Array Gripper¶
At present, the array gripper mode only supports multiple end tools that are arranged in a single row. The parameters in the array gripper mode are shown in the figure below.
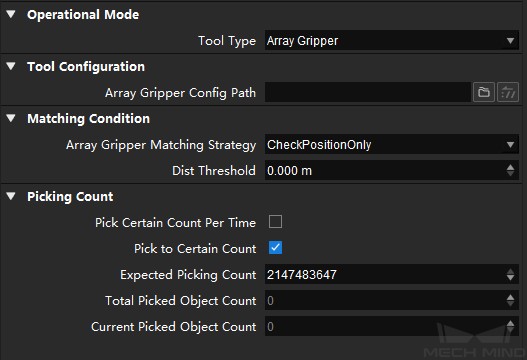
Tool Configuration
- Array Gripper Config Path
Click
 to select the array gripper configuration file. You can use the Array Gripper Configurator to configure the array gripper and export the configuration file in JSON format.
to select the array gripper configuration file. You can use the Array Gripper Configurator to configure the array gripper and export the configuration file in JSON format.
Matching Condition
- Array Gripper Matching Strategy
When CheckPositionOnly is selected, you can only adjust Dist Threshold. When CheckPositionAndOrientation is selected, you can adjust both Dist Threshold and Angle Threshold.
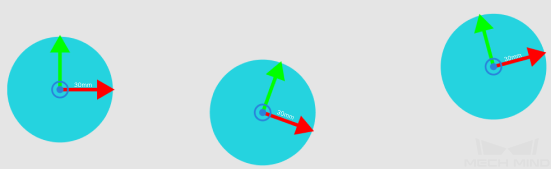
- Dist Threshold
- Description: The pick point will be within a circle with the object pose as the center and the set Dist Threshold as the radius.Examples:
When the Dist Threshold is set to 30 mm, the possible areas for picking are shown in the figure below.
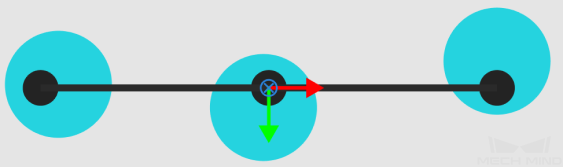
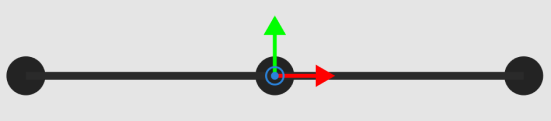
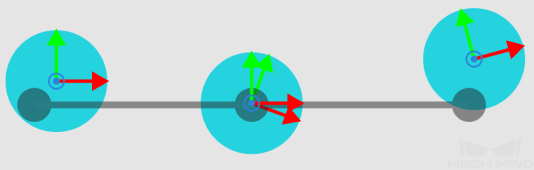
An array gripper with 3 end tools that are 100 mm away from each other is shown in the figure below.

In the path planning, the software will find a position where all three TCPs fit in the possible areas for picking (the blue circles as shown below).
Hint
If three TCPs cannot be matched with the possible areas for picking at the same time, the software will try to match two TCPs instead.
- Angle Threshold
- Description: The angle between the pick point and the TCP.Examples:
The TCP will be rotated 180° around its own X-axis and its Z-axis will be upward and parallel with that of the pick point.
If the angle between the pick point and the TCP is within the Angle Threshold, the pick point will be used for picking, or else it will be discarded.
Hint
In the Array Gripper mode, it is acceptable that the objects in the middle of a combination is missed as long as the combination is not rotationally symmetric. For example, if an array gripper has 4 end tools which are numbered as 0, 1, 2, and 3, and there are 3 objects which are arranged as OOXO (O represents the object and X represents the empty place), tool 0, 1, and 3 should be started. After being rotated 180°, the combination changes from OOXO to OXOO, which is not symmetric.
Picking Count
This parameter group is used to count the picked objects and calculate the rest of the objects to be picked. Once you enter an Expected Picking Count, the Total Picked Object Count and Current Picked Object Count will be calculated automatically.
- Expected Picking Count
The maximum number of picked objects.
- Total Picked Object Count
The number of picked objects, which is counted automatically and cannot be modified.
- Current Picked Object Count
The number of the picked object this time, which is counted automatically and cannot be modified.