Software Suite
v1.7
无标题文档
Mech-Mind
他のバージョン
バージョン:
latest
1.6
1.5
1.4
ホームページに戻る
公式企業サイト
コメント
改訂履歴
PDFダウンロード
ようこそ
クイックスタート
ソフトウェアの更新説明
ソフトウェアのインストールガイド
応用
ビジョンシステムの構築
アプリケーションの最適化
注意事項
応用事例
ソフトウェアの使用ガイド
Mech-Vision
Mech-Visionの概要
ソリューションの構築手順
Mech-Visionの基本操作
ステップの参照情報
2D特徴抽出
2D汎用処理
2Dマッチング
3D特徴抽出
3D汎用処理
3D位置姿勢推定
3Dモデル作成
複合ステップ
演算
箱検出
カメラ
通信
ディープラーニング
デパレタイジング/パレタイジング
描画
外部デバイス
ラベル
位置姿勢にラベルを付ける
任意の変数からラベルに変換
ラベル接続
ラベルマッピング
しきい値によって数値を分類
必要なラベルであるかどうかを検証
マッピング
マスク処理
測定
メタ
位置姿勢
位置姿勢2
読み取る・保存
ソート
テスト
ツール
経路
変換
可視化
ほか
古いバージョンのステップ
ステップの組合せの参照情報
代表的なソリューションのヘルプマニュアル
ハンド・アイ・キャリブレーションの使用ガイド
測定モードの使用ガイド
補助ツールの使用ガイド
Mech-Viz
Mech-Center
ロボットの通信設定
通信方式の概要
Vizティーチング
標準インターフェース
サポート
トラブルシュート
FAQ
付録
産業用PC
キャリブレーションボード
用語集
Software Suite
Docs
»
Mech-Vision
»
ステップの参照情報
»
ラベル
»
位置姿勢にラベルを付ける
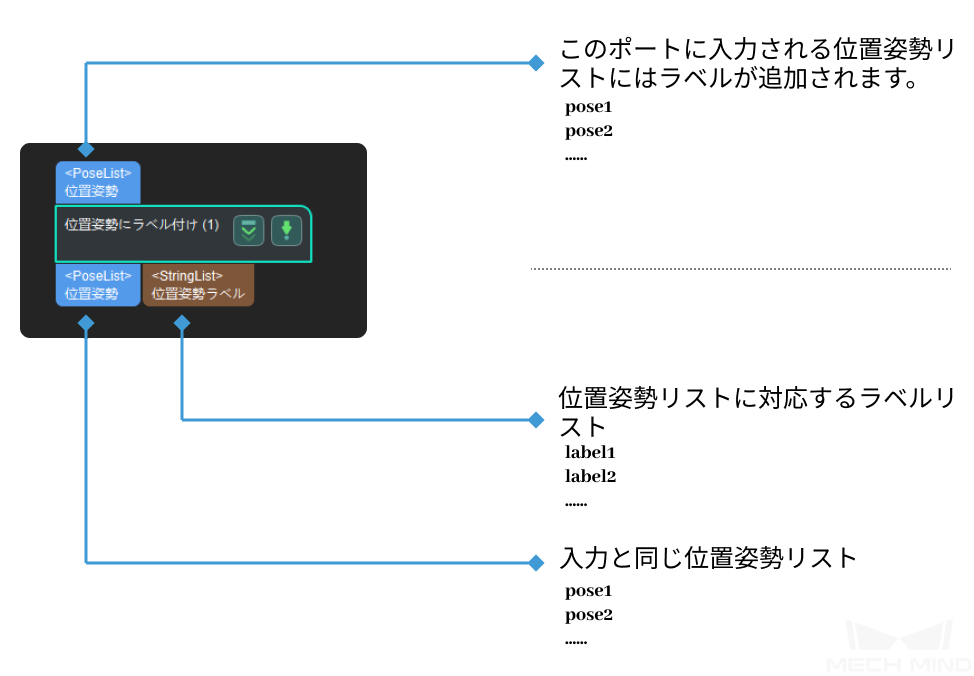
位置姿勢にラベルを付ける
¶
機能
¶
各入力位置姿勢に同じラベルを追加します。
使用シーン
¶
汎用位置姿勢処理ステップであり、特定の使用シーンはありません。
入力と出力
¶
パラメータ説明
¶
ファイルの設定
ラベルファイル
初期値:addLabels.json
調整説明:ラベルファイルを保存する絶対パスまたは相対パス。ファイルには、必要なラベル名が含まれています。