Select the Robot¶
This section introduces how to select a robot.
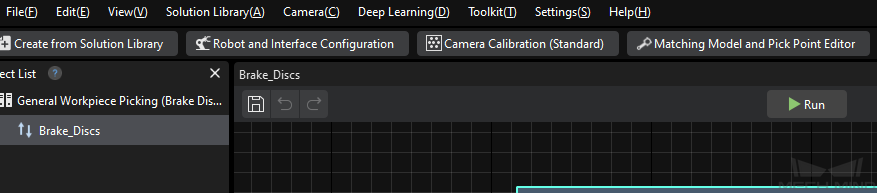
Click Robot and Interface Configuration on the toolbar of Mech-Vision.
Select the robot.
Select a listed robot
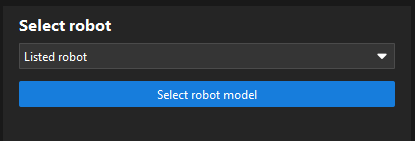
Click the Select robot dropdown box, select Listed robot, and then click the Select robot model button.
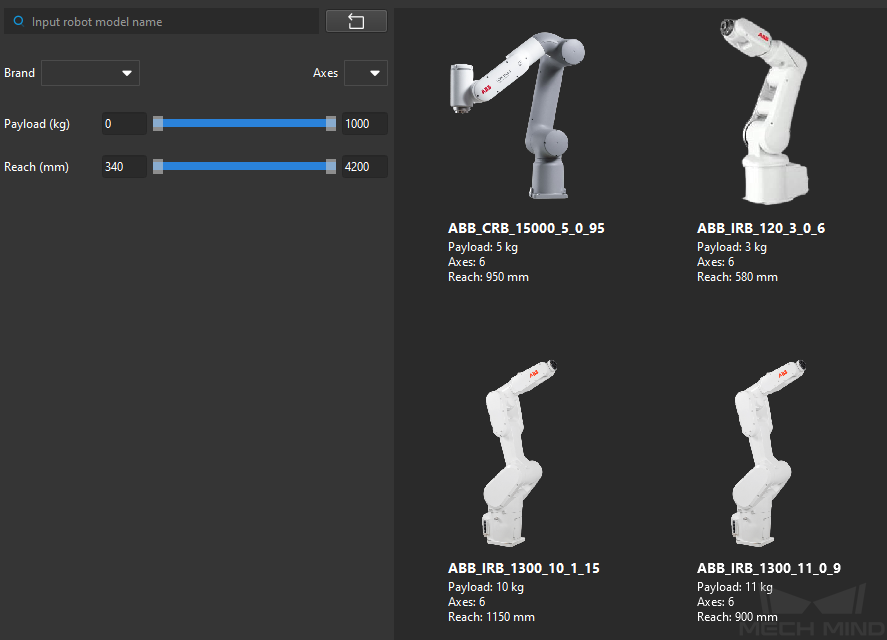
In the Brand dropdown box, select the robot brand. All robot models of this brand will be displayed on the right panel.
Tip
Specify the Axes, Payload, and Reach parameters to narrow down the scope of robot models.
In the search box,enter the robot brand and model to filter the robot. Click the
 button to clear the text in the search box.
button to clear the text in the search box.
Attention
If you fail to find the required robot model in the robot library, close this window. Please import the robot model first and then perform this step again.
Hover the cursor over the robot model to select, and click the Select button when the frame turns grey-white to close the window.
Click the Next button to enter the Communication Option interface.
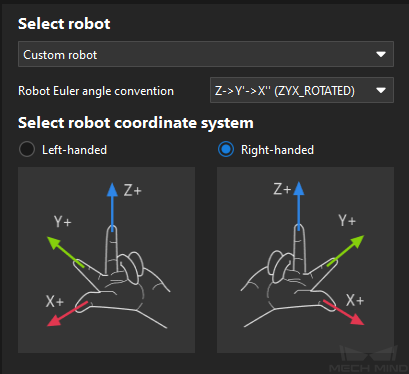
Select a custom robot (for example truss robot)
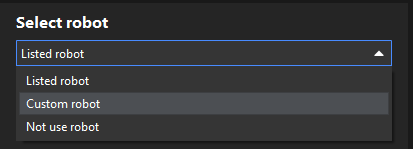
Click the Select robot dropdown box, select Custom robot.
Specify the Robot Euler angle convention parameter.
Select the robot coordinate system.
Click the Next button to enter the Communication Option interface.
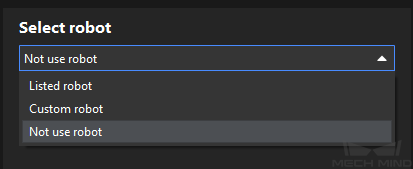
Select not to use robot (in scenarios where no robots are used, such as measuring)
Click the Select robot dropdown box, and select Not use robot.
Click the Next button to enter the Adapter Communication Option interface.
Attention
If you select Not use robot, only the Adapter communication option can be used.