YASKAWA 초기 설정¶
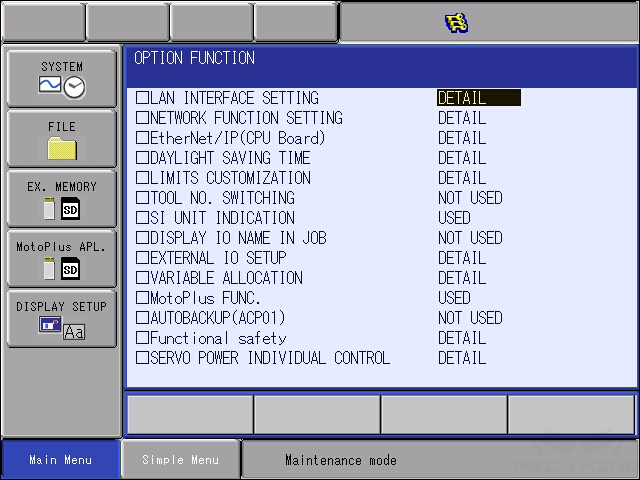
YASKAWA 로봇이 MotoPlus 응용을 사용할 수 있는지를 확인하기¶
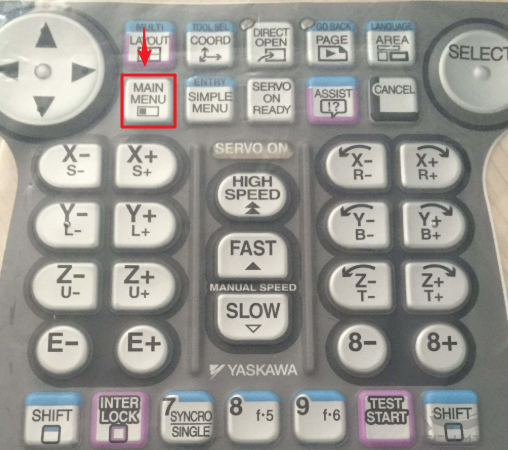
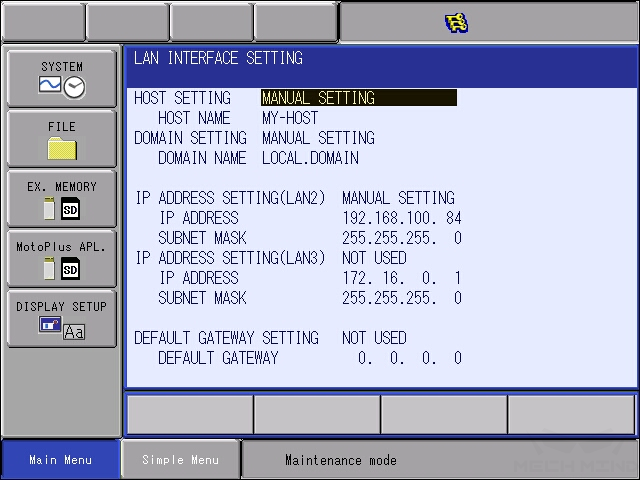
유지보수 모드로 들어가세요: 로봇의 전원이 꺼진 후 로봇의 전원이 다시 켜질 때까지 티칭 머신 Main Menu 키를 계속 누르세요.
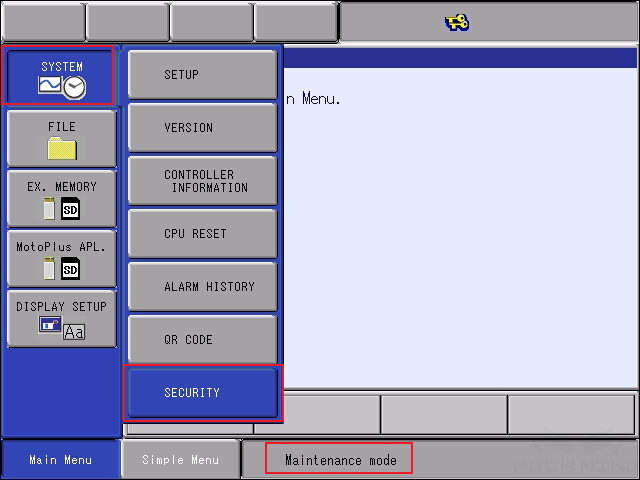
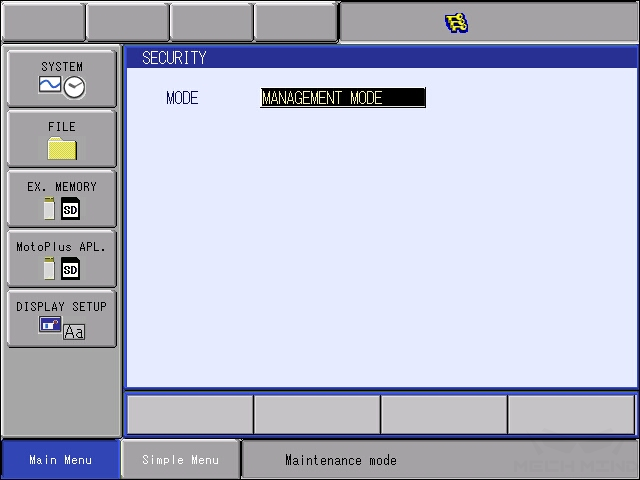
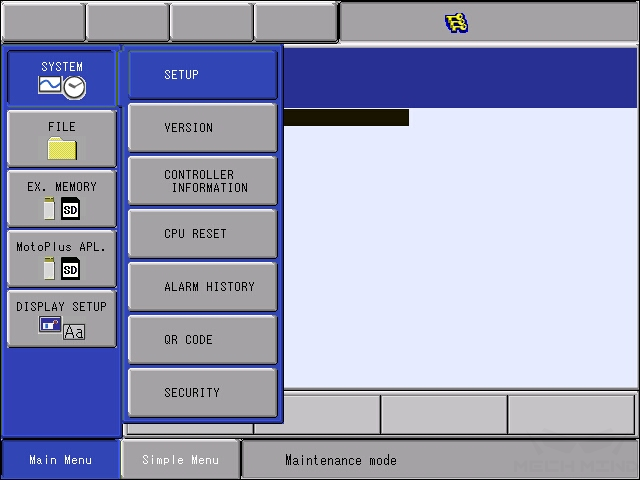
관리 모드로 들어가세요: 유지보수 모드 하에 순으로 System → Security Mode 를 클릭하고 관리 모드를 선택하여 20 개의 9 를 비밀번호로 입력하세요.
YASKAWA 제어 장치 프로그램을 설치하기(DX200)¶
참고
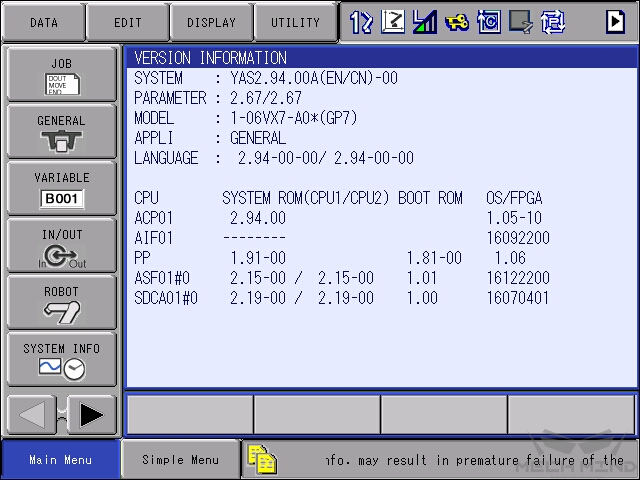
YASKAWA DX200 제어 장치 시스템의 버전에 대한 가장 낮은 요구: DN2.25.00A(US/CN)-00.
주의
이 버전보다 낮으면 모션 제어 기능을 호출할 수 없으며 시스템을 실행할 때 경고 알림이 나타날 것입니다.
Main Menu 키를 누르는 동시에 Main Menu의 전원 공급 버튼을 켜서 유지보수 모드로 들어가세요.
관리 모드로 들어가세요: 비밀번호(9를 길게 눌러 빈 칸을 채움).
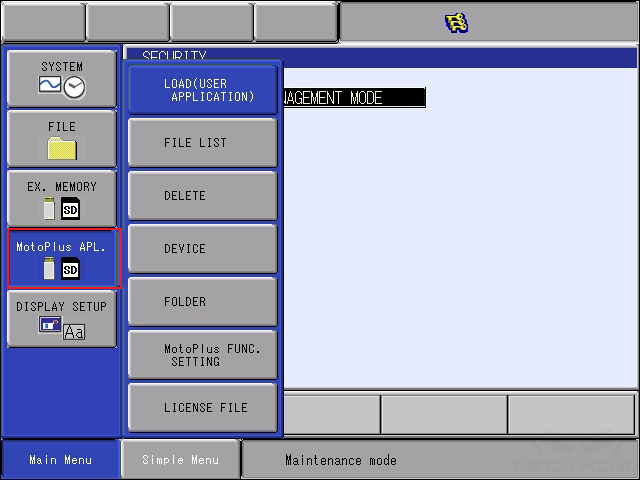
제어 장치의 프로그램을 USB로 복사하고 (USB는 FAT32 파일 시스템으로 포맷되야 함) 티칭 머신으로 삽입하여 MotoPlus 응용에 있는 설치 를 클릭하여 애플리케이션을 설치합니다.
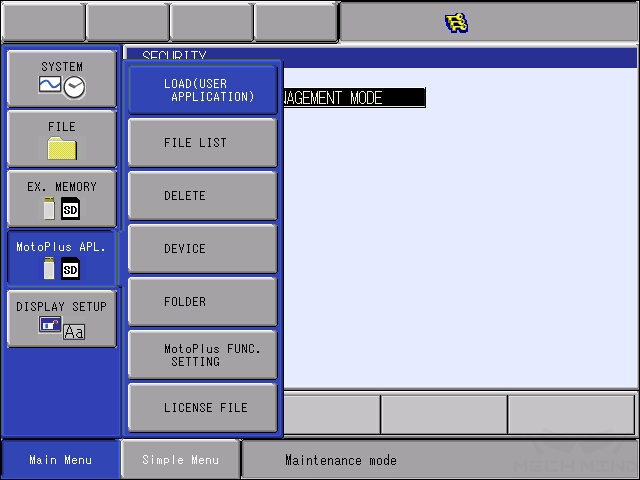
프로그램을 설치하기를 선택하세요.
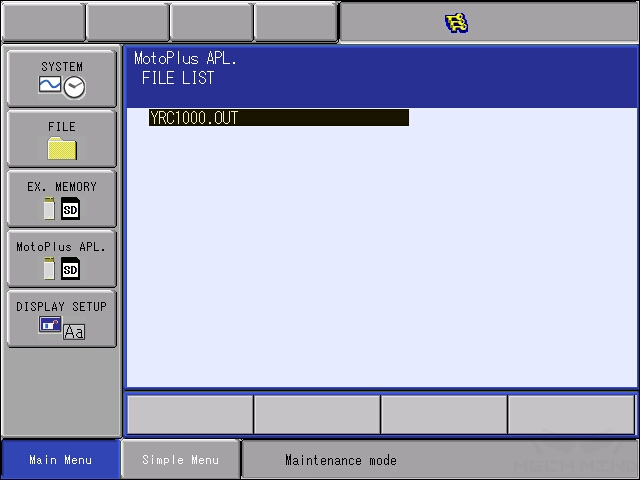
설치한 다음에 DX200의 전원 공급 버튼을 눌러 제어 장치를 다시 작동합니다(메인 메뉴 키를 누를 필요 없음).
YASKAWA 로봇의 IO¶
YASKAWA 로봇의 제어 캐비닛은 CN306、CN307、CN308와 CN309 네 가지 배선 포트가 있습니다.
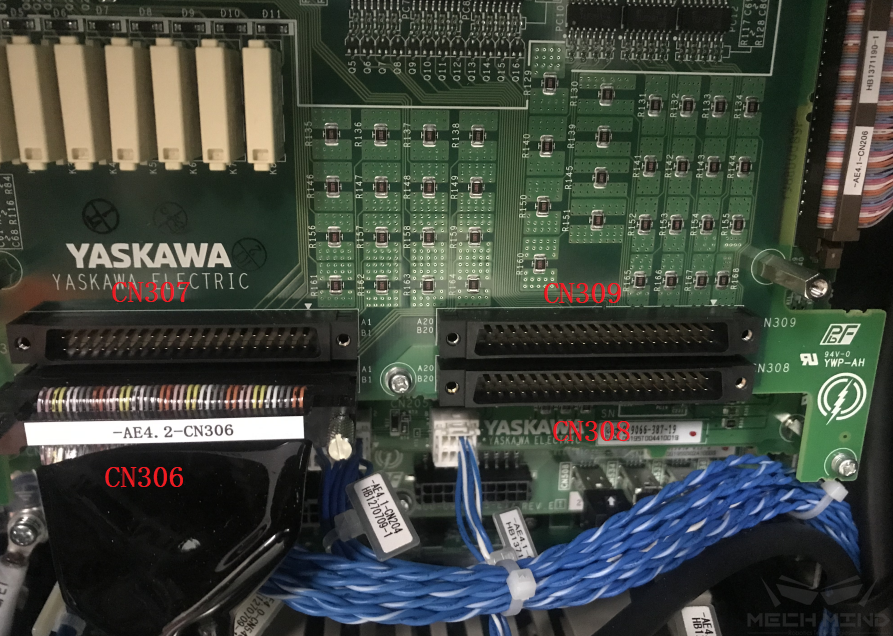
대응하는 IOㄴ 다음과 같습니다:
CN306 1
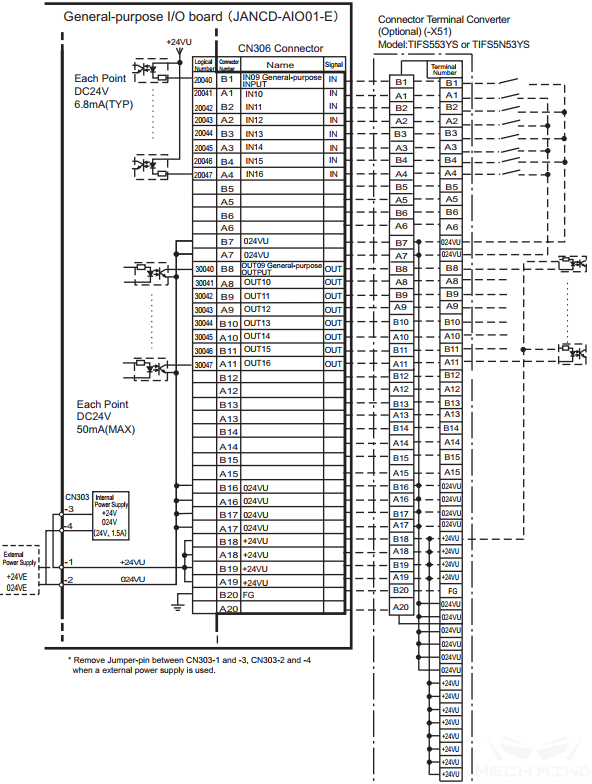
CN307 1
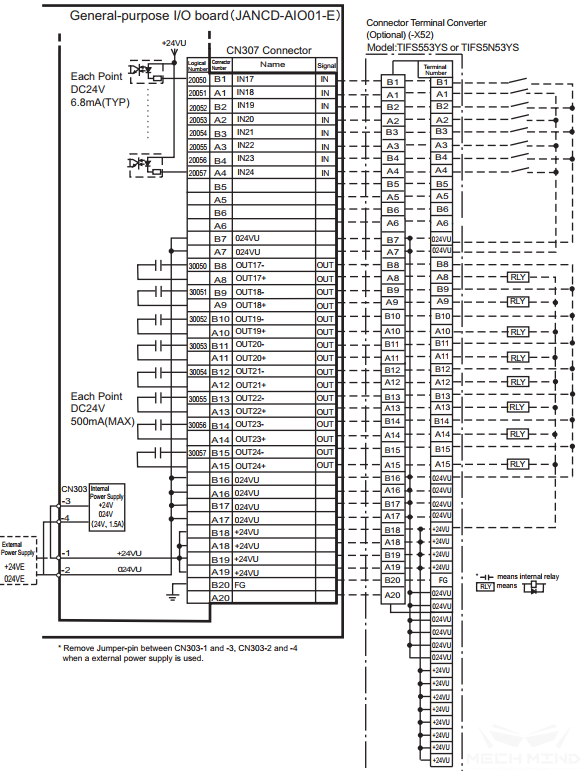
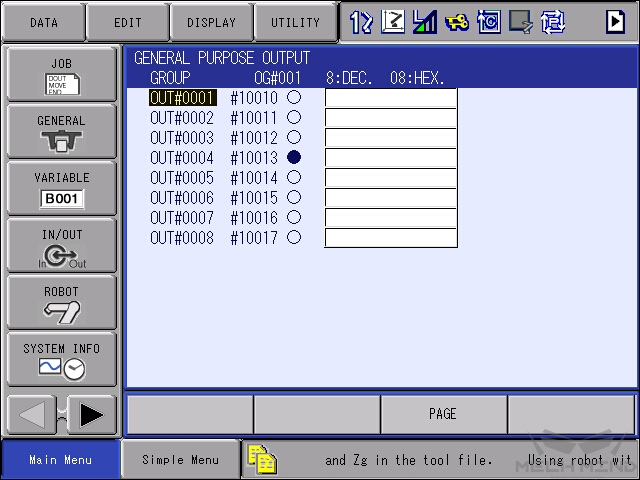
CN309 입출력 포트를 예로 들어 설명합니다.

로봇 티칭 머신에서 표시되는 일반적인 출력 포트 번호는 #10010~#10017 (CN309의 B10 OUT01~A13 OUT08과 연결됨) 이며 각각 Mech-Viz의 0~7 번 DO 포트에 대응됩니다.
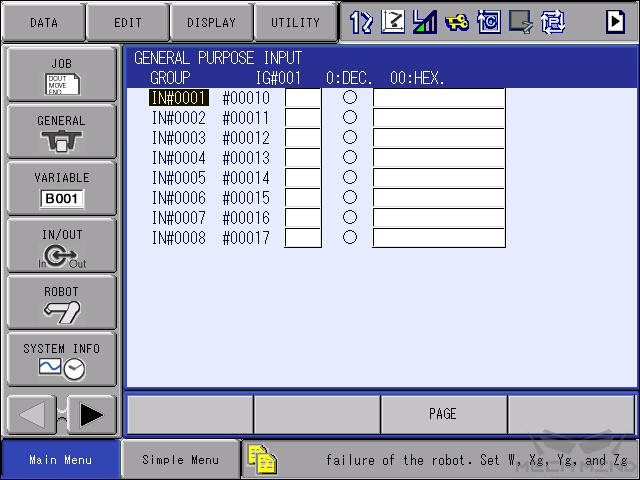
입력 포트 번호는 00010~00017 (CN309의 B3 IN01~A6 IN08과 연결됨) 이며 각각 Mech-Viz의 0~7번 DI 포트에 대응됩니다.
주의
YASKAWA는 저 레벨 신호를 출력할 때 부하의 음극을 OUTPUT 포트에 연결하고 양극을 +24VU에 연결해야 합니다.
참고 문헌: