通知¶
機能¶
外部サービスへカスタマイズの通知を送信します。
使用シーン¶
外部サービスと通信する必要があるときに使用します。
パラメータ説明¶
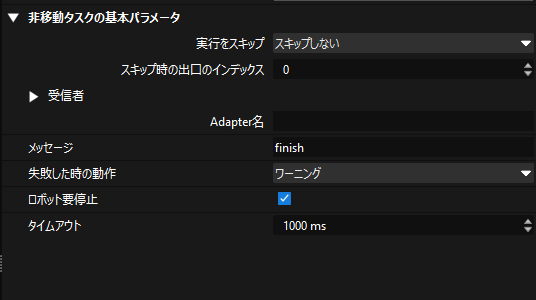
- 非移動ステップの共通パラメータ
詳しくは 非移動ステップの共通パラメータ をお読みください。
- Adapter 名
Adapter は Adapter 名 によってこのステップの情報を取得します。プロジェクトには複数の 通知 ステップがある場合、すべての 通知 ステップに同じ Adapter 名 を指定しなければなりません。
- メッセージ
メッセージをカスタマイズします。Adapter はメッセージによって異なるステップを実行します。
- 失敗した時の動作
通知のメッセージを送信できなかった場合に実行する動作を選択します。
オプション:
ワーニング:ワーニングします(初期値)。
再試行:再度試行します。
破棄:ステップを破棄します。
- ロボット要停止
チェックすると、ロボットがこのステップで停止します。チェックを外すと、実行していると同時にメッセージを送信します。
- タイムアウト
指定した時間内にメッセージを送信しない場合、ロボットが 失敗した時の動作 を実行します。