통신 시스템¶
가능한 통신 협의¶
Mech-Mind 비전 시스템은 현재 주로 TCP/IP로 외부 설비와 통신합니다. 또한 Modbus, Ethernet/IP, Profibus, Profinet 등 다른 이더넷 기반으로 한 통신 프로토콜도 가능합니다.
Modbus는 master/slave 아키텍처를 사용하여 240 개 장치가 동일한 네트워크에서의 통신을 지지하고 산업용 전자 장치 간의 성용헌 연결 방식입니다.
Ethernet/IP는 산업에서 사용되는 애플리케이션층 통신 프로토콜로, PLC, I/O 모듈 등 제어 시스템과 부품 간의 통신을 구축할 수 있습니다.
Profibus는 중소량 데이터 전송에 적합한 현장급, 유닛급 네트워크입니다.
Profinet는 분산식 자동화를 지지하는 하이엔드 통신 시스템으로 모듈식 구조를 가지고 있어 사용자가 자신의 필요에 따라 다양한 기능을 선택할 수 있습니다.
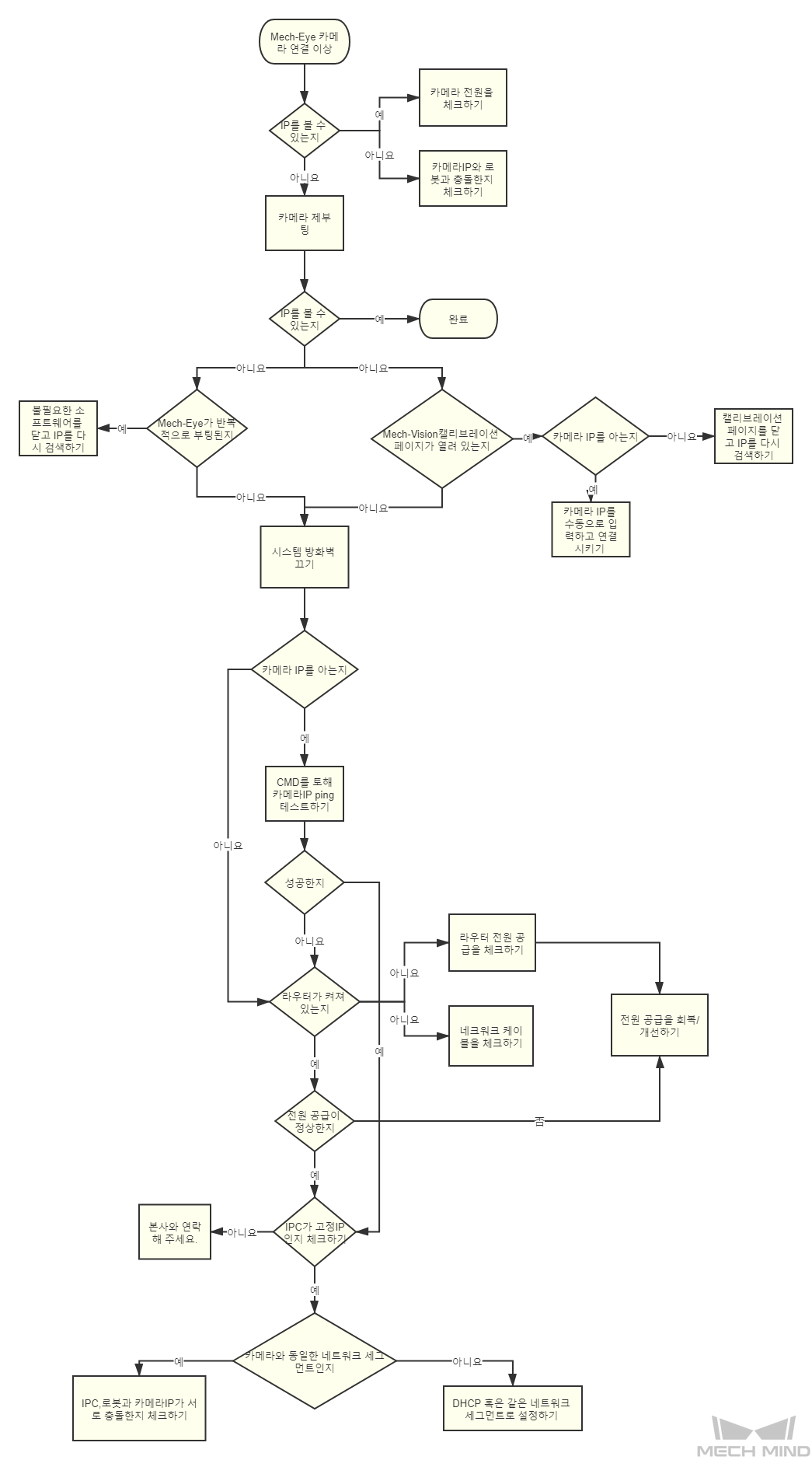
네트워크 구축¶
참고
이 챕터에서는 외부 센서와 호스트 컴퓨터가 없는 가장 기본적인 Mech-Viz 마스터 로봇과 TCP/IP 프로토콜을 예로 사용하여 네트워크 구성에 대해 설명합니다.
소프트웨어 및 하드웨어 시스템 의 시스템 하드웨어 구조 약도에 따르면 라우터는 로봇과 Mech-Eye 카메라를 IPC에 각각 연결해야 합니다. IPC는 무선 어댑터로 인터넷에 연결하는 것을 가정하며 유선 연결의 무선랜과 분리됩니다. 내부 유선랜에서 로봇은 고정 IP이며 Mech-Eye 카메라는 기본적으로 DHCP 모드를 채택합니다.