添加机器人模型并连接真实机器人¶
若想连接真实机器人,需要在Mech-Viz中新建工程并加载机器人模型,按照机器人型号来创建软件与真实机器人之间的通讯。
Mech-Viz是本公司自主研发的工业机器人图形化编程软件,能够帮助用户实现对机器人的编程控制、可视化仿真以及运动路径规划。
添加机器人模型¶
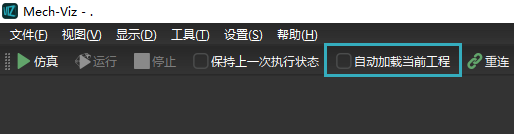
双击图标打开Mech-Viz编程软件,勾选页面上方的 自动加载当前工程。
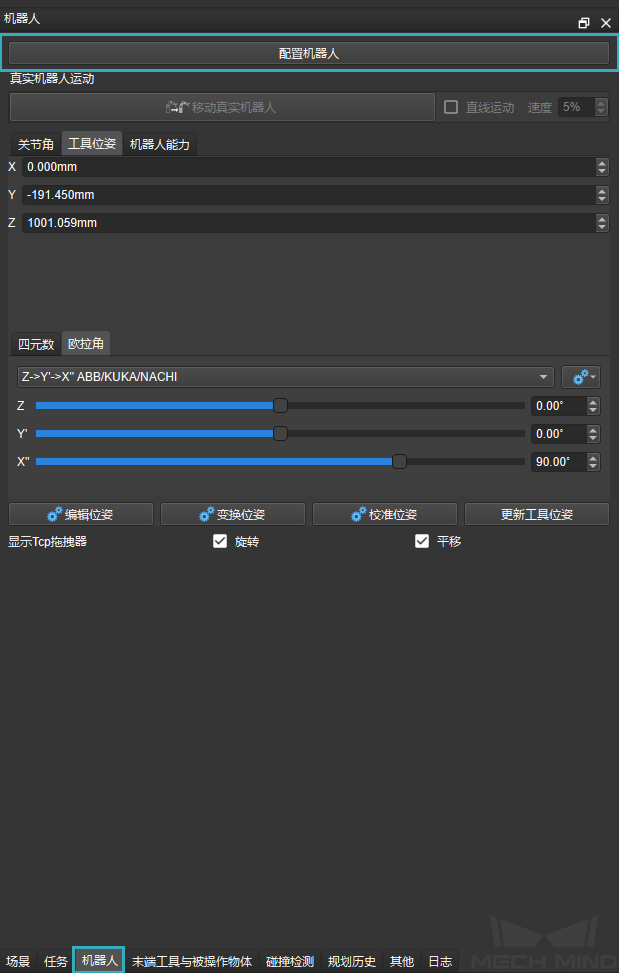
选择右下方的 机器人 选项卡,点击 配置机器人 进入机器人选择界面。
本次纸箱抓取工程将使用UR_3型号机器人,直接选择 UR_3 然后确认即可。
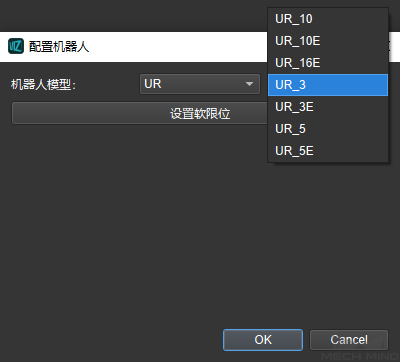
用户选择对应的机器人品牌及型号即可。
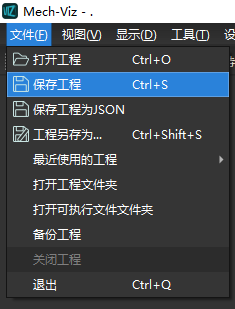
点击页面左上方 保存工程 将工程保存至本地。
连接真实机器人¶
返回Mech-Center主界面,点击上方的 主控机器人 按钮。
待Mech-Center界面右侧日志栏提示 机器人连接成功 ,代表真实机器人已连接成功。 同时可以发现界面上方的服务状态中,也出现了机器人已连接标志
。
添加机器人模型并连接真实机器人操作完成,请继续查看下一节内容。