카메라에서 이미지를 캡처하기¶
기능 설명
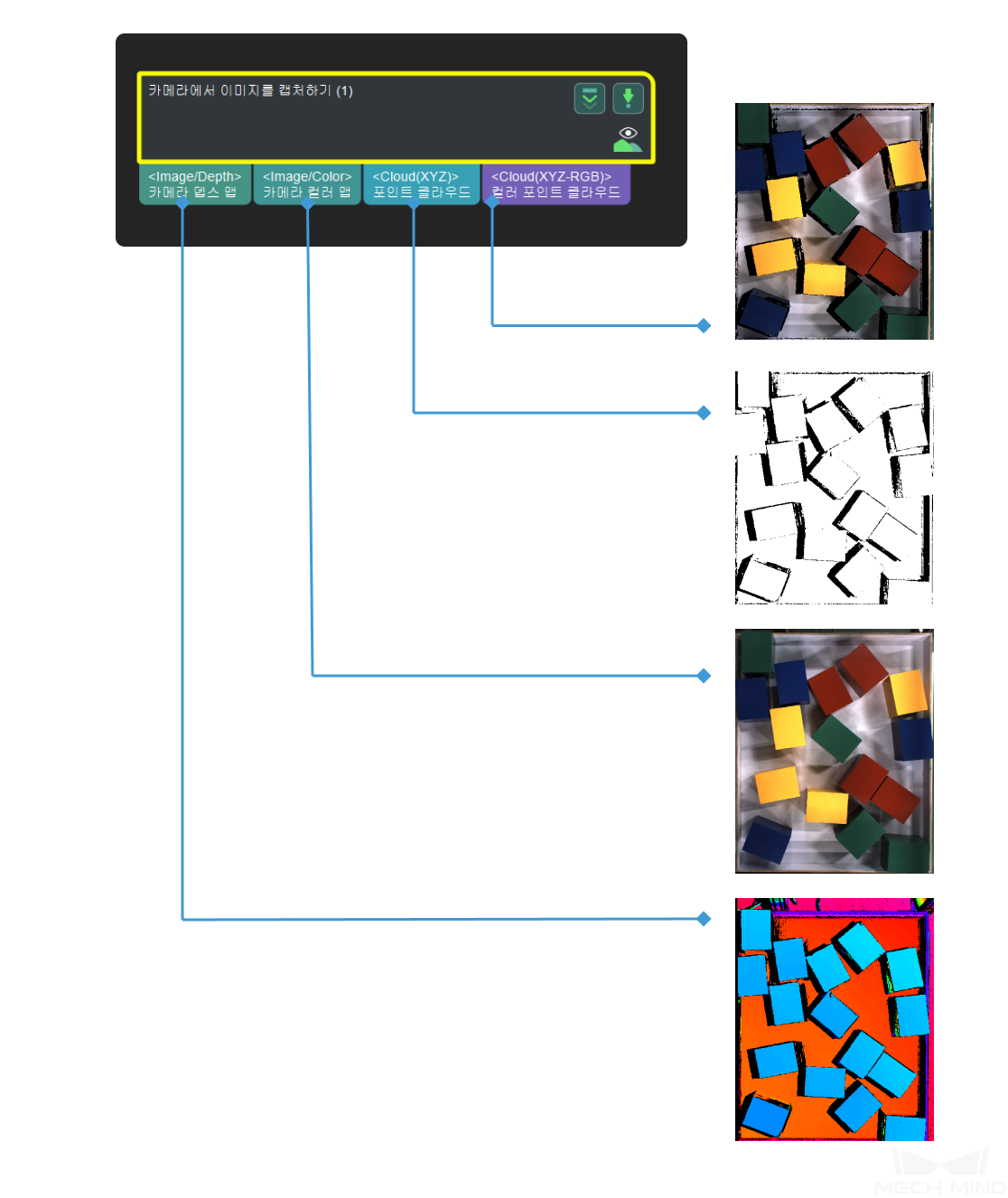
실제 혹은 가상 카메라를 통해 컬러 맵, 뎁스 맵과 포인트 클라우드를 획득합니다.
응용 시나리오
일반적으로 한 프로젝트의 시작 입력으로 Mech-Eye 산업용 3D 카메라 혹은 제3자 카메라를 통해 데이터를 캡처하거나 가상 카메라의 실뮤레이션 데이터 소스를 사용합니다.
입력 및 출력
파라미터 설명
카메라 유형
기본값:MechEye값 리스트:MechEye, VirtualCamera,External2D설명: 실제 카메라를 연결할 때 MechEye를 선택하고 가상 카메라를 사용할 때 VirtualCamera를 선택하세요.MechEye
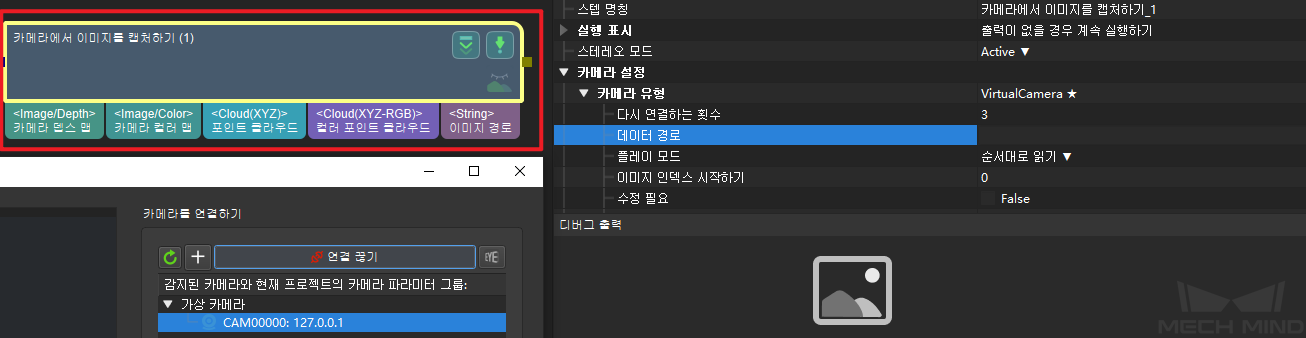
카메라 ID
기본값:CAM00000설명: open an editor 를 클릭하고 “카메라 연결 도우미” 화면으로 들어가 원하는 카메라를 선택하고 연결시킵니다.성공적으로 연결된 후 기본 카메라의 파라미터 그룹을 획득하기 를 클릭하여 카메라의 내/외부 파라미터(이전에 이미 획득한 경우에 다시 획득할 필요사 없음)를 획득합니다. 연결된 다음에 Mech-Eye Viewer 인터페이스가 활성화될 것입니다.카메라 파라미터 그룹 명칭
카메라 ID가 설정된 다음에 자동으로 입력될 것입니다.카메라 IP 주소
기본값:127.0.0.1설명: 카메라의 실제 IP 주소.카메라 포트
기본값:5577설명:카메라 포트타임 아웃
기본값:10s추천값:10s설명: 설정된 시간 내에 카메라가 이미지를 못 캡처한다면 타임 아웃입니다. 이런 경우에 카메라가 이미지 캡처를 다시 시도하고 연속적으로 3차례 실패한다면 이상 알림 메시지가 나타날 것입니다.VirtualCamera
데이터 경로
1.Eye To Hand 프로젝트를 사용하여 시뮬레이션합니다.설명:데이터 경로를 선택할 때 해당 경로에 있는 이미지가 다음과 같은 형식으로 저장된 것이 아니면 “가상 카메라 도우미” 창이 나타나 이미지 데이터를 선택해 줄 것입니다. 가상 카메라 도우미 사용 설명:
가상 카메라 도우미 사용 설명: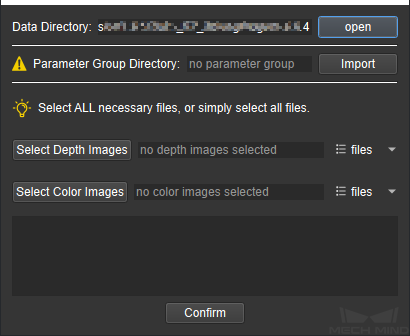 데이터 폴더: 열기 를 클릭하여 다시 경로를 선택할 수 있으며 올바르게 선택한 다음에 설정 완료 알림이 나타날 것입니다.파라미터 그룹 폴더: 카메라의 내/외부 파라미터 그룹을 선택해 도입하기 를 클릭하여 파라미터 그룹을 업데이트합니다.뎁스 맵/컬러 맵을 선택하기: 뎁스 맵과 컬러 맵을 여러 장을 선택해 파일 ▼ 을 클릭하여 선택된 이미지를 봅니다.설정한 다음에 “확인” 을 클릭하여 “가상 카메라 설정 완료” 창이 나타나 이 때 OK를 클릭하여 닫으면 됩니다.2.Eye In Hand 프로젝트를 사용하여 시뮬레이션합니다.설명:설명:데이터 경로를 선택할 때 해당 경로에 있는 이미지가 다음과 같은 형식으로 저장된 것이 아니면(EIH 프로젝트가 ETH보다 플랜지 포즈를 저장하는 폴더가 더 있음) “가상 카메라 도우미” 창이 나타나 이미지 데이터를 선택해 줄 것입니다.
데이터 폴더: 열기 를 클릭하여 다시 경로를 선택할 수 있으며 올바르게 선택한 다음에 설정 완료 알림이 나타날 것입니다.파라미터 그룹 폴더: 카메라의 내/외부 파라미터 그룹을 선택해 도입하기 를 클릭하여 파라미터 그룹을 업데이트합니다.뎁스 맵/컬러 맵을 선택하기: 뎁스 맵과 컬러 맵을 여러 장을 선택해 파일 ▼ 을 클릭하여 선택된 이미지를 봅니다.설정한 다음에 “확인” 을 클릭하여 “가상 카메라 설정 완료” 창이 나타나 이 때 OK를 클릭하여 닫으면 됩니다.2.Eye In Hand 프로젝트를 사용하여 시뮬레이션합니다.설명:설명:데이터 경로를 선택할 때 해당 경로에 있는 이미지가 다음과 같은 형식으로 저장된 것이 아니면(EIH 프로젝트가 ETH보다 플랜지 포즈를 저장하는 폴더가 더 있음) “가상 카메라 도우미” 창이 나타나 이미지 데이터를 선택해 줄 것입니다.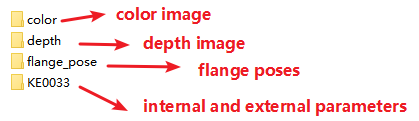 가상 카메라 도우미 사용 설명:
가상 카메라 도우미 사용 설명: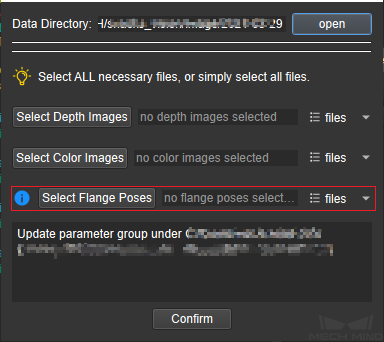 플랜지 파일을 선택하기: 필요한 플랜지 파일을 선택하여 파일 ▼ 을 클릭하여 선택된 파일을 봅니다.
플랜지 파일을 선택하기: 필요한 플랜지 파일을 선택하여 파일 ▼ 을 클릭하여 선택된 파일을 봅니다.플레이 모드
기본값:순서대로 일기값 리스트: 순서대로 읽기, 싱글 반복, 모두 반복,랜덤 읽기.설명: 파일 내에 있는 이미지를 읽는 모드를 바꿉니다.이미지 명칭 유형
기본값:완전한 경로값 리스트: 완전한 경로, 파일 완전한 명칭,파일 명칭.설명: 츨력된 이미의 명칭 유형을 바꿉니다.다시 연결하는 횟수
기본값:3추천값:3설명: 캡처 실패 시의 다시 시도하는 횟수.