ROKAE 초기 설정¶
티칭 머신의 버튼 및 인터페이스¶
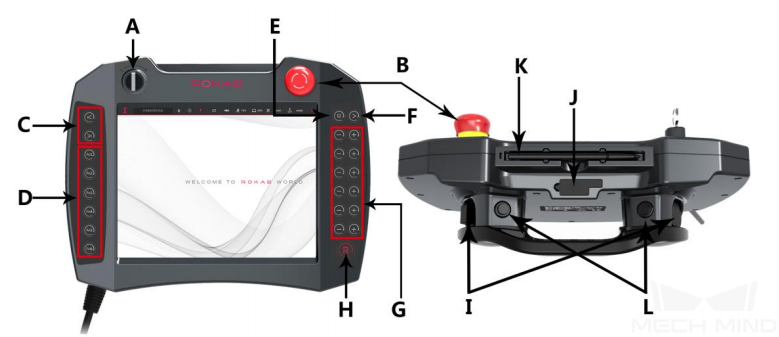
A:모드를 선택할 수 있는 키 버튼입니다. 로봇의 작업 모드롤 전환하는 데에 쓰입니다.
B:긴급 중지 버튼입니다. 위험한 상황이 나타날 때 로봇을 긴급 중지하는 데에 쓰입니다.
C:싱글 스텝 실행 버튼입니다. 이전 혹은 다음 한 스텝으로 명령어 하나를 실행하므로 로봇 프로그램을 디버그하는 데에 쓰입니다.
D:사용자 정의 버튼입니다. 사용자들은 모든 버튼에 대해 특별한 기능을 따로 정의할 수 있습니다. 단 fn1,fn2 및 fn6은 이미 사용됐기 때문에 따로 정의할 수 없습니다.
E:종료 버튼입니다. 로봇 프로그램을 종료하는 데에 쓰입니다.
F:시작 버튼입니다. 로봇 프로그램을 작동하는 데에 쓰입니다.
G:Jog 버튼입니다. 6 그룹에 총 12개가 있으며 로봇의 6개의 관절 또는 데카르트 공간의 6개의 자유도에 해당합니다.
H:R 버튼입니다. 자동 모드 ㅎ에 모터의 전원을 켜는 데에 쓰입니다.
I:3위치 활성화 버튼입니다. 수동 모드 하에 로봇의 운동을 활성화하는 데에 쓰입니다.
J:USB 인터페이스입니다. 고무 덮개로 보호되고 USB를 연결하는 데에 쓰입니다.
K:터치 펜 홈입니다. 터치 펜을 보관하는 데에 쓰입니다.
L:예비 버튼입니다. 후속 기능을 추가하면 쓰일 것입니다.
로봇 프로그램 복제¶
1.복제할 파일에 대한 설명¶
Mech_RobServrokae 에 3개의 로봇의 프로젝트(main.mod)가 포함되어 있숩니다. 이 중에:
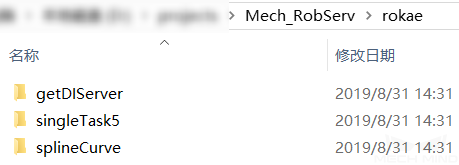
singleTask5는 가장 많이 사용되는 프로젝트이고 로봇의 《운동 제어》 및 《DO 획득》 기능이 가능하게 합니다.
splineCurve 는 특별히 플칠을 위해 개발된 singleTask5의 업그레이드된 버전입니다; singleTask5 및 splineCurve 둘 중에 하나를 선택하면 됩니다;
getDIServer는 로봇의 DI를 획득할 때 필수적인 서비스 프로그램입니다. singleTask5 + getDIServer를 동시에 사용하려면 로봇에서 멀티 태스크 권한을 열어야 합니다.
2.USB를 십입하기¶

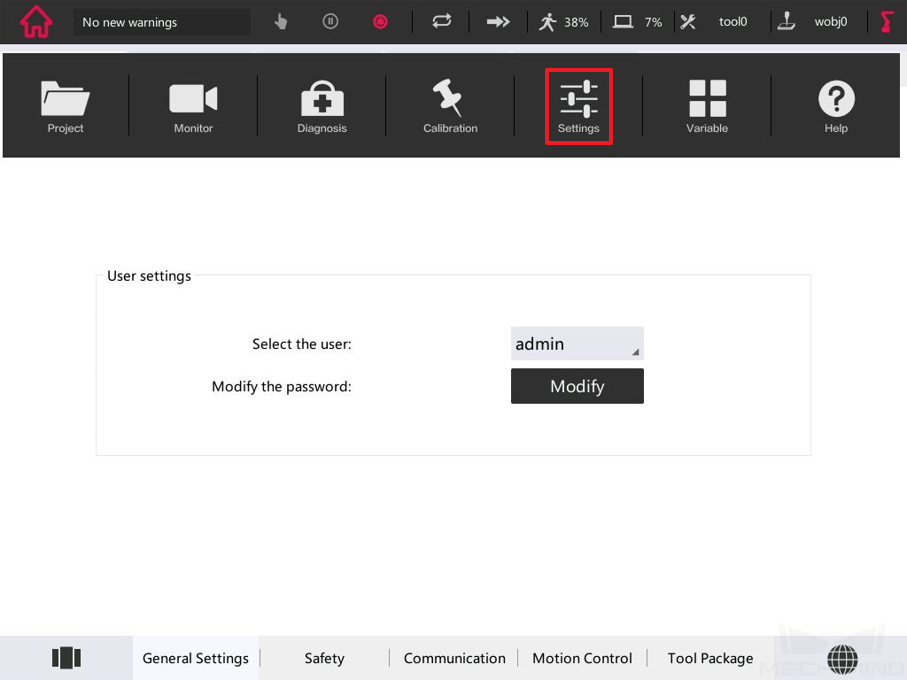
3.admin 권한으로 전환하기¶
제어판- 사용자 그룹 에서 권한을 전환하세요 .
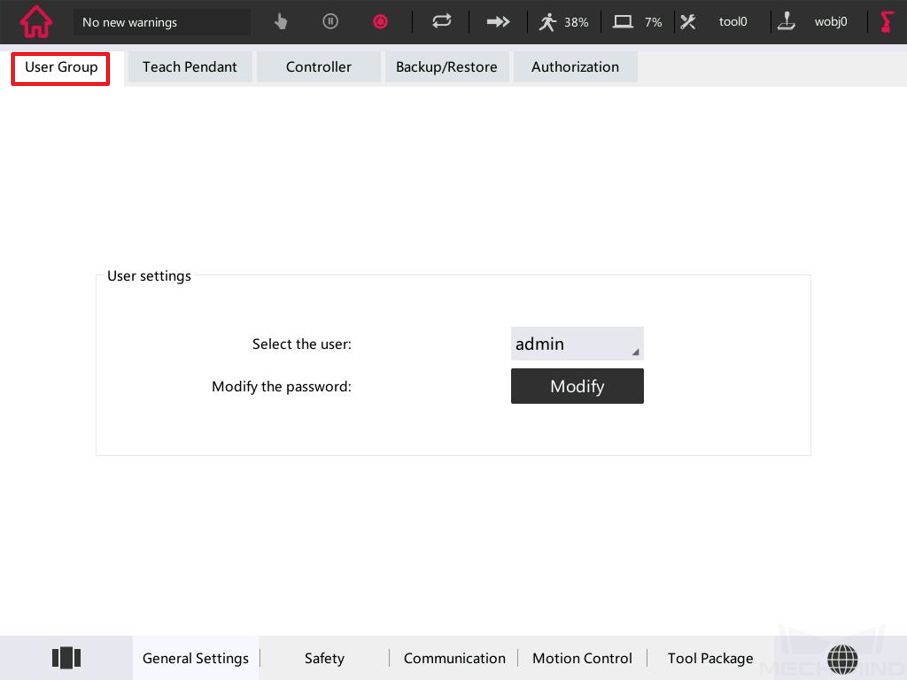
비밀번호는 123456으로 입력하세요. 다음으로 project 를 클릭하여 지난 페이지로 돌아가세요.
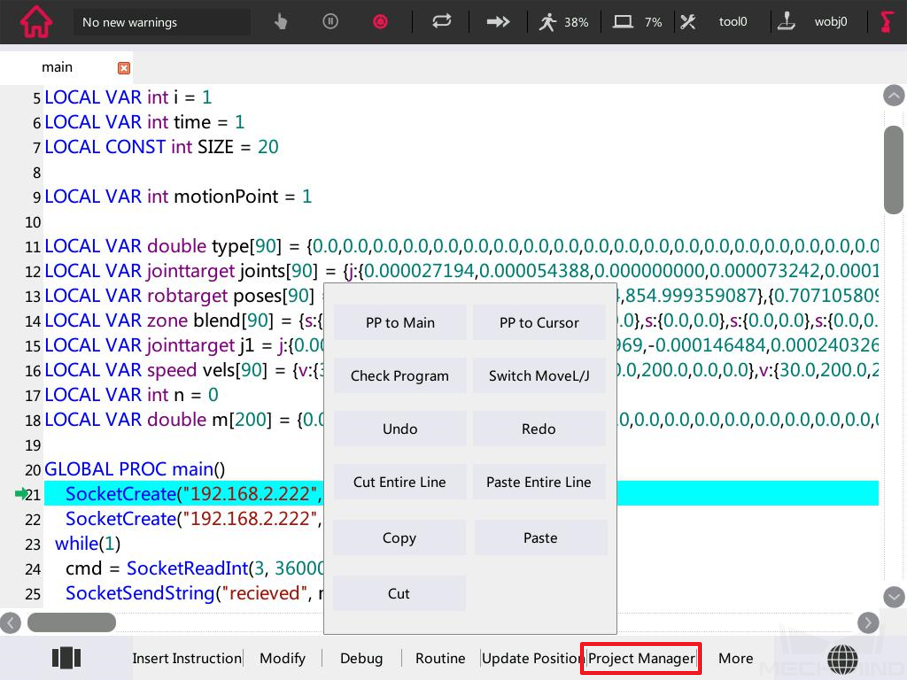
4.복제할 프로그램을 들여오기¶
다음 그림과 같이 Resource manager 를 클릭하세요.
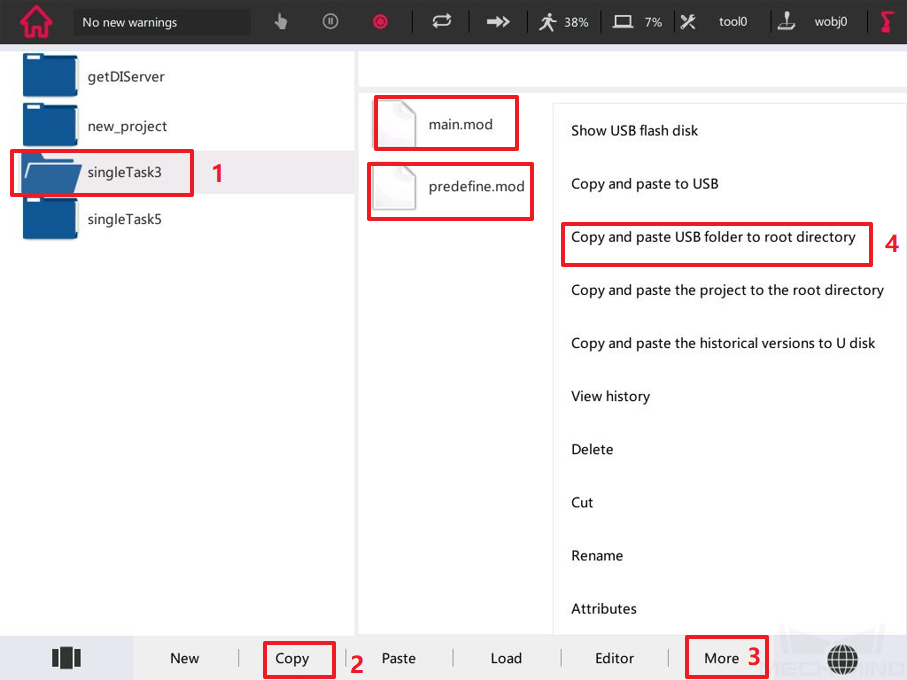
복제할 폴더를 클릭하며 안에 main.mod 및 predefine.mod 두 파일이 있습니다. 다음으로 아래 그림이 보여준 스텝ㅇ 따라 하세요.
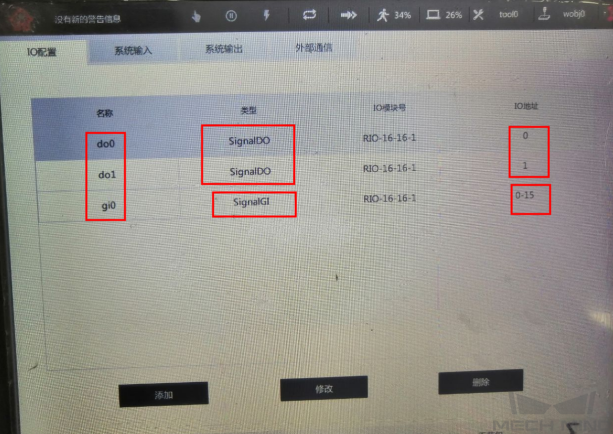
5.로봇의 IO신호를 구성하기¶
모든 IO신호의 구성은 제어판에 있는 페이지에서 진행됩니다. 다음 그림이 보여주는 대로:
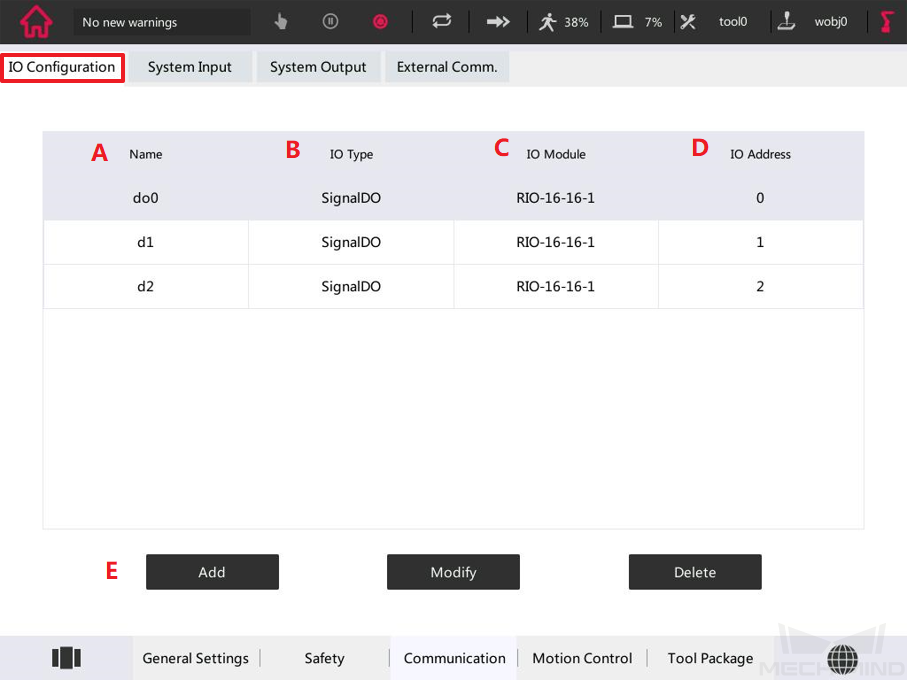
A:입/출력 신호의 명칭입니다. “New” 혹은 《Modify》를 할 때 수정할 수 있습니다.
B:신호의 유형입니다. SignalDI、SignalGI、signalDO、SignalGO 등 있습니다.
C: IO 모듈 번호입니다. ROKAE에서 제공한 표준 IO 모듈일 수 있고 Profinet 버스 혹은 Ehternet/IP 버스일 수도 있습니다.
D:주소 번호입니다. IO 신호 매핑에 해당하는 물리적 주소 번호이며 0부터 계산됩니다.
E:기능 버튼들입니다. IO 신호를 새로 만들거나 수정/삭제할 수 있습니다.
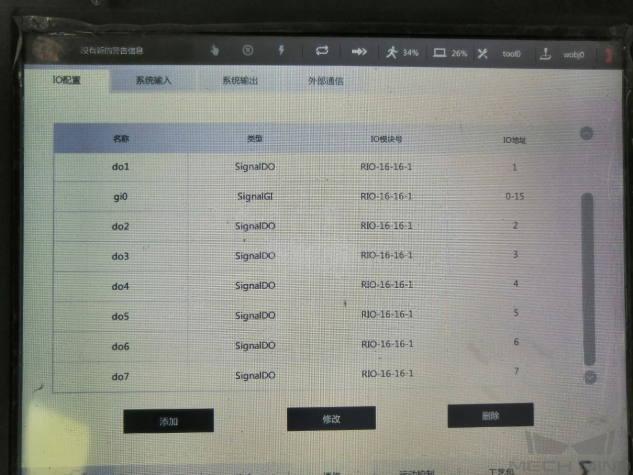
수동으로 다음과 같은 내용을 입력하세요:
다음 그림에서 볼 수 있듯이 SignalDO 가 do0 부터 구성하며 최대 do7 까지 가능합니다. 즉 가장 많은 결우에 8개의 SignalDO 를 제어할 수 있다는 뜻입니다. gi0 은 한 그룹에 총 16개의 SignalDI 를 뜻합니다. 로봇의 멀티 태스크 권한을 열어서 getDIServer 프로젝트와 함께 실행하면 됩니다. 만약에 singleTask5만 사용하면 로봇의 SignalDI 값을 읽을 수 없습니다.