HYUNDAI 초기 설정¶
ㄱ. 네트워크 구성 및 로봇 연결¶
1.로봇 랜 케이블 연결 및 IP를 설정하기¶
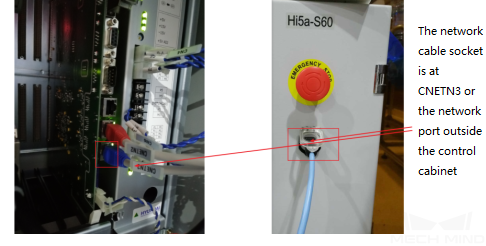
HYUNDAI 로봇의 네트워크 하드웨어 인터페이스는 일본산 로봇과 매우 비슷합니다. 모두 포트가 고정되어 있고 특정한 기능과 용도를 갖고 있습니다. 제어 캐비닛 내부에 CNETN1、CNETN2 및 CNETN3 총 세 개의 네트워크 포트가 있으며 각각 티칭 머신의 EN0주소、TP주소 및 EN2 사용자 이더넷 주소에 대응합니다. 따라서 랜 케이블은 CNETN3 포트에 연결되어야 하고 수정이 끝난 뒤 로봇을 다시 작동해야 합니다. 설정 방법은 다음과 같습니다:
랜 케이블 조인트:
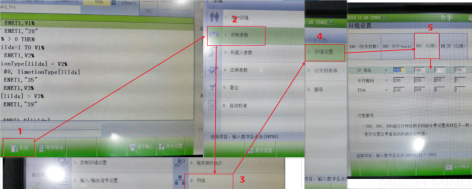
IP 주소 설정 스텝:
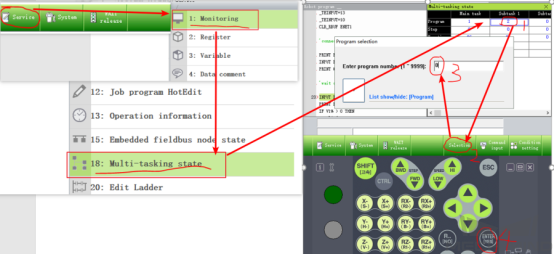
2.로봇 프로그램을 들여오기¶
HYUNDAI 로봇 프로그램을 들여올 때 주의해야 할 점은 “101.JOB” 및 “102.JOB” 파일에서 프로그램 초기의 로봇 모델 설명 부분을 수정해야 합니다. 자세한 정보는 다음과 같습니다:

로봇 모델 설명 파일을 로봇으로 복제하려면 로봇에서 새 프로그램을 따로 만들어야 합니다. 새 프로그램을 열어 최신의 설명 파일을 찾은 후 우리 쪽의 101과 102 프로그램의 시작 부분에 복사해야 합니다. 구체적인 스텝은 다음 그림과 같습니다:
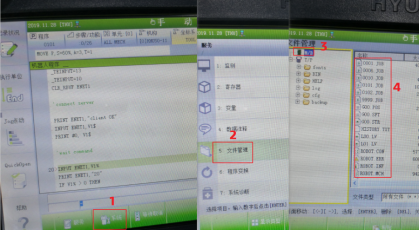
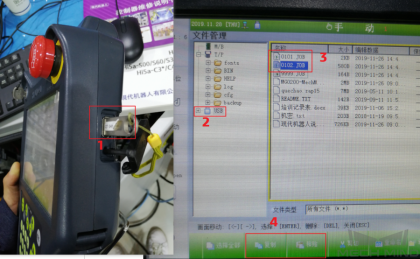
위 그림이 보여준 스텝을 이어 101과 102를 제외한 프로그램 중 하나를 복사하여 그안에 있는 로봇 설명 파일의 전체 줄을 우리 쪽의 101과 102 프로그램으로 복사하고 마지막으로 그 101과 102 파일을 로봇으로 복제할 폴더로 들여와야 합니다. 주의: 파일을 복사하는 방법과 경로는 다음과 같습니다:
3.HUB을 통해 로봇을 연결하기¶
HUBㄹ 통해 로봇을 연결하는 방법은 다음과 같습니다:
IPC의 네트워크를 192.168.0.150로 바꾸세요 (이 IP는 기본값으로 설정하세요. 이 IP는 101 및 102 복제 프로그램의 내용과 관련이 있어 스텝1에서 설정한 로봇 제어 캐비닛의 ETN2 네트워크 포트와 동일한 네트워크 세그먼트에 있으면 됩니다.).
라우터의 관리 IP를 192.168.0.1로 바꾸세요.
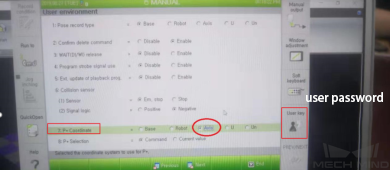
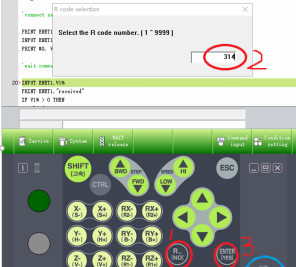
p* 관절 정보를 수정하세요. System - User Environment 아래에 있는 7번째 Coordinate에서 AXIS를 선택하세요. (티칭 머신에 있는 SHIFT 를 길게 누른 다음에 왼/오른쪽 키를 누르세요. 선택할 때 권한 부여를 요청해야 합니다. 오른쪽 사용자 비밀번호 창에 일반적인 권한 비밀번호 《314》를 입력하면 됩니다.).

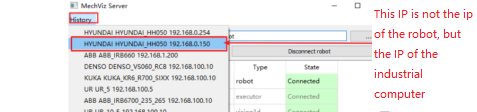
HUB를 통해 연결할 때 연결하는 IP는 로봇 IP가 아닌 IPC의 IP입니다. 다음 그림을 참고하세요:
주의
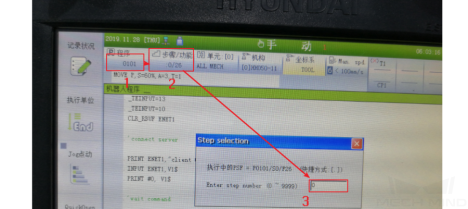
로봇을 연결할 때 반드시 HUB를 연결한 다음에 로봇 자동 연결을 설정해야 합니다. 순서가 틀리면 로봇을 연결할 수 없습니다. 로봇 자동 연결을 설정하기 전에 반드시 로봇의 101 및 102 프로그램 스텝을 0으로 설정해야 하며 102가 아닌 101 프로그램을 실행해야 합니다. 다음 그림을 참고하세요:
4.로봇을 다시 연결하기¶
티칭 모드 하에 권한을 획득하는 방법은 다음 그림과 같습니다:
HUB 로봇을 다시 연결할 때마다 백그라운드 태스크를 먼저 종료하고 프어그라운드 포인터를 0으로 돌려야 합니다. 구체적인 스테은 다음과 같습니다:
프어그라운드 프로그램 101 및 102의 스텝 포인터를 0으로 설정하여 마지막으로 이전과 같이 먼저 허브 터미널을 연 다음 로봇 프로그램을 실행하세요.
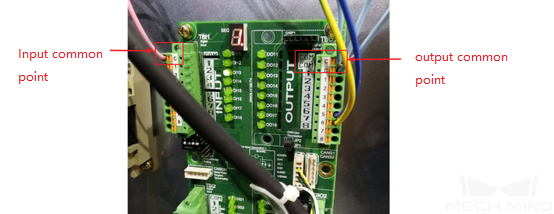
ㄹ.IO 신호선의 사용 방법¶
1.다른 로봇과 같이 현대 로봇도 자신의 IO보드를 갖고 있는데 그의 선 방식은 PNP입니다. 입력 보드의 한 오픈 포트에는 DC 0V에 연결되고 출력 보드의 두 개의 오픈 포트에는 DC 24V에 연결됩니다.
2.IO신호의 사용 방법은 다으 그림과 같습니다:
3.IO선이 연결한된 후에 신호에 대해 활성화 테스트를 하려면 아래 그림을 참고해서 하세요:
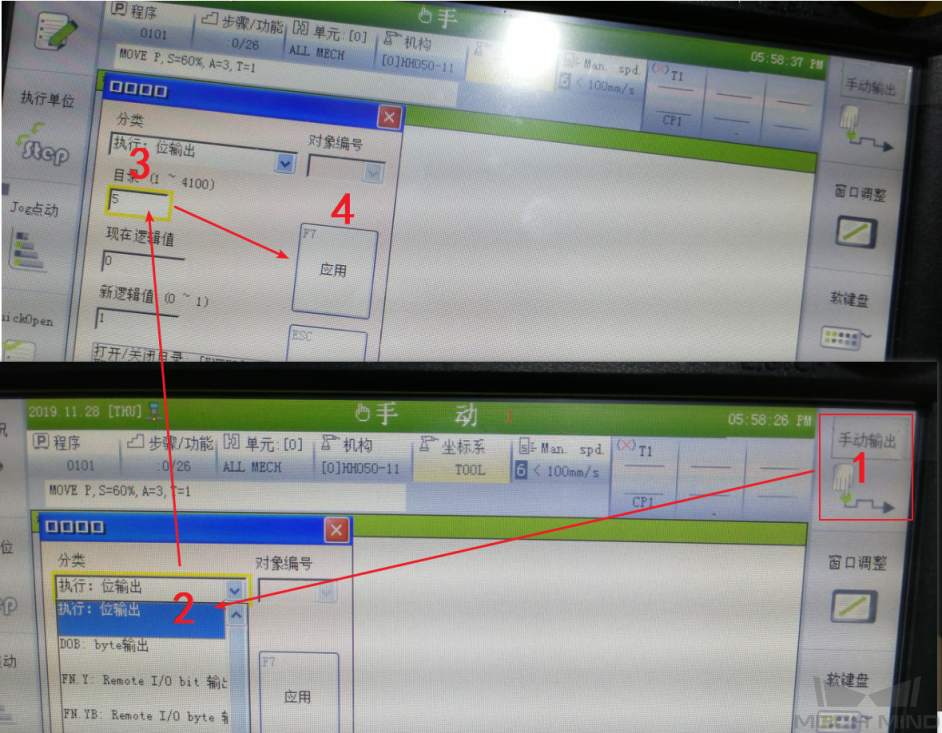
다섯 번째 주소 신호를 1 혹은 0으로 설정한 후 Apply 를 클릭하면 됩니다.