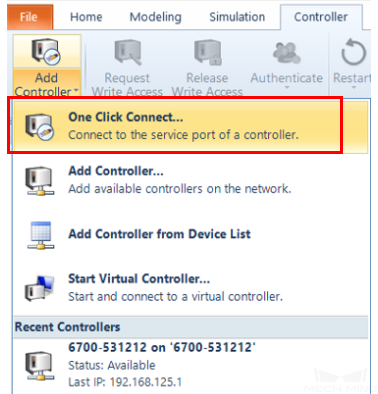
RobotStudio를 열고 컨트롤러를 연결합니다.
IPC의 네트워크 케이블이 로봇 컨트롤러의 LAN 포트에 꽂혀 있으면 One Click Connect 를 클릭합니다.
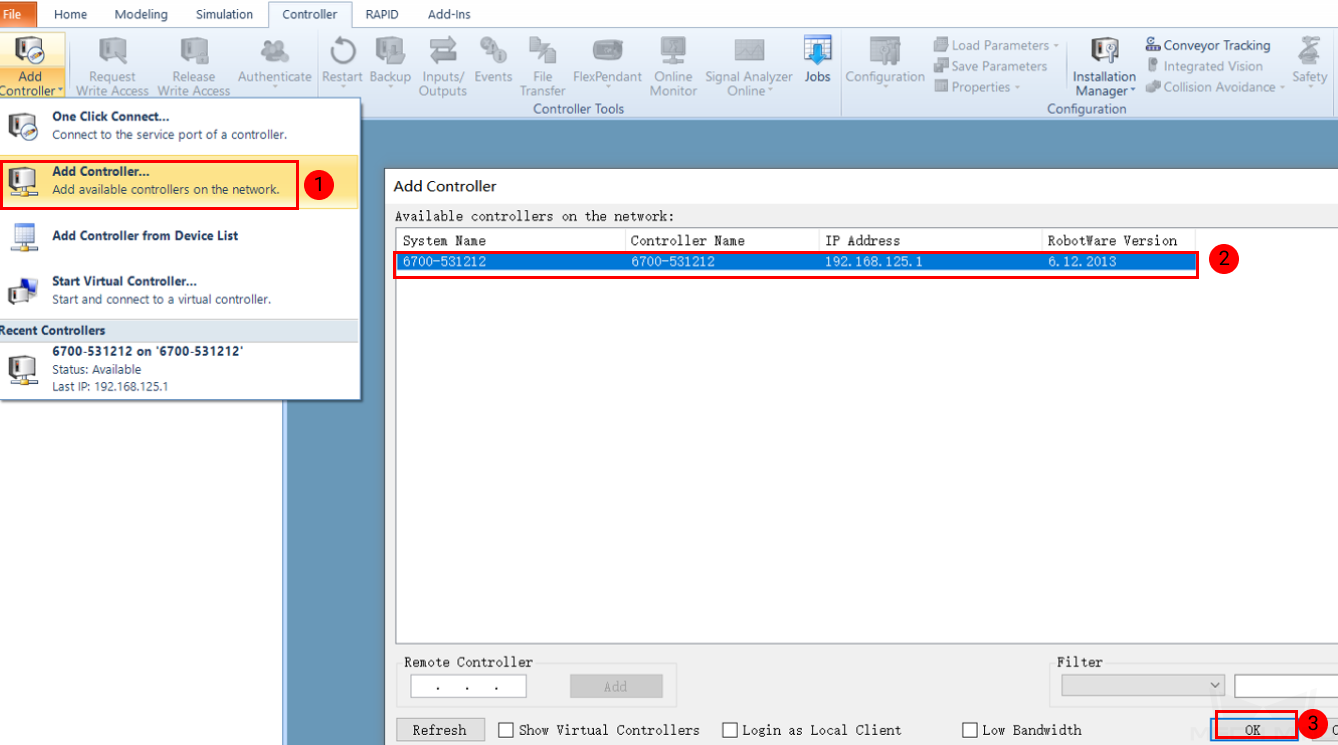
스위치를 통하거나 로봇 컨트롤러의 X6 네트워크 포트(WAN 포트)에 직접 연결된 경우 아래 그림과 같이 컨트롤러를 추가합니다. 컨트롤러가 추가되면 컨트롤러 관리 포트에 자동으로 연결됩니다.
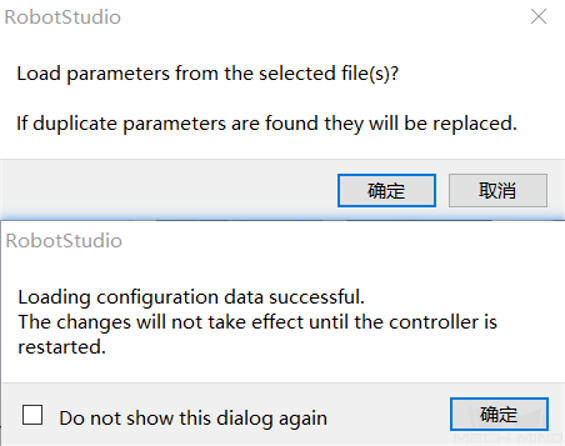
구성 파일을 아래 그림과 같이 도입하고 팝업창에서 각각 确定 을 클릭합니다.
아래 그림과 같이
XXX\Mech-Center\Mech_RobServ\install_packages\abb\server on ABB아래의 MM 폴더를 로봇 시스템의 HOME 경로에 복사합니다.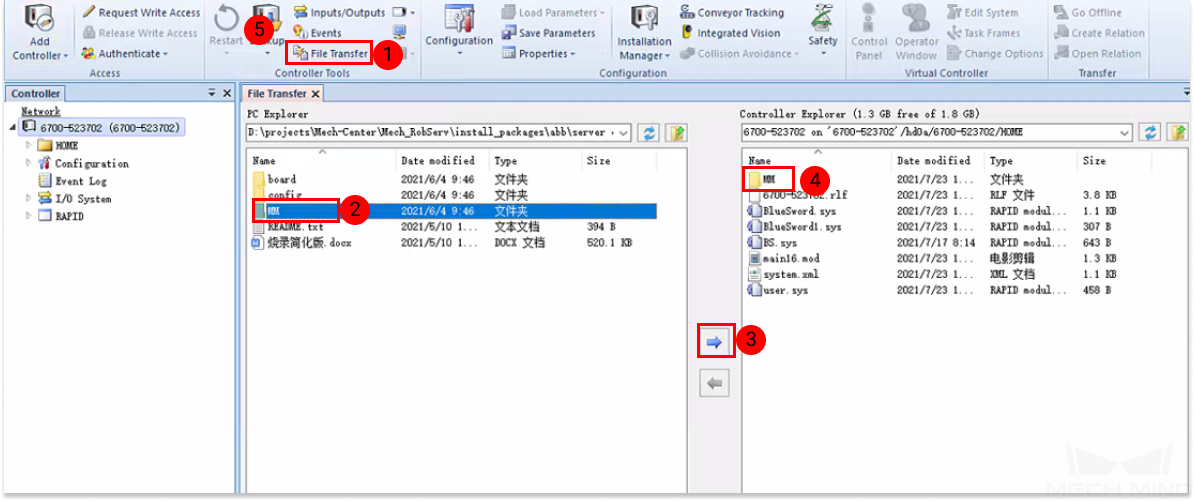
safe_area.mod 프로그램에서 안전 영역 범위를 mm 단위로 수정합니다.

프로그램 실행¶
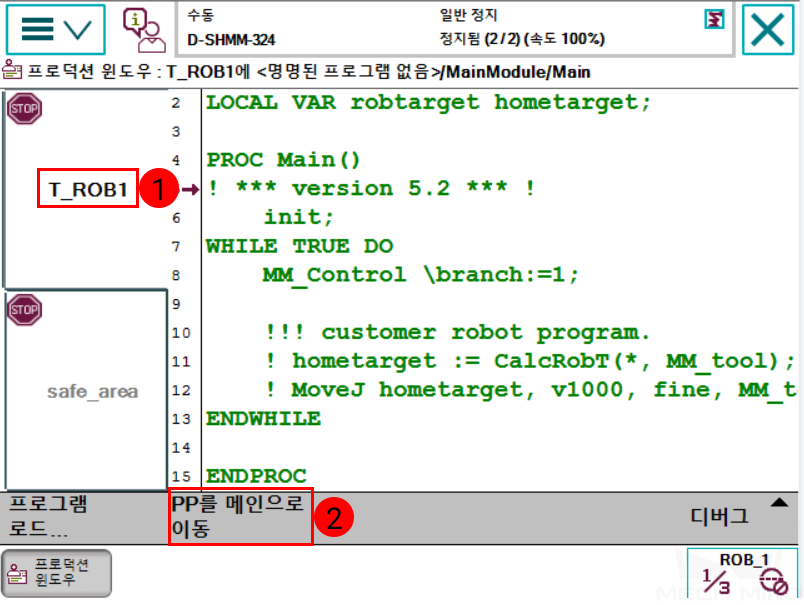
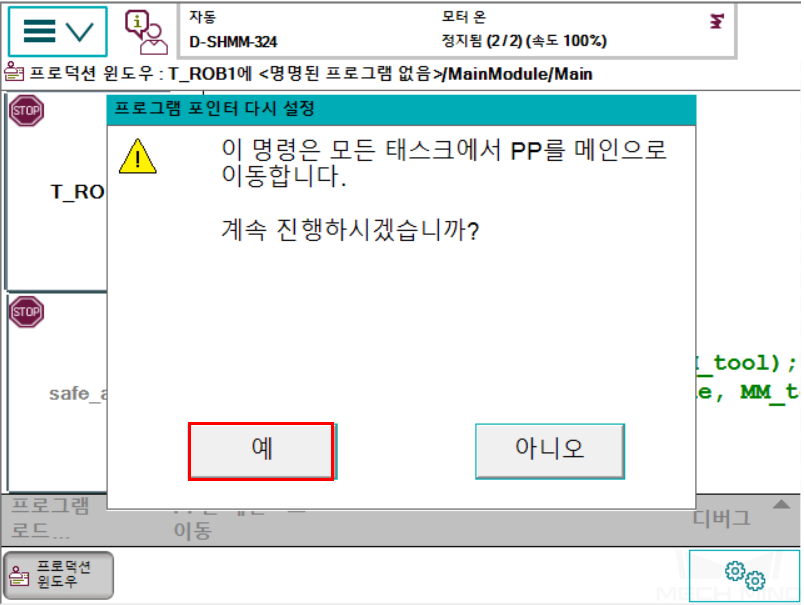
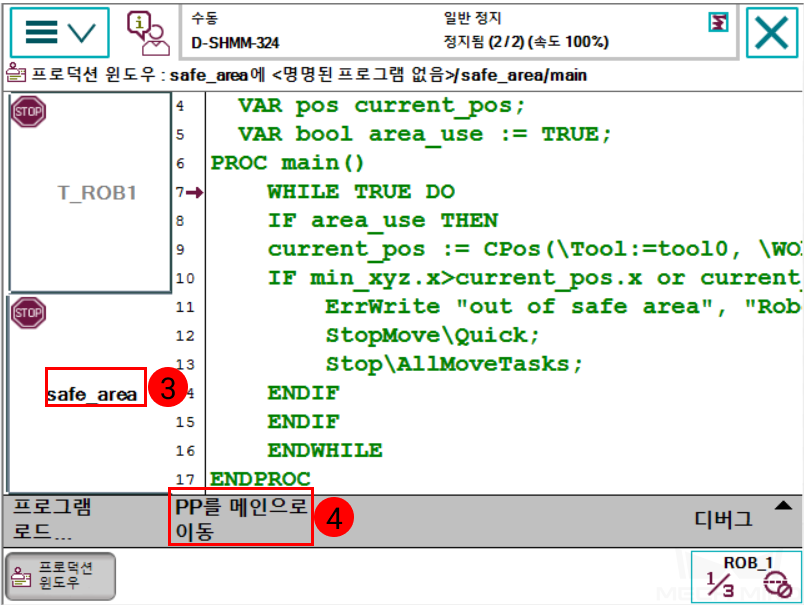
T_ROB1 및 safe_area 두개 task의 프로그램 포인터를 각각 메인 프로그램으로 이동하고 PP를 메인으로 이동 을 클릭하고 팝업 프롬프트 상자에서 예 를 클릭합니다.
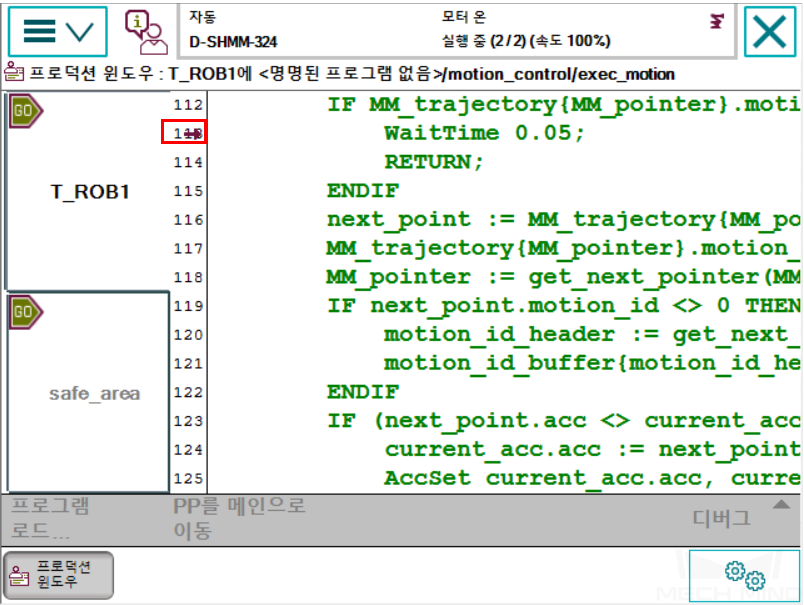
프로그램을 수동 또는 자동으로 실행하기 위한 프로그램 포인터는 아래 그림과 같습니다.
로봇 연결 상태 테스트¶
로봇 연결 상태 테스트 를 참조하세요.