Kawasaki 초기 설정¶
티칭 머신 버튼의 기능에 개한 소개¶

순환
수동
포어그라운드 프로그램
포어그라운드 프로그램 현재 스텝
백그라운드 프로그램
실행/중지
모터 잠금 열림
순환 시작
메뉴 키
돌아가기
확인
Shift
Shift
중지/계속 실행
로봇 IP를 수정하기¶
Kawasaki 로봇의 IP를 쉽게 수정할 수 있으며 수정한 다음 로봇을 다시 작동할 필요가 없이 바로 적용됩니다. 구체적인 스텝은 다음과 같습니다:
Menu Key → Auxiliary Function → System→ Network setting 을 순으로 클릭하세요.
로봇 프로그램을 복제하기¶
Mech_RobServ 안에 있는 mechmind_server.as 를 USB의 루트 목록으로 복사하고 로봇 제어 캐비닛에 삽입한 다음에 티칭 머신에서 프로그램을 복제하면 됩니다.
프로그램 복제를 처음으로 할 새로운 로봇이라면 파일 복제 스텝으로 넘어가도 됩니다. 당사의 제어 프로그램을 기반으로 프로그램을 업데이트하는 경우 다음 설명에 따라 기존 프로그램을 종료하세요. 그렇지 않으면 프로그램 복제를 완료할 수 없습니다.
프로그램을 종료하는 구체적인 스ㅌ은 다음과 같습니다:
1.티칭 머신과 제어 캐비닛ㅇ 수동 모드로 전환하세요.
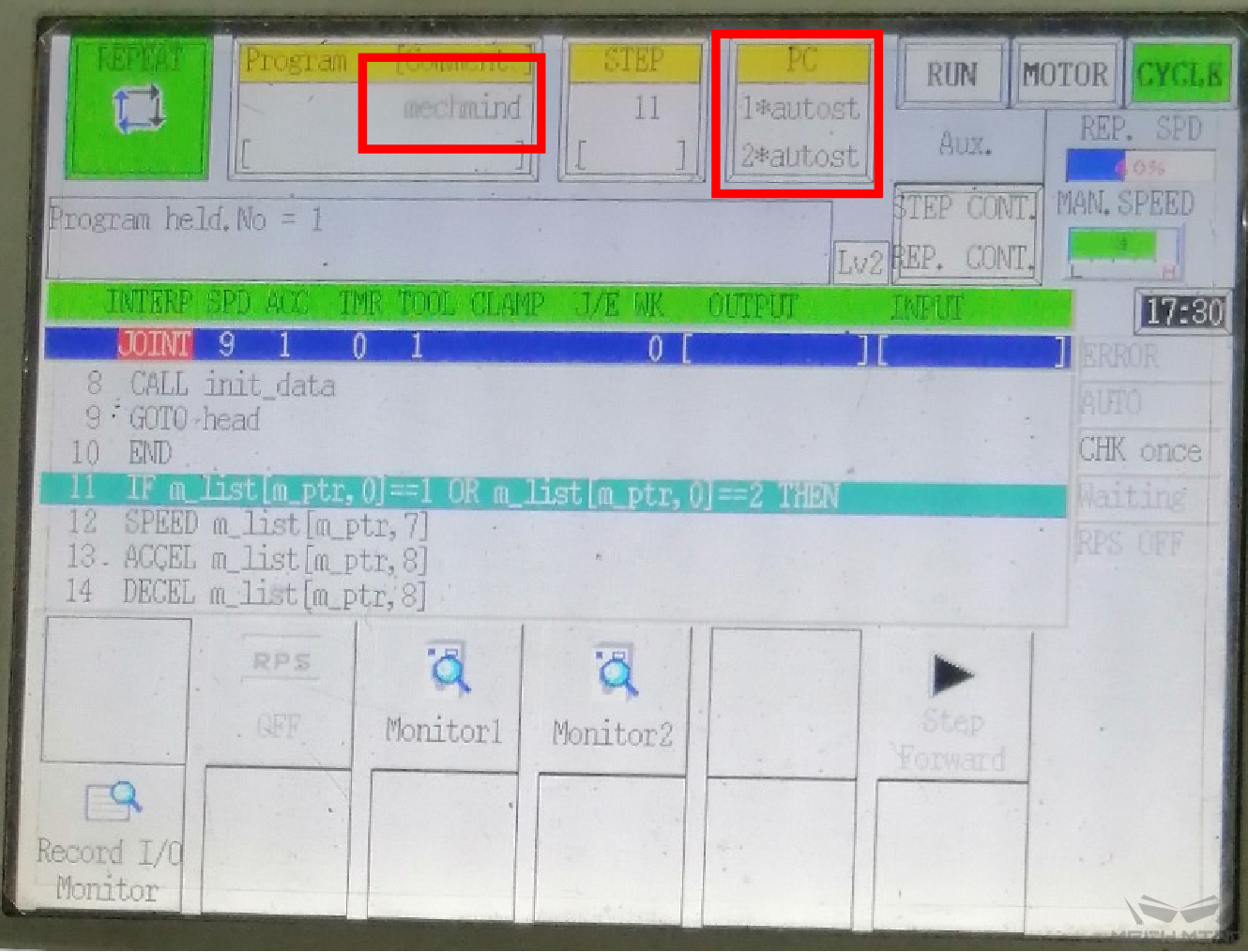
2.Menu → Auxiliary Function → System → PC Program Start/Stop → Execution-interruption → Login(PC 프로그램1을 중지하기)→ PC 프로그램 번호를 2로 수정하여 → Login(PC 프로그램2을 중지하기)→ R Return → Logout → Login(PC 프로그램 1에서 로그아웃)→ PC 프로그램 번호를 2로 수정하여 → Login(PC 프로그램 2에서 로그아웃)→ R Return →(터치 스크린)Foreground Program → 편집 표시줄에서 Cancel Login 을 선택하세요.
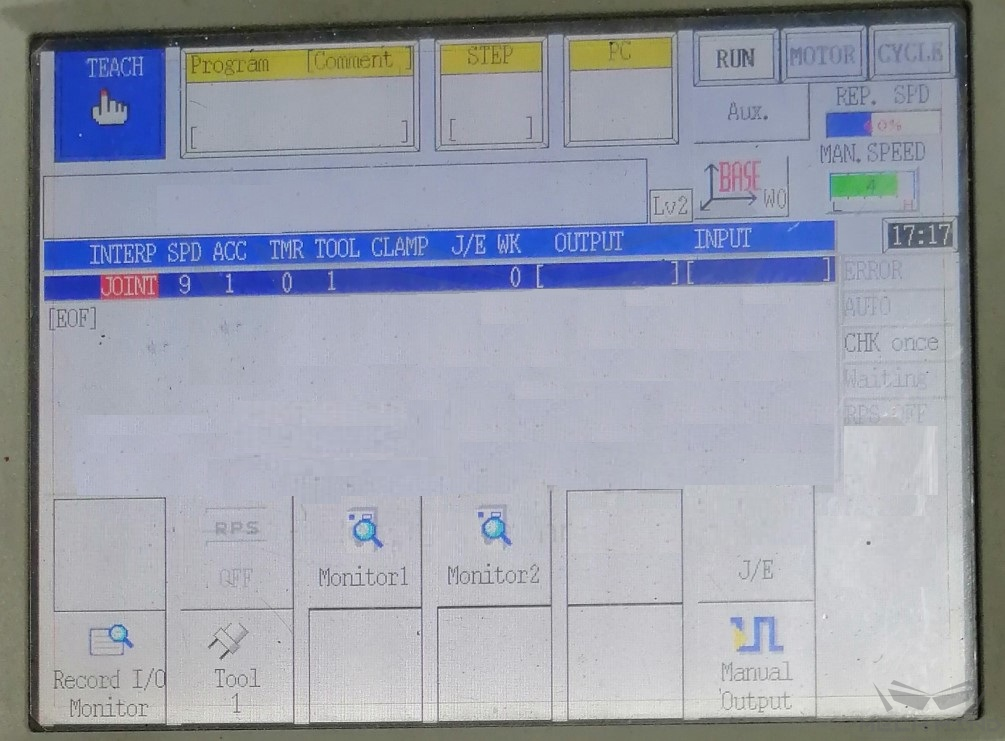
티칭 머신의 상태가 다음과 같으면 프로그램 복제가 이미 준비되었음을 의미합니다.
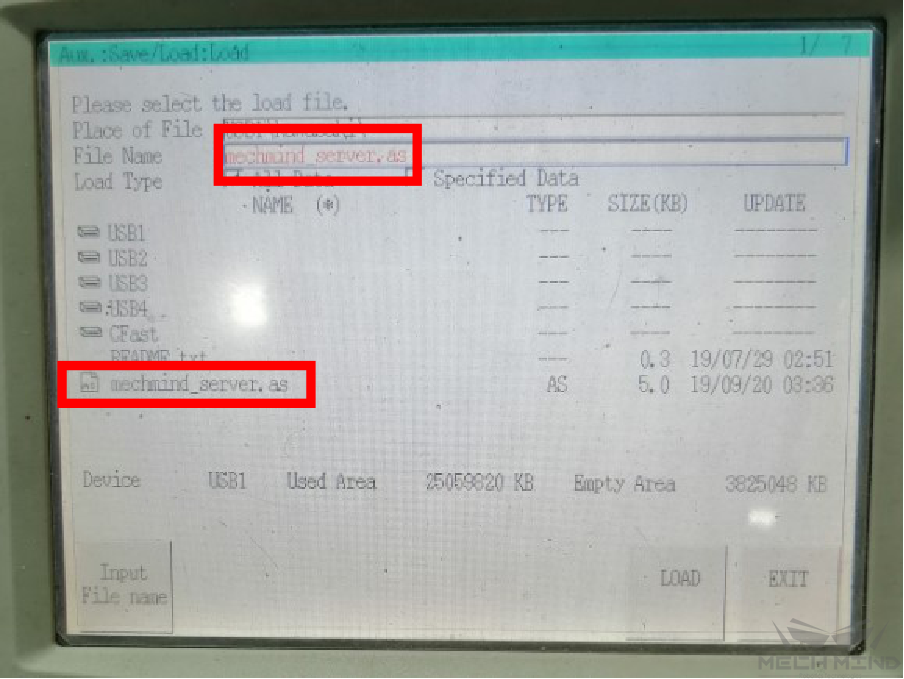
파일 복제의 구체적인 스텝은 다음과 같습니다: 로봇 프로그램을 담는 USB를 제어 캐비닛으로 삽입하기 → 티칭 머신 Menu → Auxiliary Function → 2.Save/Load → 2.Load
다음과 같은 페이지가 나타나면 터치 스크린에서 mechmind_server.as 더블 클릭하여 르드하세요.
로딩이 모두 성공한 것을 확인하기 위해 로딩 로그를 유심히 살펴보아야 합니다.
프로그램 복제를 완료한 로봇의 프로그램 리스트에서 두 개의 Autostart.PC 프로그램과 하나의 main 포어그라운드 메인 프로그램이 나타날 것입니다.