UR¶
UR 로봇에 프로그램을 복제할 필요가 없습니다. 로봇과 IPC 간의 정상적인 통신만 확보하면 됩니다.
참고
정상적인 통신을 확보하기 위해 IPC의 방화벽을 닫거나 Mech-Center 프로그램을 방화벽 화이트 리스트에 추가할 필요가 있을 수 있습니다.
연결 프로세스¶
로봇의 전원을 켜고 웰컴 인터페이스에 들어가세요.
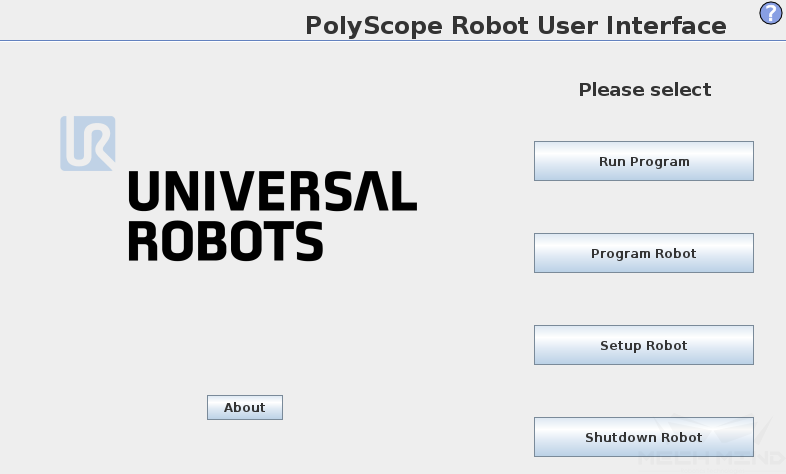
처음으로 로봇을 사용할 때 로봇에 대해 설정해야 합니다. Setup Robot 를 클릭하여 설정 페이지로 들어가세요.
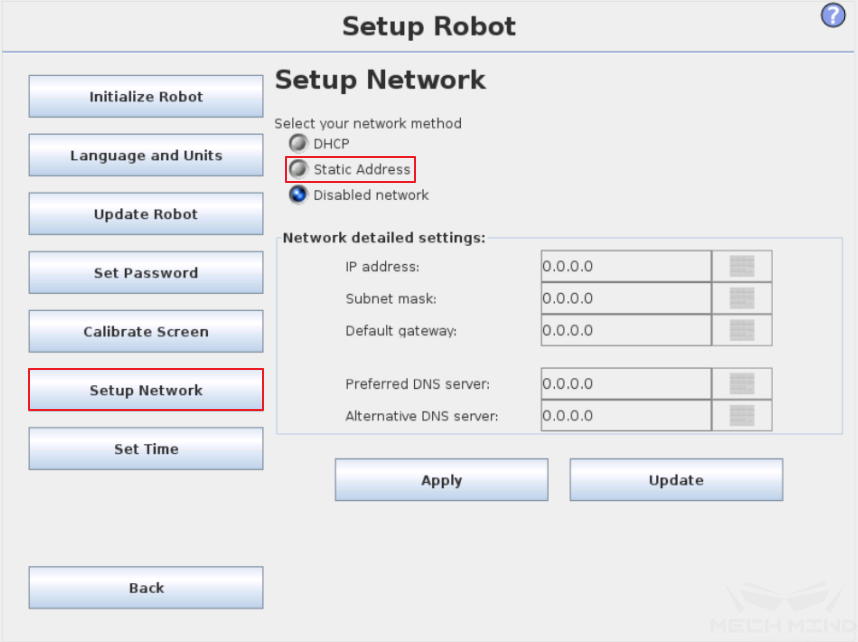
1.로봇 IP를 설정하기¶
Setup Network 를 클릭하여 네트워크 설정 페이지로 들어가세요. 다음으로 Static Address 를 선택하여 IPC와 동일한 네트워크 세그먼트에 있는 IP주소를 입력하면 됩니다.
로봇의 IP주소만 보려면 About 를 클릭하여 직접 확인할 수 있습니다.
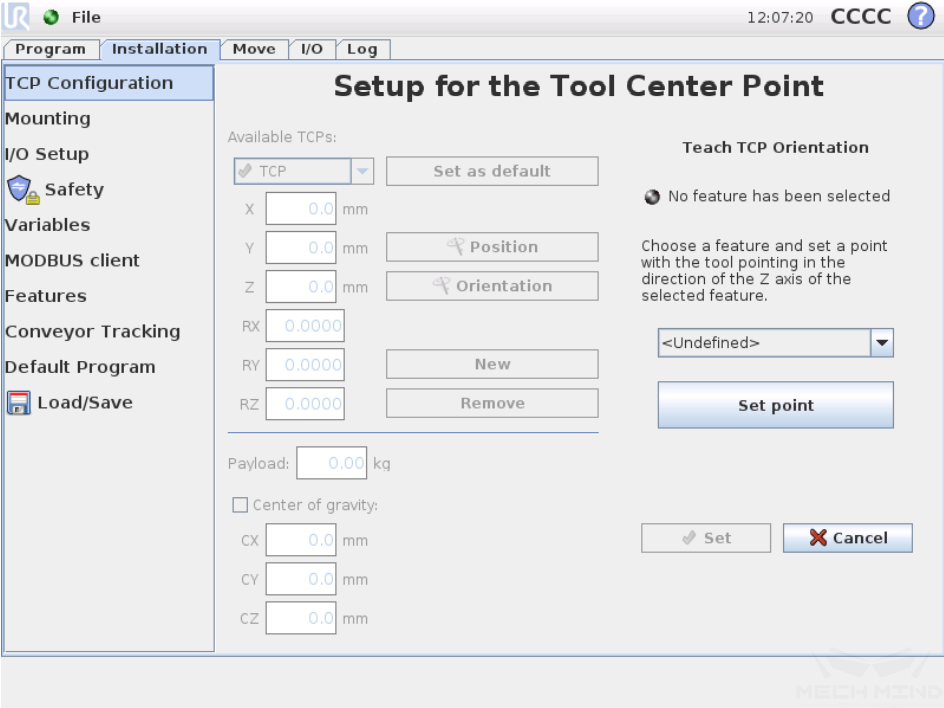
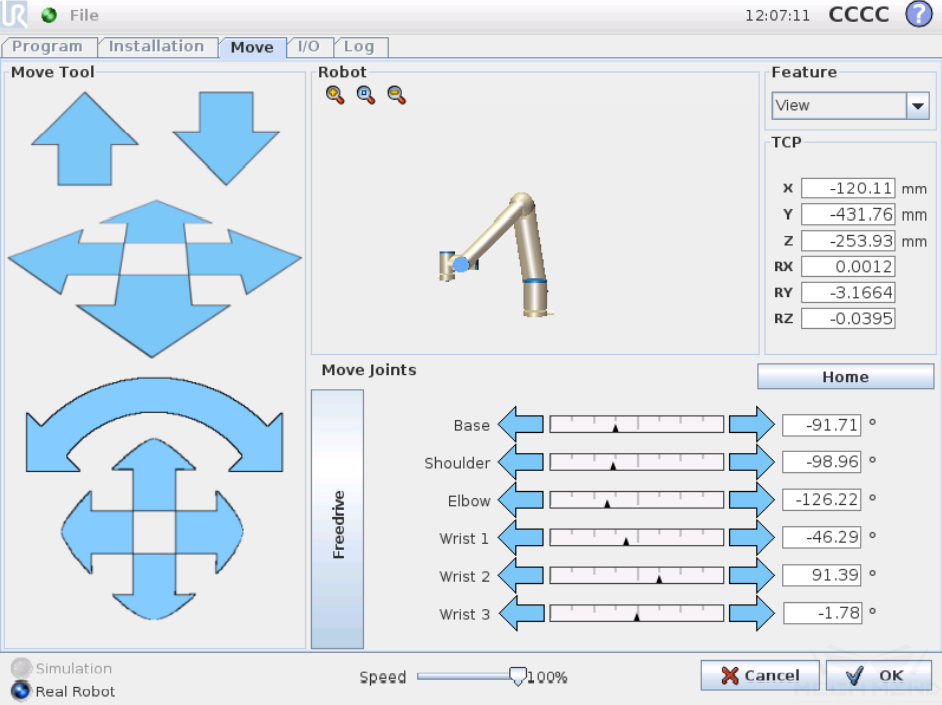
2.로봇의 TCP를 설정하기¶
로봇의 TCP를 재정의하려면 Initialize Robot 를 클릭하여 프로그램 실행 인터페이스로 들어간 후 TCP Configuration 를 선택하여 로봇의 TCP 좌표계를 설정하면 됩니다.
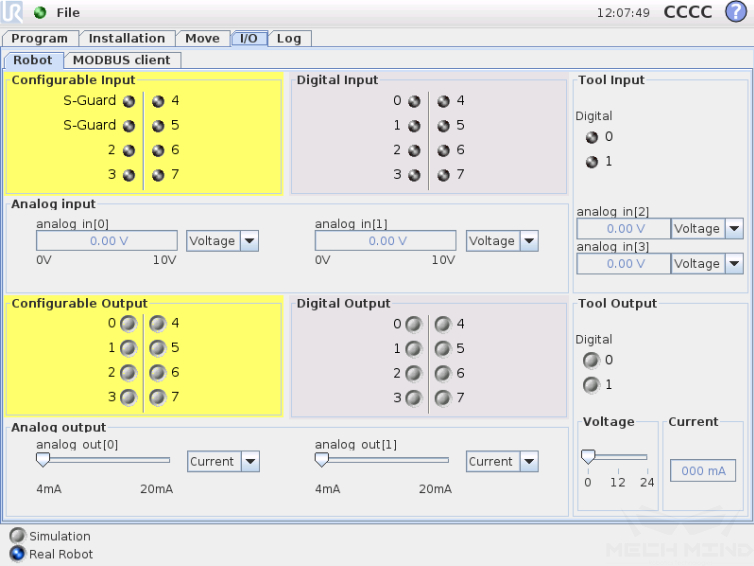
3.로봇 IO를 설정하기¶
메인 인터페이스로 돌아가 Run Program 을 클릭하세요. 파일 페이지에 들어간 후에 I/O 태그 페이지를 선택하여 로봇의 클램프 제어, 센서 신호 수신 등을 위한 DO 및 DI 포트를 구성할 수 있습니다.
5.프로그램을 실행하기¶
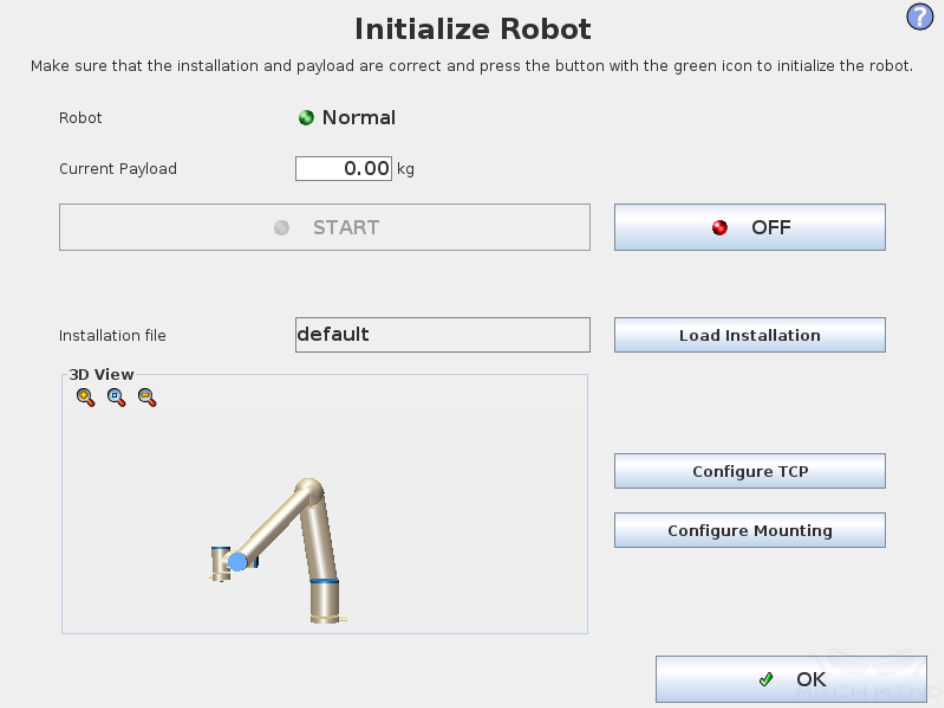
Setup Robot 페이지에서 Initialize Robot 를 선택하거나 직접 파일 페이지 왼쪽 위에 있는 ![]() 버튼을 눌러 초기화 페이지로 들어가세요.
버튼을 눌러 초기화 페이지로 들어가세요.
On 을 클릭하여 로봇의 전원을 켜세요. 로봇의 상태가 OFF 로 표시되면 start 를 클릭하세요.
모든 브레이크가 해제되고 상태가 Normal 로 표시될 때 Start 를 클릭하면 Mech-Center와 연결할 수 있습니다.