Fixed-Point Move¶
Note
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net.
Function¶
This Step specifies a waypoint in the robot motion path and the way to move to the waypoint.
Parameter Description¶
- Move-Type Step Common Parameters
Please refer to General Parameters of Move-Type Steps for detailed information.
- Held Workobject Collision Detection Settings
Please refer to Held Workobject Collision Detection Settings for detailed information.
- Basic move settings
Please refer to Basic Move Settings for detailed information.
Smart Obstacle Avoidance
This function provides multiple alternative waypoints that are close to the waypoint of a move-type Step, which increases the number of feasible paths planned by Mech-Viz and the success rate of planning, and reduce the difficulty of debugging.
You can select the Obstacle Avoidance Mode according to the requirements of the speed and success rate of path planning.
- Obstacle Avoidance Mode
- Disable Smart Obstacle Avoidance.Speed Priority: Plan the path with speed priority. A minimum number of alternative waypoints will be generated.Success Rate Priority: Plan the path with success rate priority. The largest number of alternative waypoints will be generated.Balance: Balance the speed and success rate to plan the path. A moderate number of alternative waypoints will be generated.
- Range of Position Adjustment (Radius)
- Default Value: 0.005The alternative waypoints will be generated within the sphere with the set value as the radius.
- Range of Angle Adjustment
- Default Value: 0Value Range: 0 - 79The TCP will be adjusted within the range of the alternative waypoints.
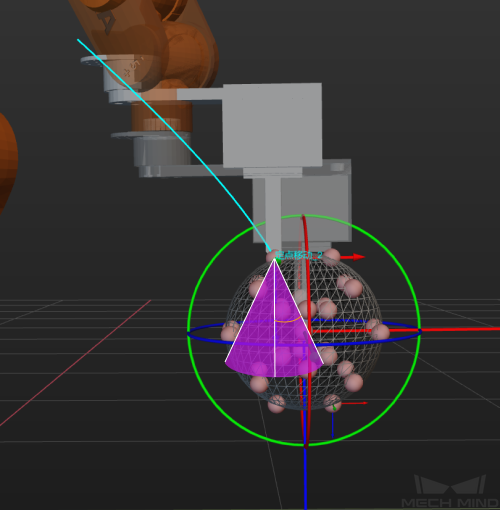
- Show All Alternative Points
Selected by default to show all alternative waypoints. Unselect to hide all alternative waypoints.
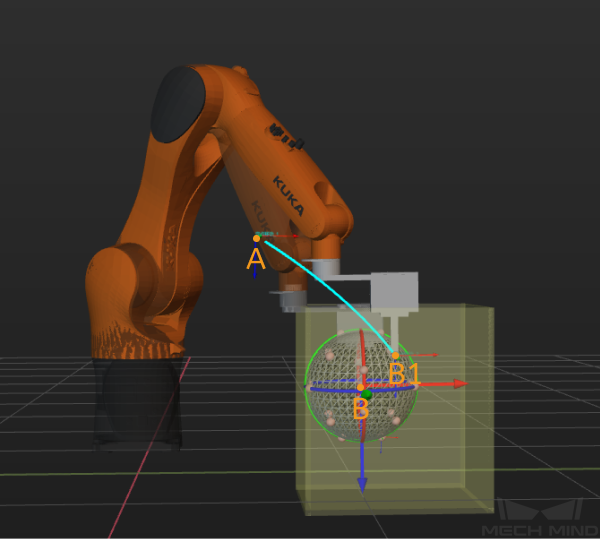
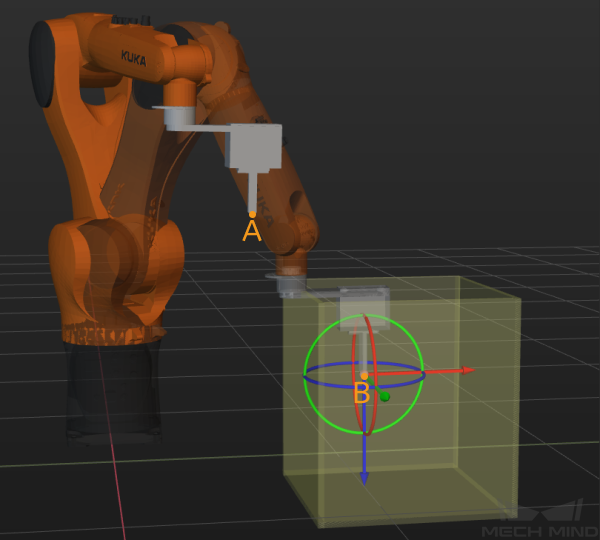
- Usage Example
The tool will collide with bin when the robot moves from waypoint A to waypoint B.
After enabling the Smart Obstacle Avoidance at waypoint B, Mech-Viz will automatically select the alternative waypoint B1 to avoid the collision.