FANUC (화낙) 캘리브레이션 프로세스¶
이 부분 내용을 시작하기 전에 다음을 확인하십시오.
FANUC (화낙) 인터페이스 프로그램 복제 를 참조해 로봇 프로그램의 복제를 완료하고 Mech-Center와 연결을 하였습니다.
로봇 핸드-아이 캘리브레이션 사용 가이드 의 내용을 살펴보았습니다.
이 부분의 캘리브레이션 내용은 인터페이스를 통해 통신하고 캘리브레이션이 여러번 필요한 경우에 적용됩니다. 다음과 같은 두 가지 경우가 있으면 이 부분 설명을 넘어갈 수 있습니다.
메크마인드 측에서 로봇에 대해 풀 컨트롤(완전한 컨트롤)할 때 빠른 캘리브레이션 을 직접 시작할 수 있습니다.
인터페이스를 통해 통신하고 캘리브레이션의 사용 빈도가 낮은 경우 수동으로 캘리브레이션하는 스텝 을 참조할 수 있습니다.
캘리브레이션 스텝¶
캘리브레이션에는 주로 다음 5단계가 포함됩니다.
캘리브레이션에 사용되는 프로그램을 열기¶
티칭 머신에서 SELECT 를 클릭하여 프로그램 선택 인터페이스로 들어가 커서를 MM_AUTO_CALIB 프로그램으로 이동한 다음 ENTER 를 클릭하여 프로그램 화면에 들어갑니다.

티칭 머신을 통해 캘리브레이션 시작점을 설정하기¶
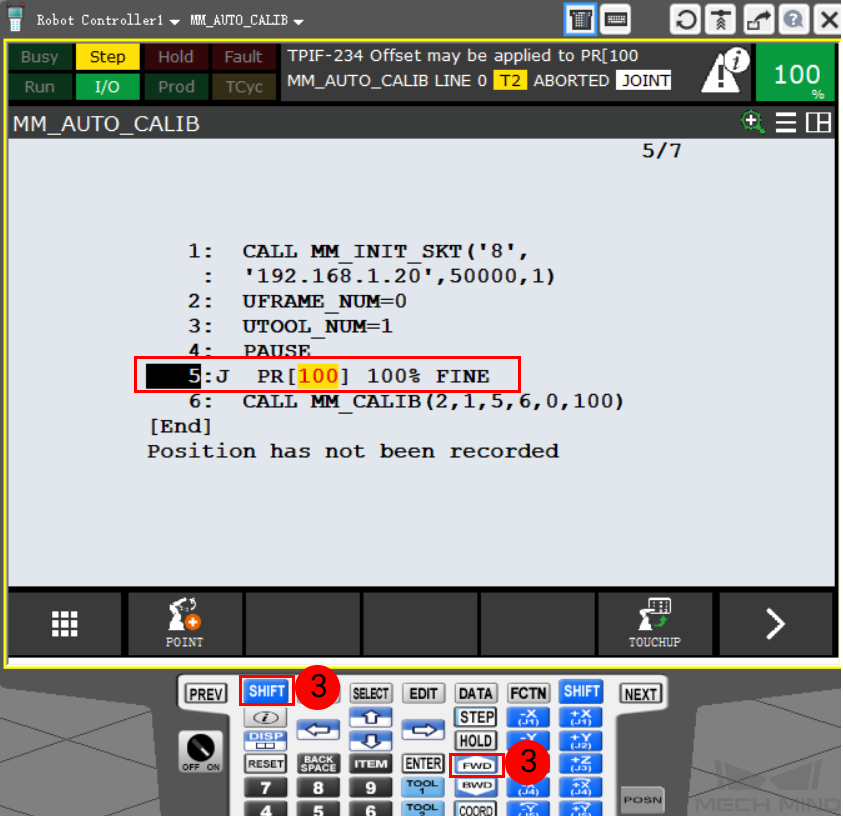
프로그램을 연 후 티칭 머신에서 STEP 을 클릭하여 로봇을 단일 스텝 모드로 전환하면 티칭 머신 위 디스플레이의 Step 이 노란색으로 바뀝니다.


티칭 머신 뒷면에 있는 활성화 스위치를 누릅니다(어느 것 이든 다 됨).

커서를 다섯 번째 명령줄로 이동하고 SHIFT 와 FWD 를 동시에 눌러 다섯 번째 명령줄을 실행합니다.
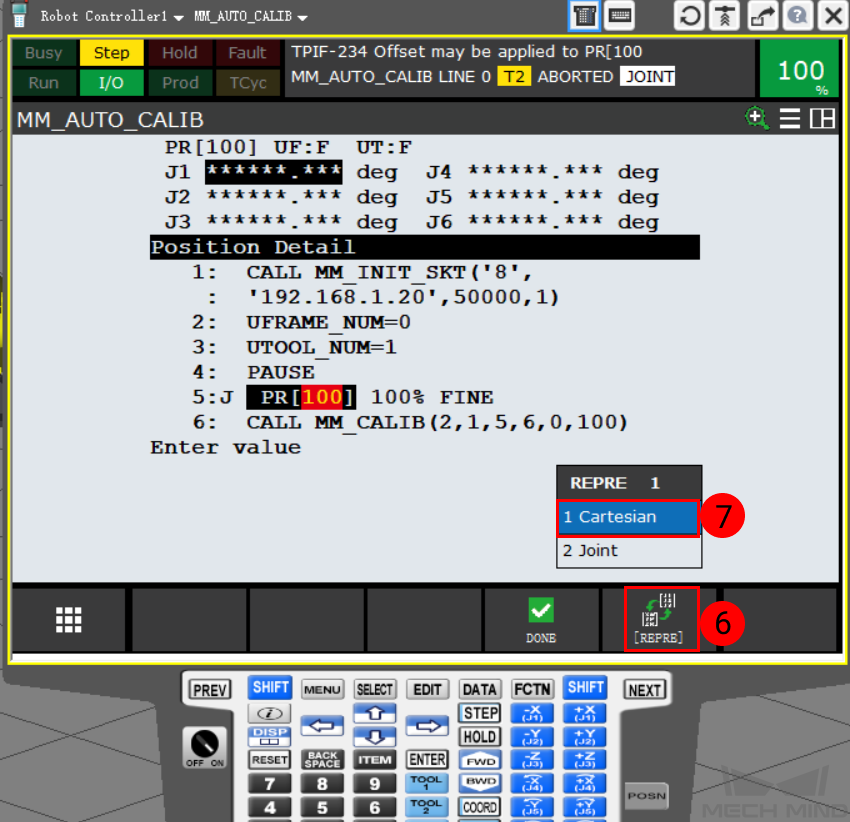
커서를 [100] 에 놓고 를 순서대로 클릭합니다.

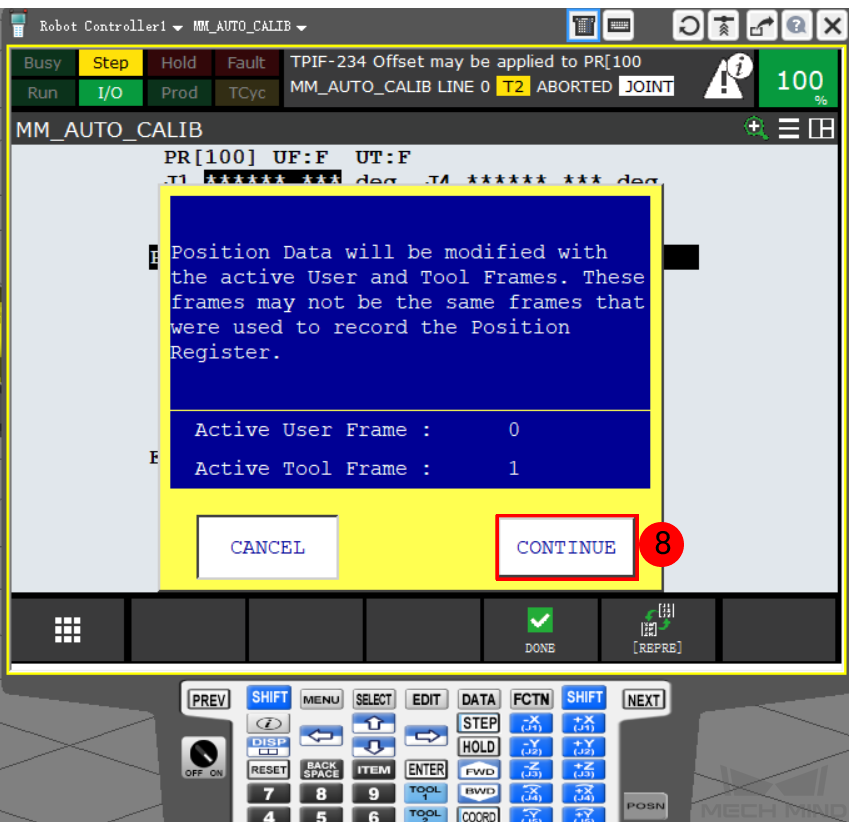
팝업 페이지에서 CONTINUE 을 클릭한 다음 DONE 를 클릭하십시오.

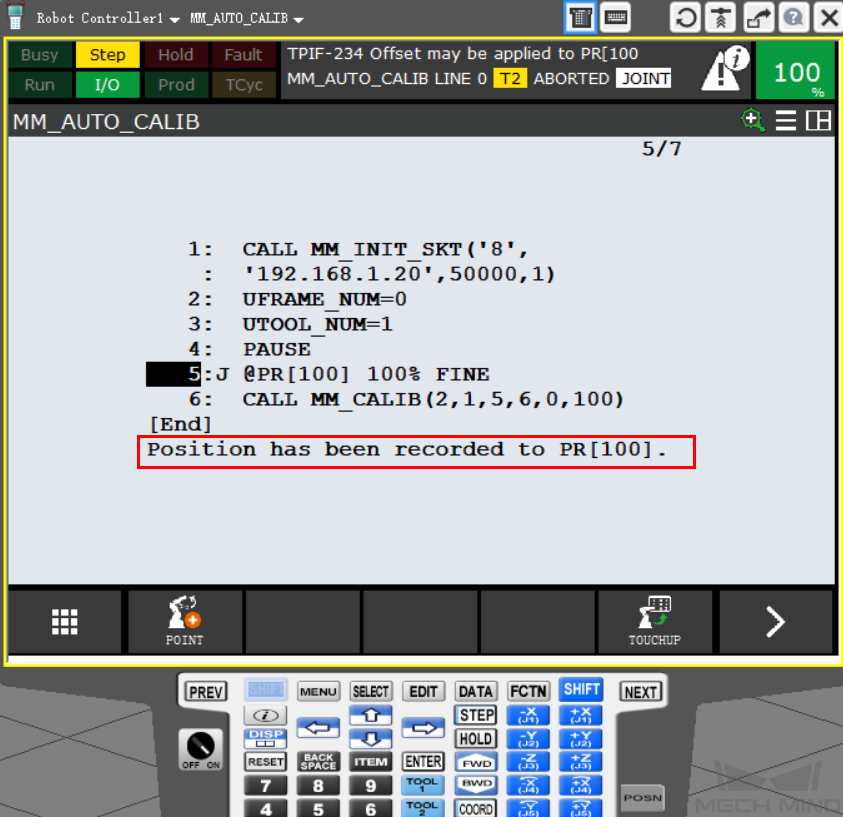
아래와 같이 명령의 다섯 번째 줄 시작 부분으로 커서를 이동합니다. 그다음 티칭 머신에서 SHIFT 및 TOUCHUP 를 동시에 클릭하면 티칭 머신에서 “Position has been recorded to PR[100]” 가 표시됩니다.

티칭 머신에서 STEP 을 클릭하면 티칭 머신의 상단 디스플레이에 있는 Step 이 회색으로 바뀌고 단일 스텝 모드를 종료합니다.

프로그램 실행¶
로봇을 자동 모드로 전환합니다. 아래 그림과 같이 티칭 머신의 스위치가 OFF 로 바뀌고 제어 캐비닛의 키 스위치가 AUTO 로 바뀝니다.


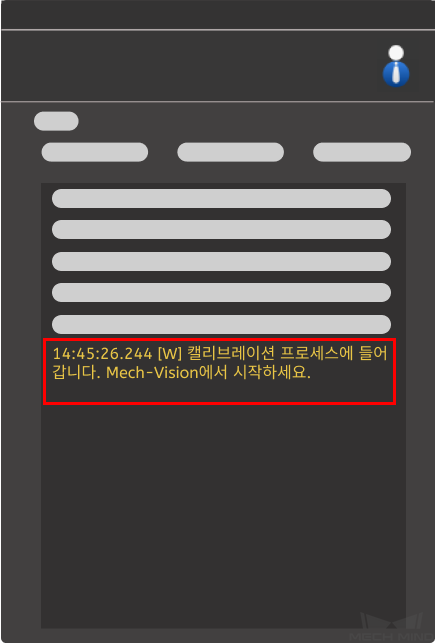
제어 캐비닛의 녹색 버튼을 누르면 캘리브레이션 프로그램이 자동으로 실행됩니다. Mech-Center 로그는 다음과 같이 표시하며 Mech-Vision은 캘리브레이션을 위해 해당 파라미터를 설정할 수 있습니다.
Mech-Vision 캘리브레이션 도구를 열기¶
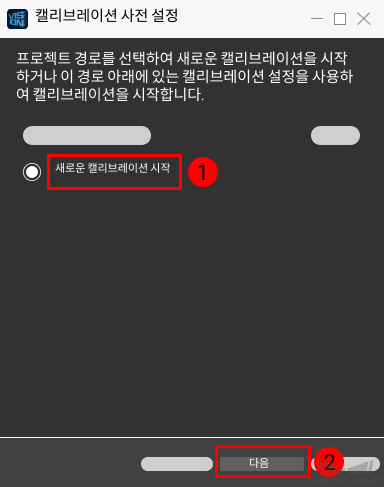
Mech-Vision 소프트웨어를 시작하고 을 클릭하여 캘리브레이션 도구를 엽니다.

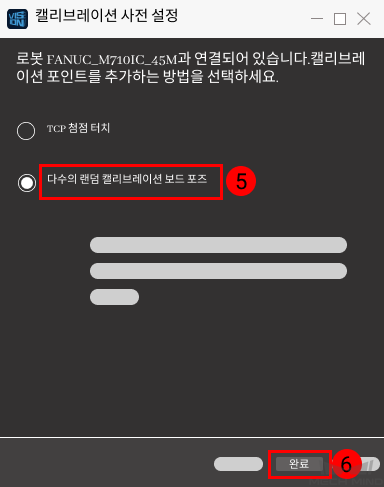
새로운 캘리브레이션 시작 을 선택하고 캘리브레이션 설치 방법을 선택한 다음 다수의 랜덤 캘리브레이션 보드 포즈 를 선택하여 캘리브레이션 인터페이스로 들어갑니다.

힌트
로봇이 감지되지 않으면 연결이 비정상적인 것이므로 로봇 프로그램을 다시 실행하십시오.
파라미터 설정 및 캘리브레이션 프로세스 실행¶
캘리브레이션 도구의 스텝을 따르고 캘리브레이션 파라미터를 설정한 후 설정된 경로에 따라 로봇을 이동하고 캡처하기 를 클릭합니다.
주의
로봇이 60초 이내에 다음 캘리브레이션 지점에 도달하지 않으면 Mech-Vision에서 시간 초과 오류 메시지를 보냅니다. 이 경우 로봇에서 mm_module.src를 다시 선택하고 Mech-Vision 프롬프트에 따라 캘리브레이션을 다시 시작해야 합니다.