FANUC 초기 설정¶
FANUC 프로그램을 복제하기¶
1.제어 장치에 필수한 모듈이 모두 설치되었는지 확인하기¶
주의
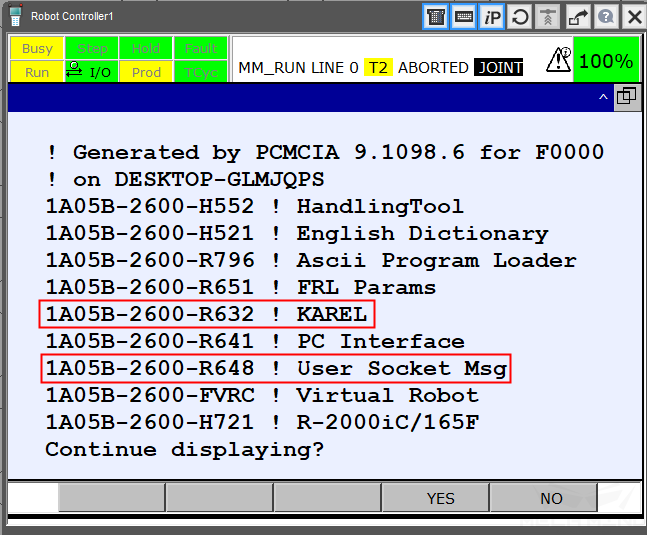
부가 컴포넌트 R632 (Karel)과 R648 (User Socket Msg) 훅은 R651 (Karel)과 R648을 선택하여 설치하세요.
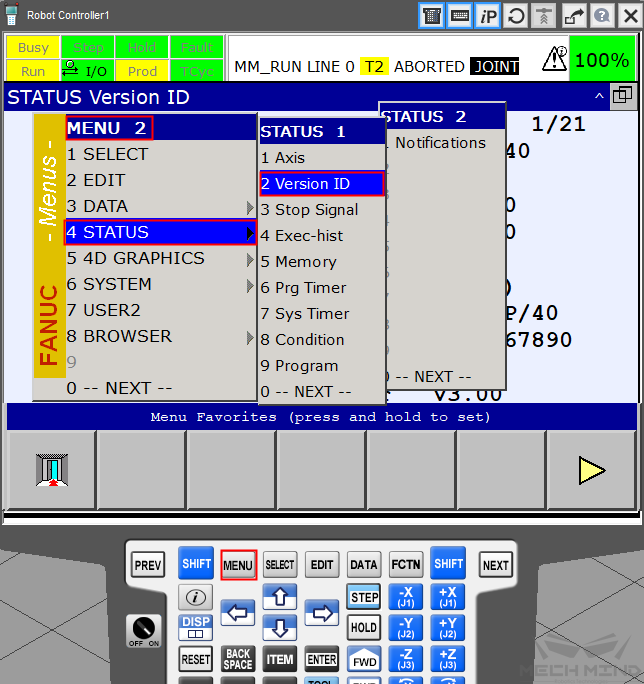
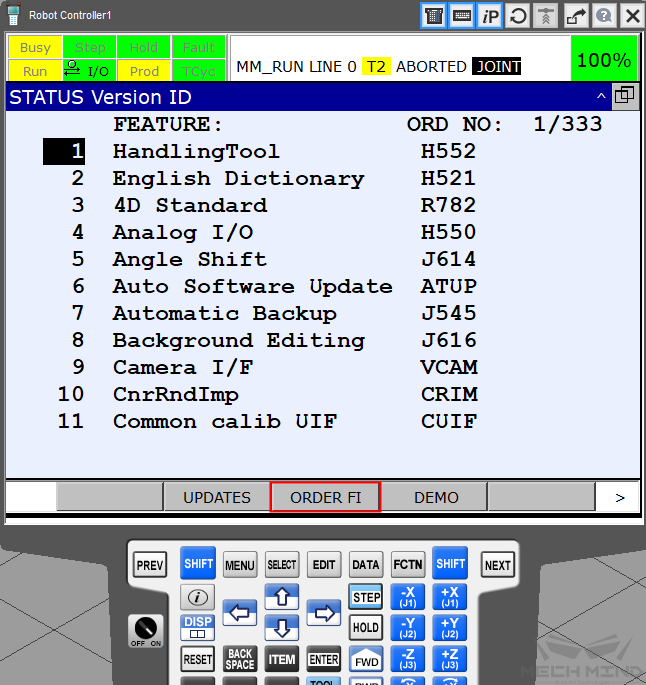
MENU → STATUS → Version ID → 주문 파일
2.로봇 프로그램을 복제하기¶
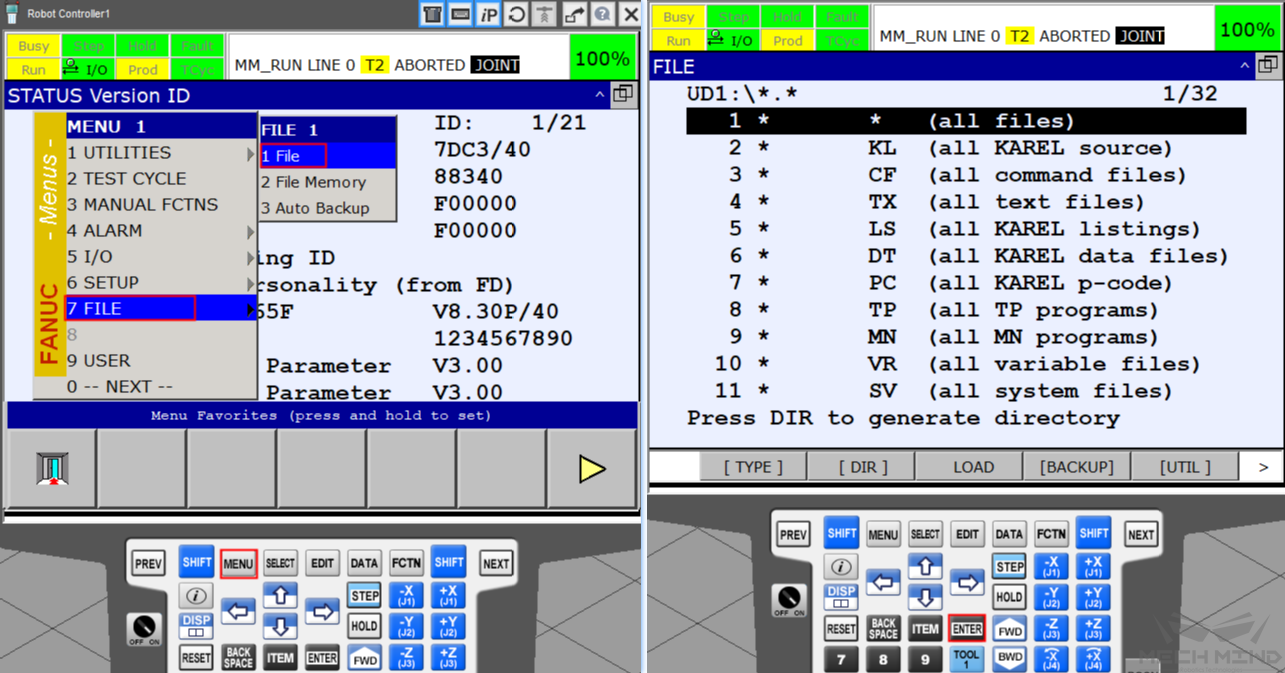
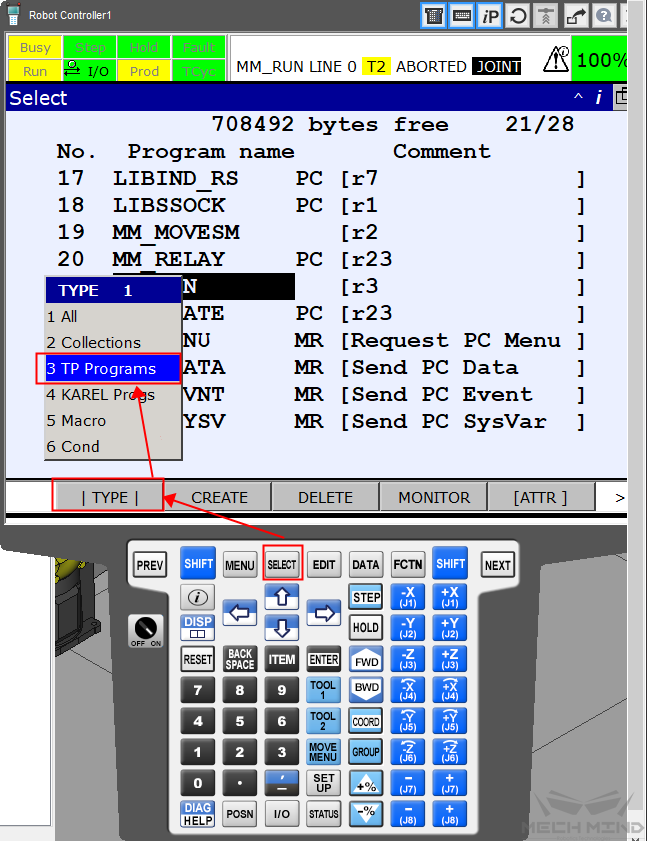
모드를 전환할 필요가 없고 USB를 삽입한 후 MEMU 버튼을 눌러 파일을 선택하세요. ENTER 를 클릭해 해당 폴더를 선택한 뒤 ENTER 를 누르면 모든 파일을 확인할 수 있습니다.
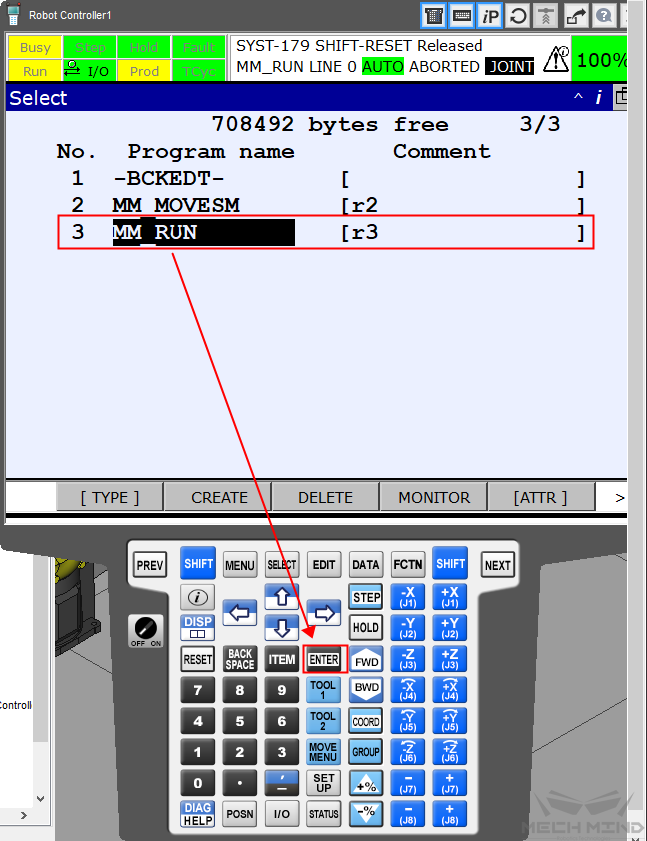
이 때 INSTALL.cm 파일 및 복제할 프로그램 폴더를 볼 수 있습니다; INSTALL.cm가 있는 항을 선택하고 티칭 머신에 ENTER 를 누르세요. 다음 그림을 참고하세요.
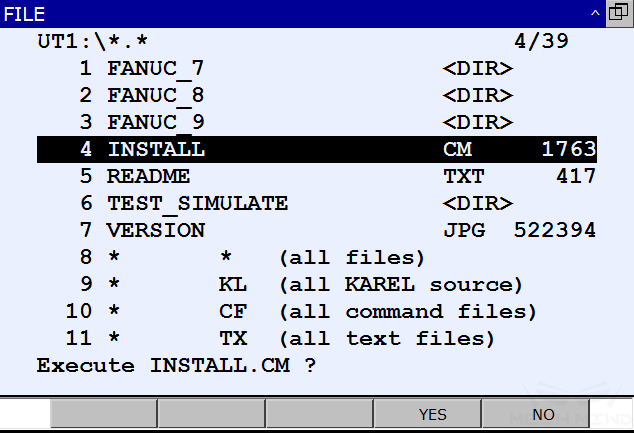
YES【F4】 를 눌러 원터치 프로그램 복제를 시작하세요.
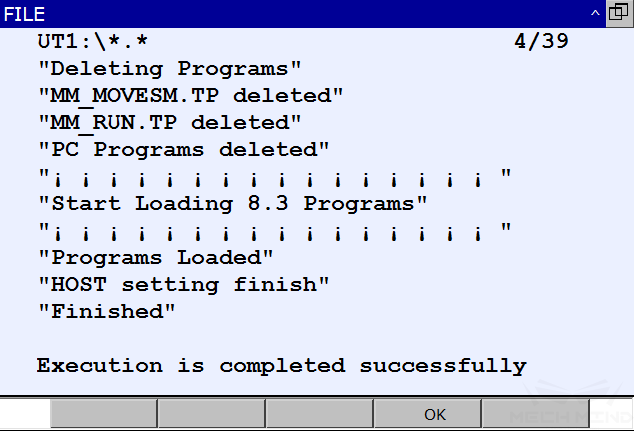
인터페이스에 다음과 같은 메시지가 나타나면 프로그램 복제 및 구성은 모두 완성된 것입니다. 이 때 F4 를 한번 더 누르면 프로그램을 종료할 수 있습니다.
UOP 관련 설정을 수정하기¶
다음과 같은 설정은 이미 사용되거나 설정된 로봇에 해당됩니다. 새로운 로봇이라면 이 스텝을 넘어가도 됩니다.
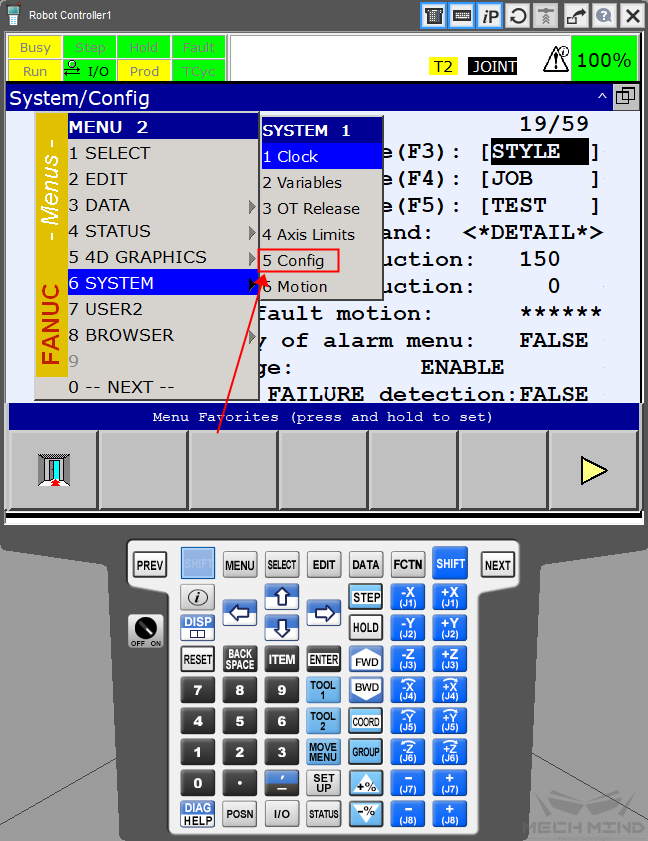
순으로 Menu → 0: Next → 6: SYSTEM → 5: Config 을 클릭하세요.
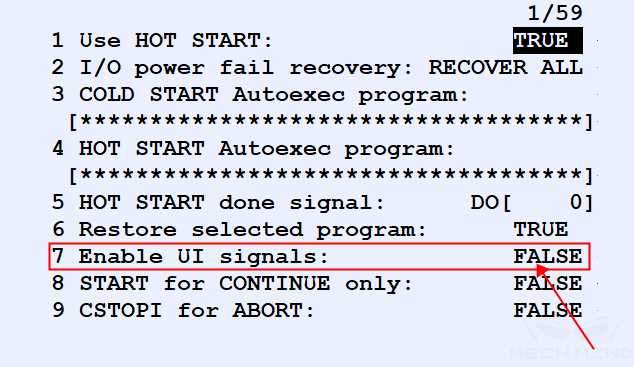
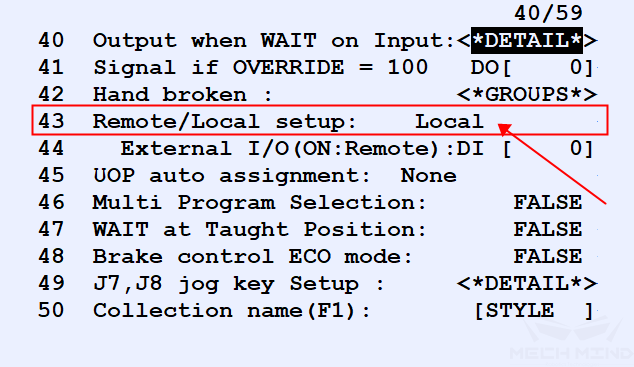
제 7 항의 Enable UI signals 를 FALSE 로 바꾸고 제 43 항의 Remote/Local setup 를 Local 로 바꾸세요.
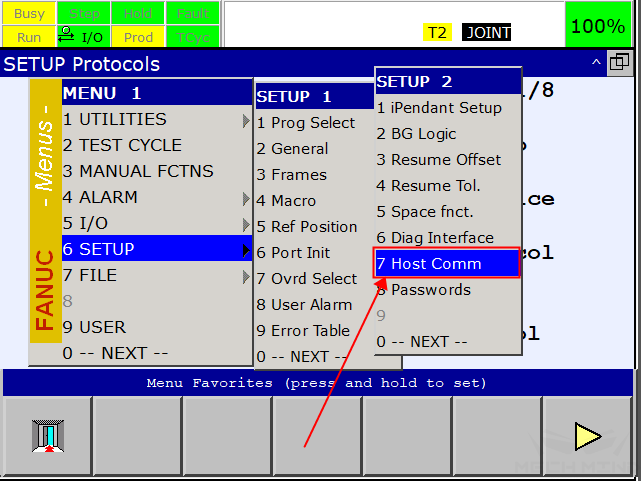
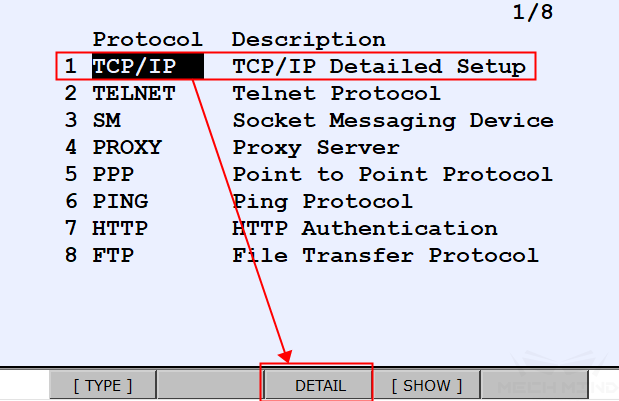
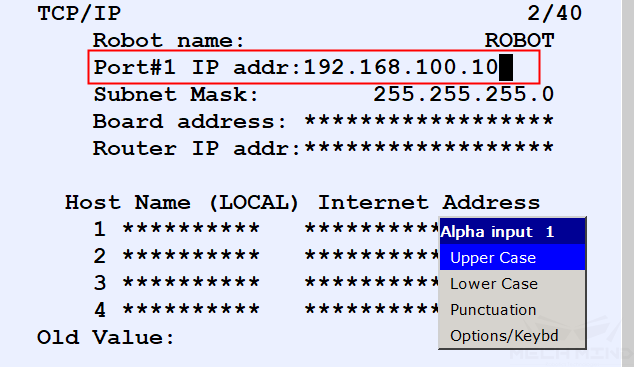
로봇 IP를 설정하고 프로그램을 실행하기¶
FANUC 소프트웨어 IO 구성 가이드¶
어떤 프로젝트에 DI는 1부터 입력하는 것이 아닙니다. 다양한 수요에 부합하기 위해 다음과 같은 수정을 할 수 있습니다.
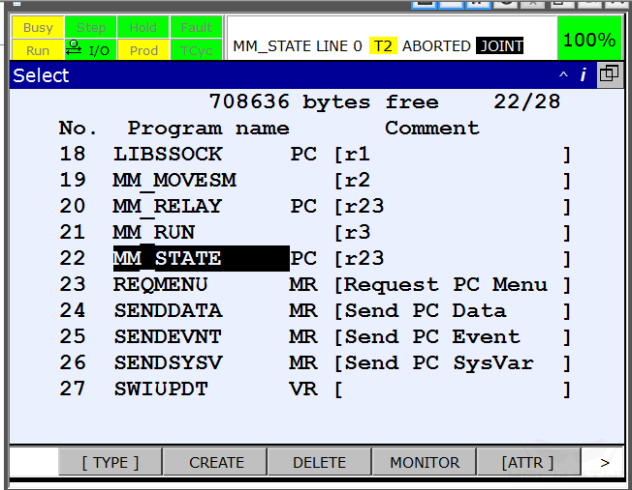
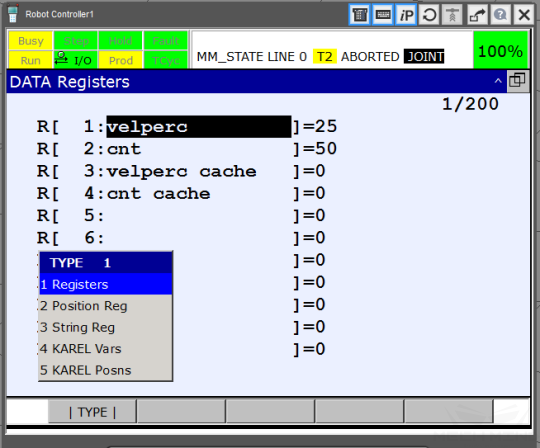
Select 를 클릭하세요.
Data 를 클릭하세요.
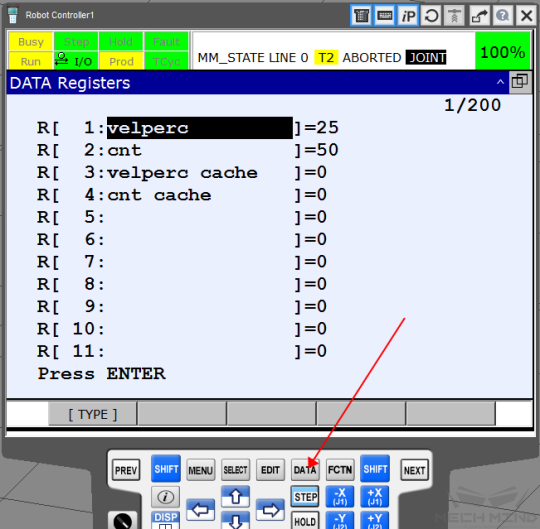
TYPE → KAREL Vars
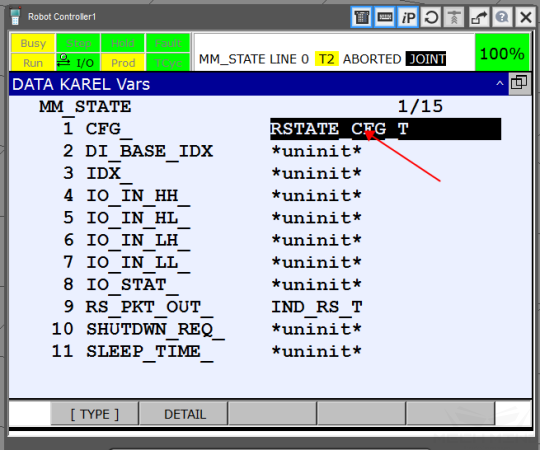
DI_BASE 파라미터를 수정하세요: 예를 들어, di가 19부터 시작한다면 0을 19로 수정해야 합니다. 이럴 때 DI 범위가 19-50이고 32-채널 입력이 가능합니다.