Estimate Point Cloud Edges by 3D Method¶
Function¶
This Step extracts the edges of a 3D point cloud.
Usage Scenario¶
This Step is usually used for matching based on point cloud edges, which is faster than matching based on full point clouds.
Input and Output¶
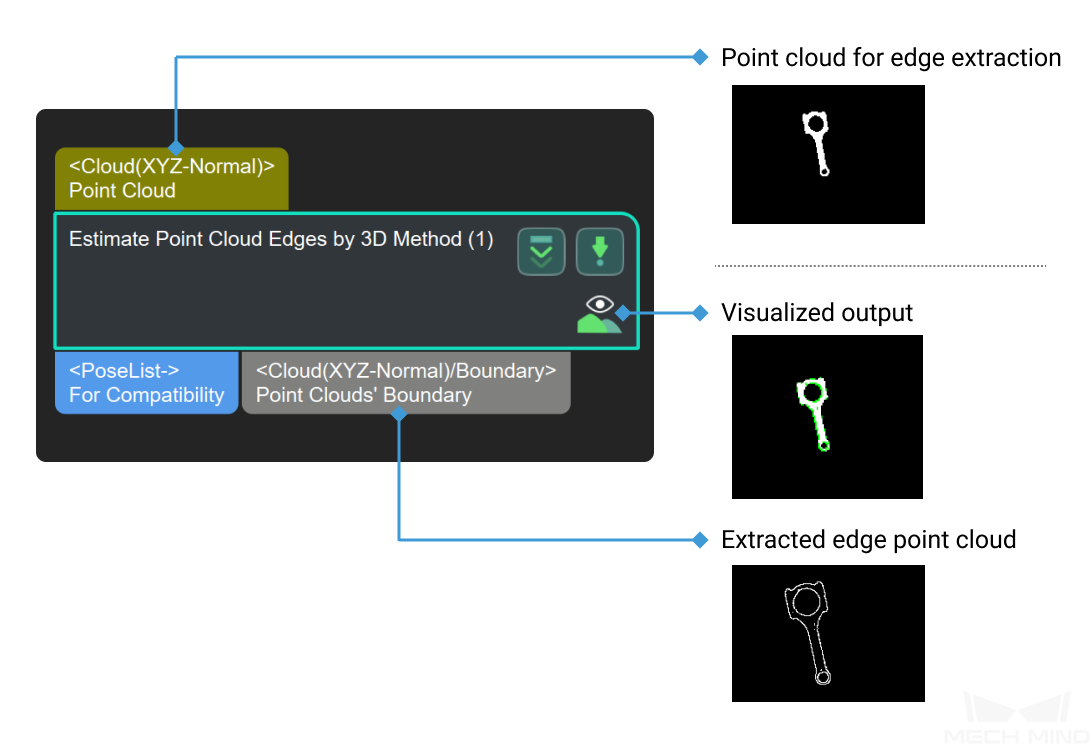
Parameters¶
Boundary Estimations Settings
- Angle Threshold
Neighbour Search Settings
- Nearest Neighbour Search Type
KNN: The search of adjacent points is related to the number of adjacent points.
Radius: The proximity search is related to the search radius.
- Search Number