ELITE Setup Instructions¶
This section introduces the process of setting up master control of an ELITE robot.
Check Controller and Software Compatibility¶
Controller software version: 2.19.2 or lower
Note
See step 2 in IP Configuration for instructions on checking the software version.
Set up the Network Connection¶
Hardware Connection¶
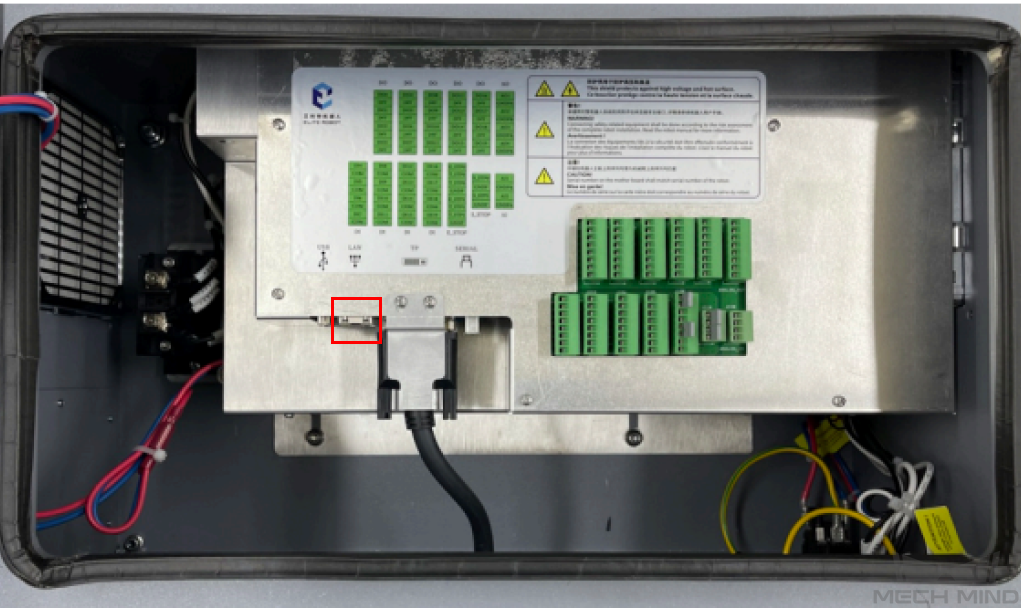
Plug the Ethernet cable into:
An Ethernet port on the IPC
The LAN port inside the controller
IP Address Configuration¶
To allow communication between the IPC and the robot controller, the IP addresses of the two must be in the same subnet.
Note
You can change the IP address of either of the following ports, to make sure the IP addresses of the two are in the same subnet.
The LAN port inside the controller
The IPC Ethernet port connected to the controller
You can check the IP address of the controller LAN port in .
Follow these steps to change the IP address of the controller LAN port.
Turn the key to TEACH, and check if the current user account is Admin in the lower left.
If it’s not Admin, press the user account and select Admin. Then, enter the password (default password: 333333) and press OK.
Select .
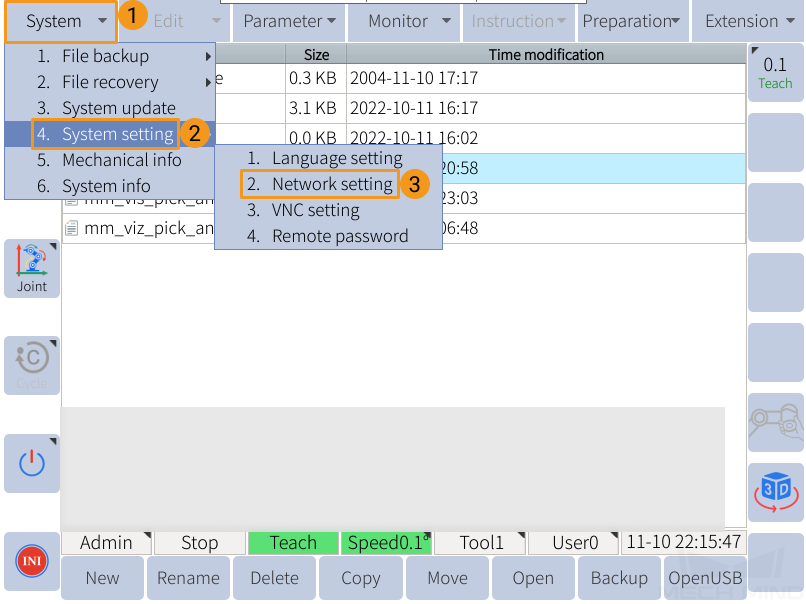
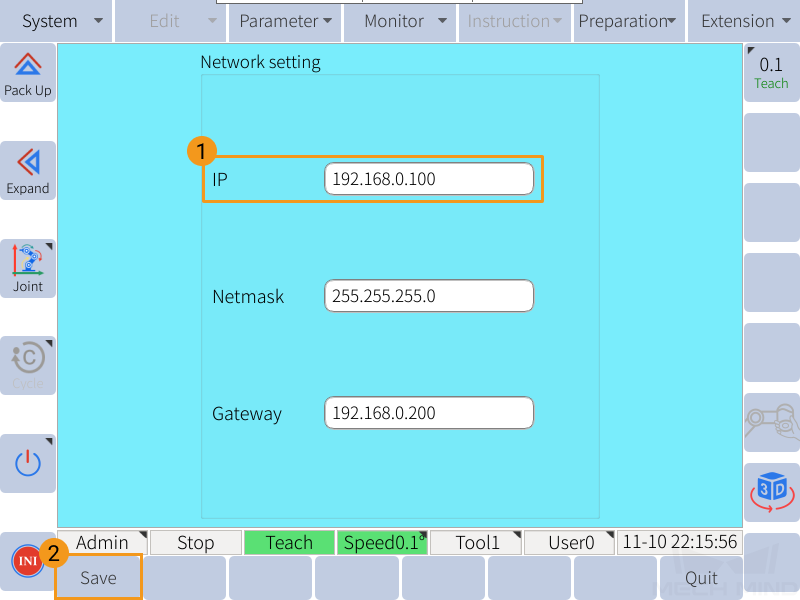
Set the IP address. Then, press Save to save the change.
Connect to Robot¶
Back up User Data¶
It is recommended to back up the user data on the robot before operating the robot, in order to recover the data if any damage occurs due to the operation.
Insert the flash drive into the USB port on the controller.
On the teach pendant, select .
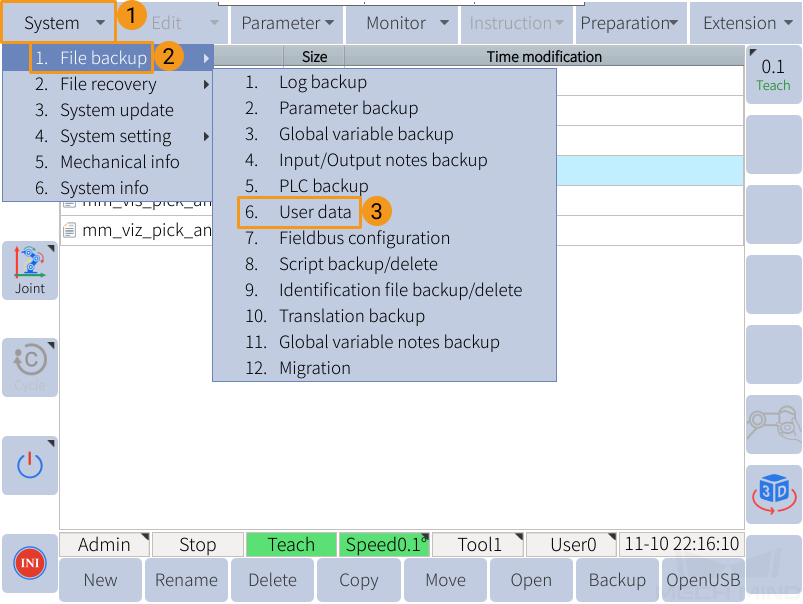
Select OK in the pop-up window.

If the backup is successful, you can find a rbctrl folder on the flash drive. The backup data are stored in this folder.
Enable Remote Function¶
The remote function must be enabled for the robot to be master-controlled by Mech-Mind Software Suite.
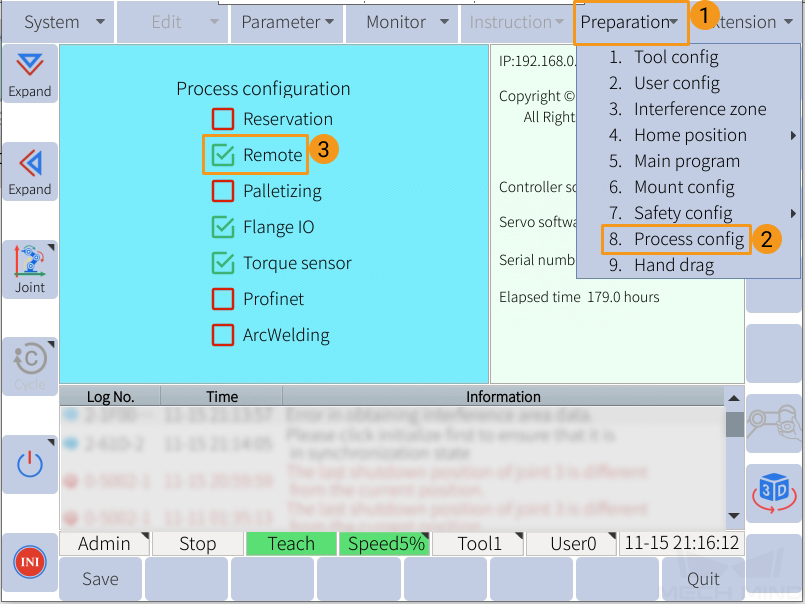
On the teach pendant, select . Check the Remote option, and then restart the robot.
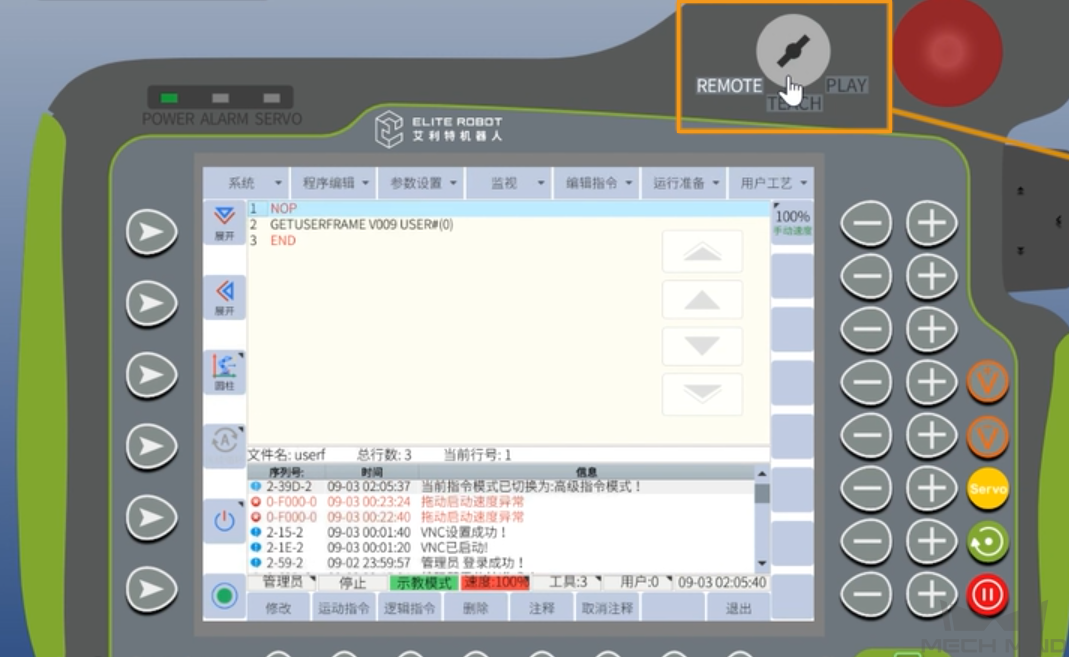
Turn the key to REMOTE.
Test Robot Connection¶
Configure Robot in Mech-Viz¶
Open Mech-Viz, click New project to create a new project.
Select the robot model in use in the next page.
Save the project by pressing Ctrl + S.
In the toolbar, change the Vel. (velocity) and Acc. (acceleration) parameters to 5%.
Right-click the project name in Resources and select Autoload Project.
Configure Settings in Mech-Center¶
Open Mech-Center and click on Deployment Settings.
Go to Robot Server, and make sure Use robot server is checked.
Check if the robot model displayed next to Robot type in Mech-Viz project matches the one in use.
Set the Robot IP address, and click Save.
Connect to Robot in Mech-Center¶
Click Connect Robot on the toolbar.
The robot is successfully connected if:
A message saying Robot: server connected to the robot shows up in the Log panel, and
A robot icon with the robot model shows up in the Service Status panel.
Move the Robot¶
In Mech-Viz, click Sync Robot on the toolbar to synchronize the pose of the real robot to the simulated robot. Then, click Sync Robot again to disable the synchronization.
Click the Robot tab in the lower right, and change the joint position of J1 slightly (for example, from 0° to 3°). The simulated robot will move accordingly.
Click Move real robot, the real robot should move accordingly.
Attention
When moving the robot, please pay attention to safety hazards. In the case of an emergency, press the emergency stop button on the teach pendant!