Instructions for Pick Anything (Without Bin) Projects¶
For pick anything projects, since there is no single model that can be applied to all objects of varying types and shapes, deep learning algorithms are needed to estimate pick points.
Create a New Typical Application Project¶
Click in the menu bar or New Typical Application Project on the toolbar to open the following window.
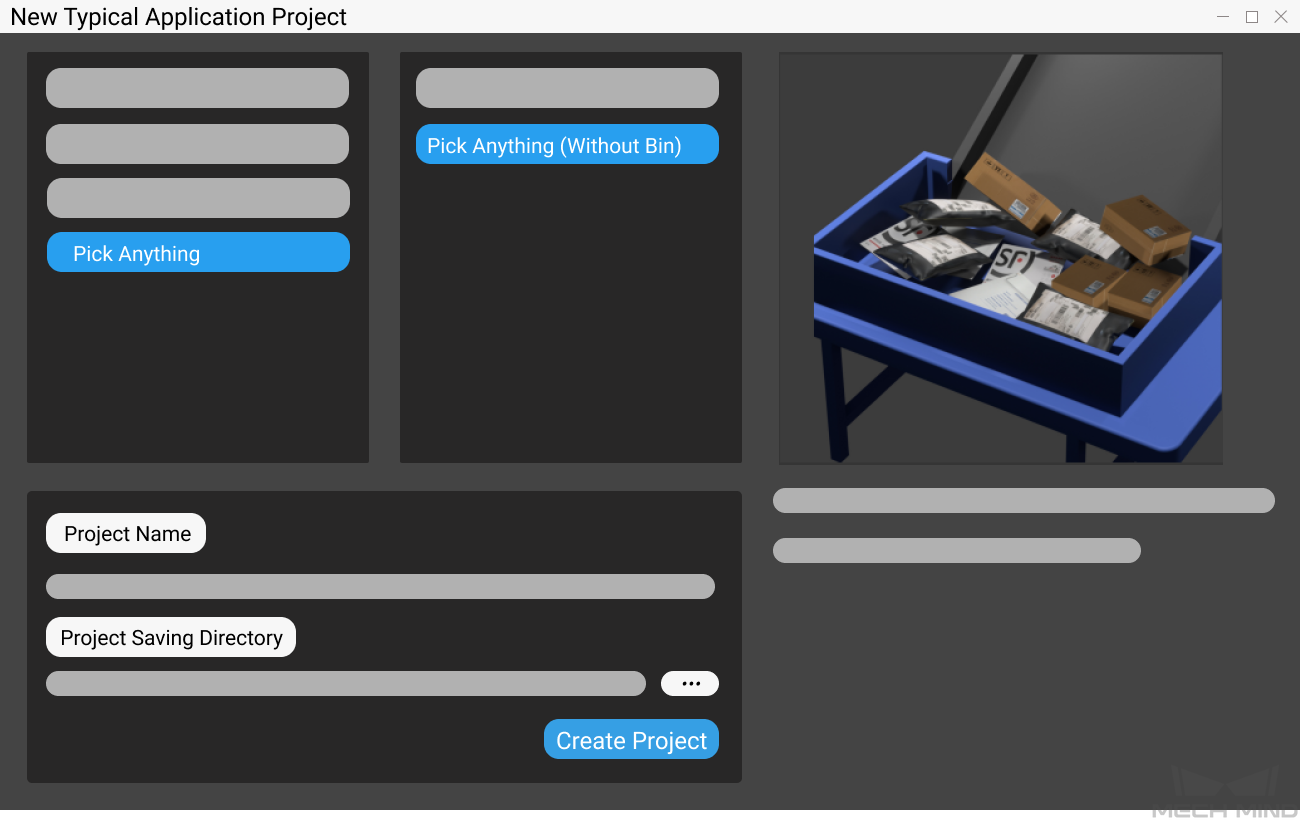
Select Pick Anything (Without Bin).
Name the project.
Click on
 to select a folder to save the project (it is recommended to create an empty folder), then click Create Project.
to select a folder to save the project (it is recommended to create an empty folder), then click Create Project.
Preparation¶
Camera Calibration¶
The purpose of camera calibration is to obtain the configurtaion file of the camera and determine the spacial relationship between the robot and the camera.
Click Camera Calibration (Standard) on the toolbar to calibrate the camera.

You can also go to to calibrate the camera.
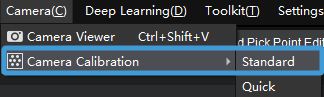
Please refer to Camera Calibration - Standard Mode for detailed instructions.
Camera Configuration¶
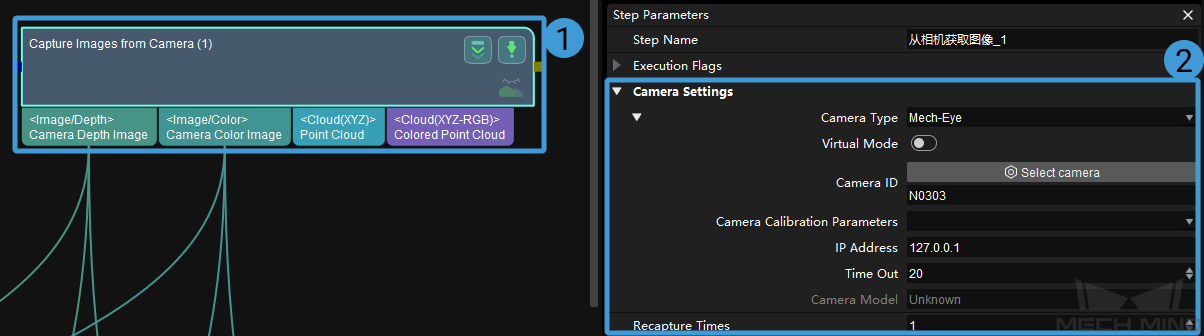
Before using the camera to capture images, please select the Capture Images from Camera Step, and configure Camera ID, Camera Calibration Parameters, IP Address, and other parameters in the Step Parameters panel. Please refer to Capture Images from Camera for detailed instructions.
Running and Debugging¶
Hint
While running the project, please use a port number use a port number between 60000 and 65535 (including 60000 and 65535).
Please see Run Project and Debug for how to run and debug the project.
Please see Details of the Project to learn about the algorithms and parameter adjustment of the project.
After successfully running and debugging the project, if you need to save the on-site data for future reference or you find that certain part of the project is not performing well and would like to improve the project structure or parameter settings in an off-site situation, the Data Storage and Data Playback tools can be very useful.
Prerequisites for using the tool Data Playback tool:
A project file in which the project can run correctly without errors.
On-site source data gathered during the whole period while running the project, including 2D color images, depth maps, camera parameter file. Please refer to Data Storage for instructions on how to save the data.