图像采集与数据类型¶
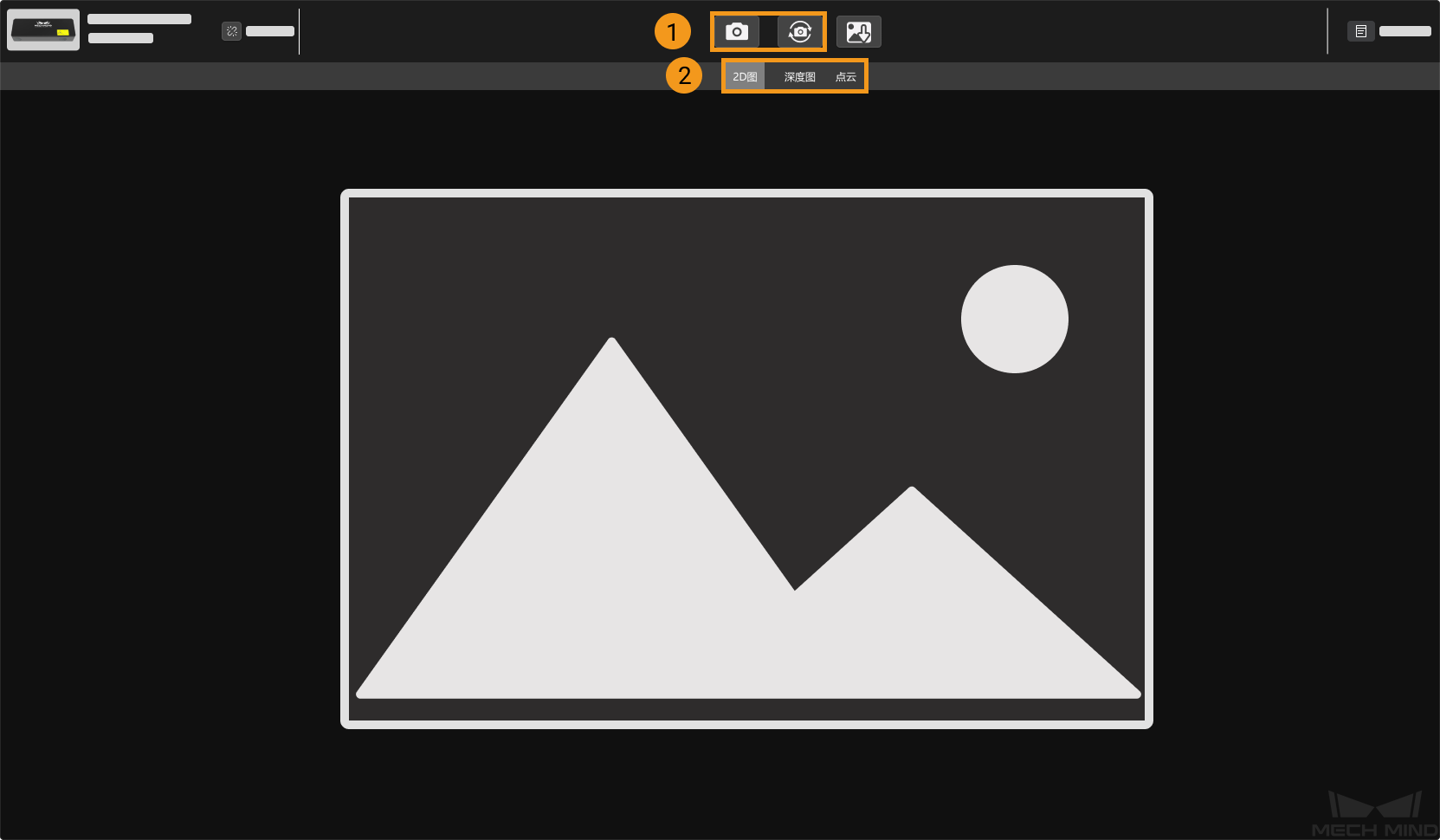
本章主要介绍采集图像以及数据类型。采集图像见下图 ①,数据类型见下图 ②。
数据类型¶
相机采集的数据,有三种类型,见下表。
类型 |
说明 |
2D图 |
黑白或彩色2D图(取决于相机是黑白相机还是彩色相机)。 |
深度图 |
包含从相机到场景物体表面点距离的2D图。每个像素的值是测得的距离。 |
点云 |
3D空间中反映物体表面特征的点的集合。 |

深度图¶
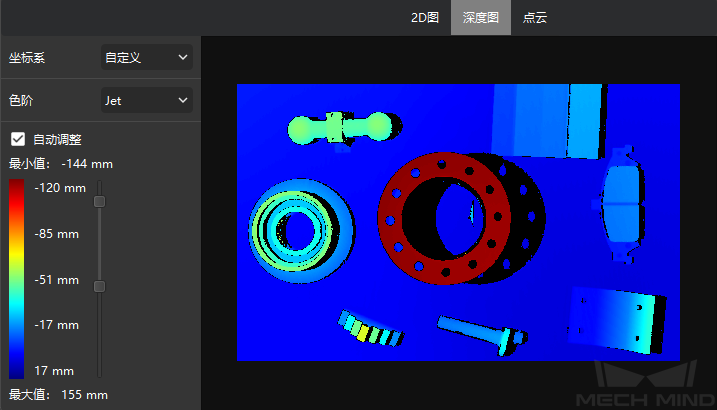
坐标系:分为 相机 与 自定义 两种。
相机坐标系:默认值,相机当前的成像方式。
自定义坐标系:设置 自定义坐标系 ,并根据设置显示深度图和点云。
色阶:选择不同颜色的显示方式。
调节:滑动鼠标滚轮,放大或缩小图像。
重置视图:鼠标移动至图像位置,单击鼠标右键,单击 重置视图 ,图像更新为未缩放时的尺寸。
点云¶
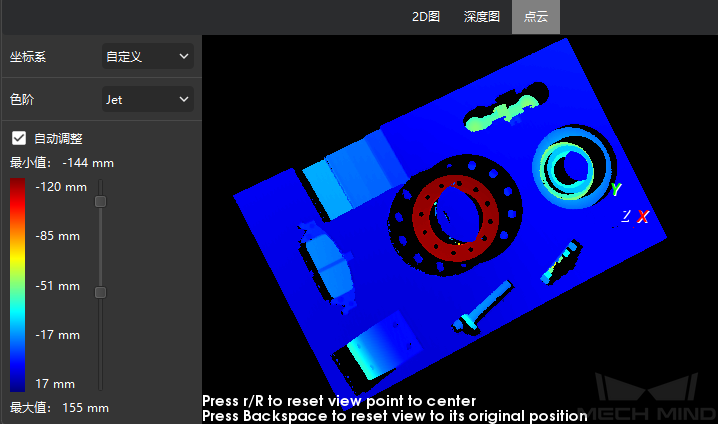
坐标系:分为 相机 与 自定义 两种。
相机坐标系:默认值,相机当前的成像方式。
自定义坐标系:设置 自定义坐标系 ,并根据设置显示深度图和点云。
色阶:选择不同颜色的显示方式。
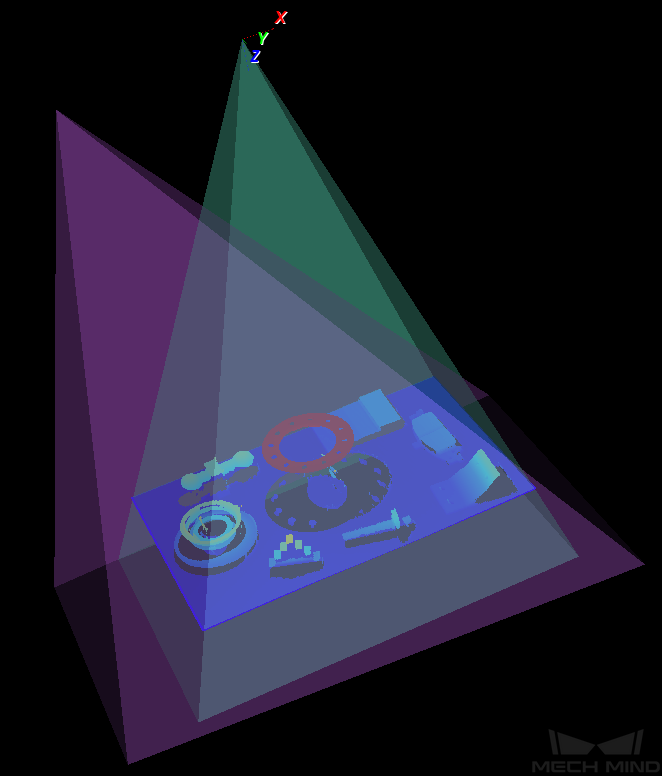
视锥:鼠标移动至图像位置,单击鼠标右键,单击 视锥 ,显示视锥下的点云。
保存点云:鼠标移动至图像位置,单击鼠标右键,单击 保存点云 ,即可保存 .ply 格式的点云(单位:m)。
显示坐标轴:鼠标移动至图像位置,单击鼠标右键,单击 显示坐标轴 ,显示物体坐标轴。
调节:
滑动鼠标滚轮,放大或缩小点云。
按住鼠标左键并移动鼠标,旋转点云。
按住鼠标滚轮,移动点云。
单击键盘 Backspace 键,点云恢复至原始点云状态。