位置姿勢の四元数を設定¶
注釈
このステップの内容は現在メンテナンス中です。本ステップについての情報が必要な場合は、Mech-Mind株式会社(メールアドレス:docs@mech-mind.net)までお問い合わせください。
機能¶
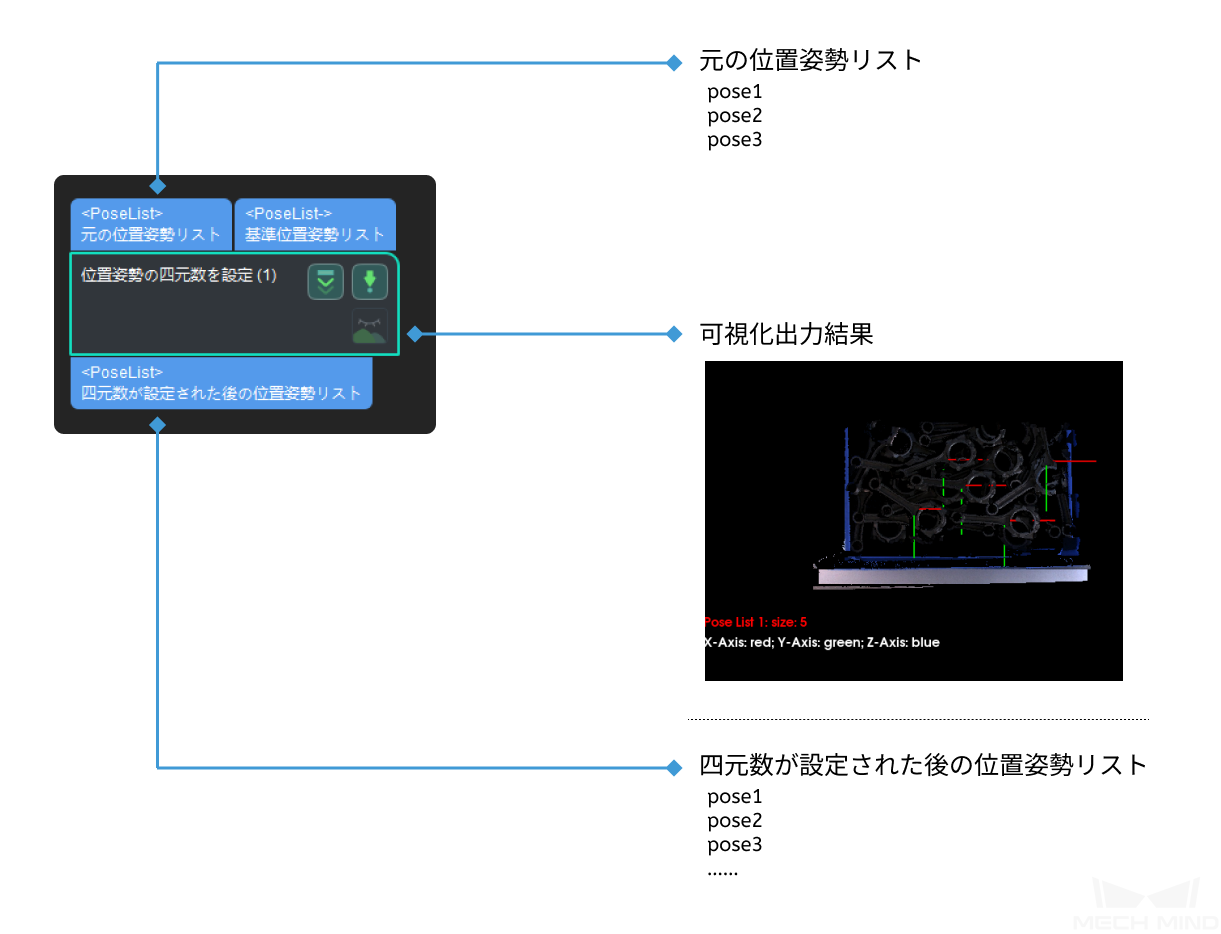
位置姿勢の姿勢(四元数で表示される)を設定するには、2番目のポートに入力された基準位置姿勢もしくはパラメータで設定された四元数を使用できます。
使用シーン¶
汎用の位置姿勢の四元数設定ステップです。基準位置姿勢リストに複数の位置姿勢が含まれる場合は、最初の位置姿勢の四元数のみが設定のために使われます。
入力と出力¶