ABB 초기 설정¶
소프트웨어 설치 여부를 확인하기¶
주의
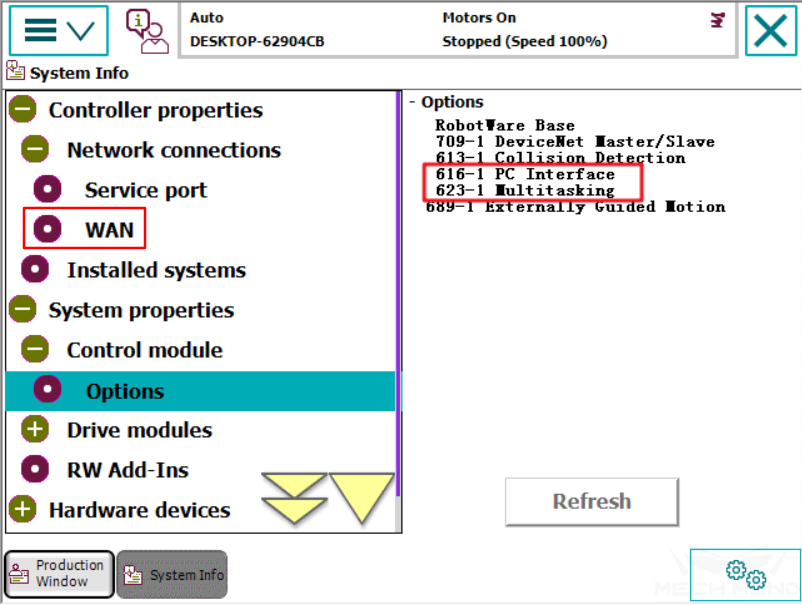
ABB 로봇이 623-1 Multitasking 및 616-1 PC Interface 두 가지 옵션을 설치해야 하며 RobotWare의 버전은 6.02이상이어야 합니다.
티칭 머신의 왼쪽 위를 클릭하여 메인 인터페이스로 들어가 순으로 System Info → System properties → Control module → Options 를 클릭하여 필수 소프트웨어가 설치되어 있는지 또는 버전이 요구에 부합하는지를 확인하세요.
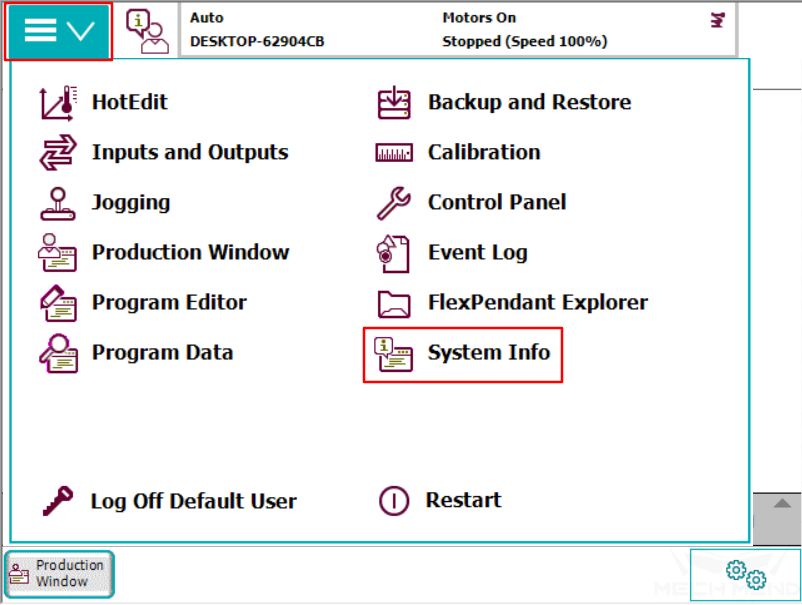
티칭 머신에 순으로 System Info → System properties 를 클릭하여 로봇의 RobotWare 버전을 확인하세요.
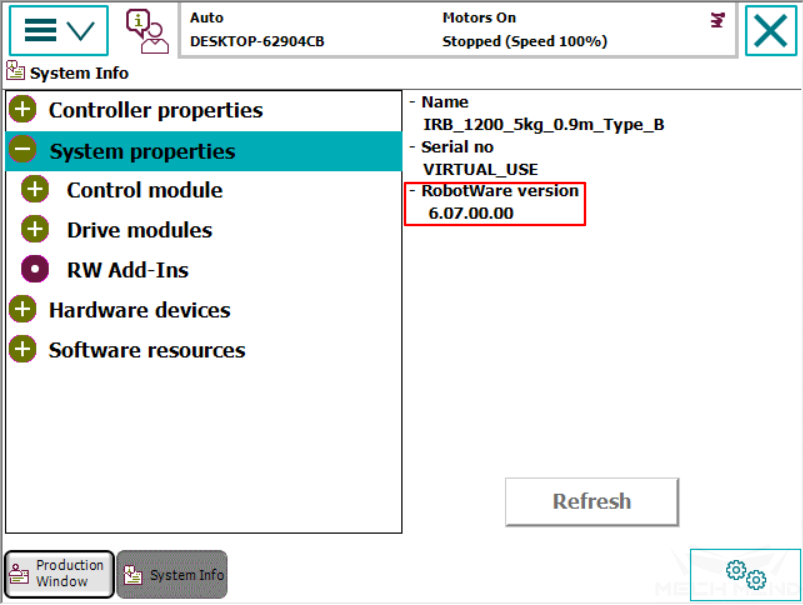
필수 소프트웨어가 모두 설치되고 버전이 요구에 부합해야 다음 단계인 프로그램 복제로 들어갈 수 있습니다; 623-1 Multitasking 및 616-1 PC Interface가 설치되지 않으면 ABB 개발 업체와 연락하여 설치하며 RobotWare의 버전이 6.02이하이면 ABB 개발 업체와 연락하여 업데이트하세요.
사전 준비¶
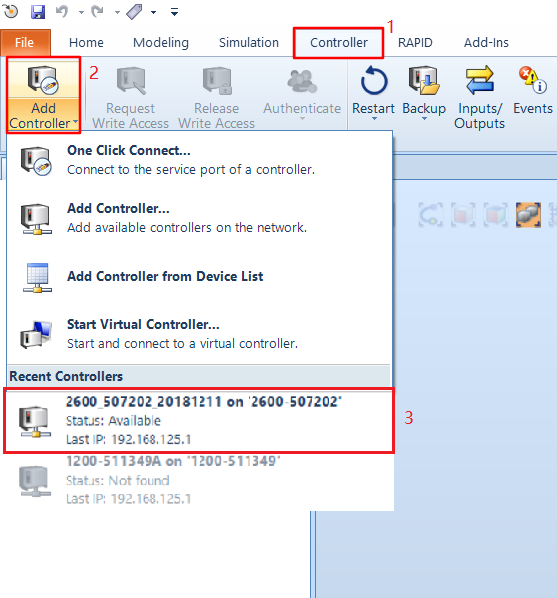
로봇 소프트웨어와 RobotWare 버전을 모두 확인한 다음에 X6 network port 를 통해 제어 캐비닛과 IPC를 연결시켜 로봇과 IPC가 동일한 네트워크 세그먼트에 있는 것을 확보하세요. 다음으로 복제할 프로그램 파일을 준비하세요. 주의해야 할 것은 폴더 안에 중국어가 나타나면 안됩니다 . 복제할 파일은 Mech-Center 루트 목록에 있는 Mech_RobServ/install_packages/abb/server on ABB 경로에서 찾을 수 있습니다.
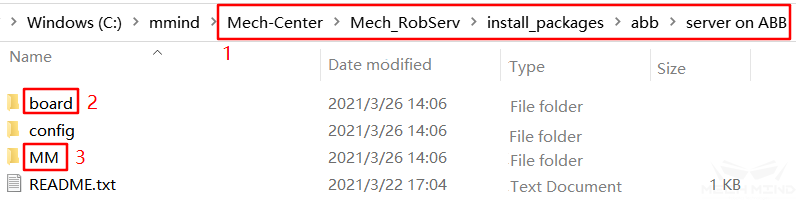
board 파일을 들여오기(티칭 머신 D652 미구성 정보의 보드를 예로 들음)¶
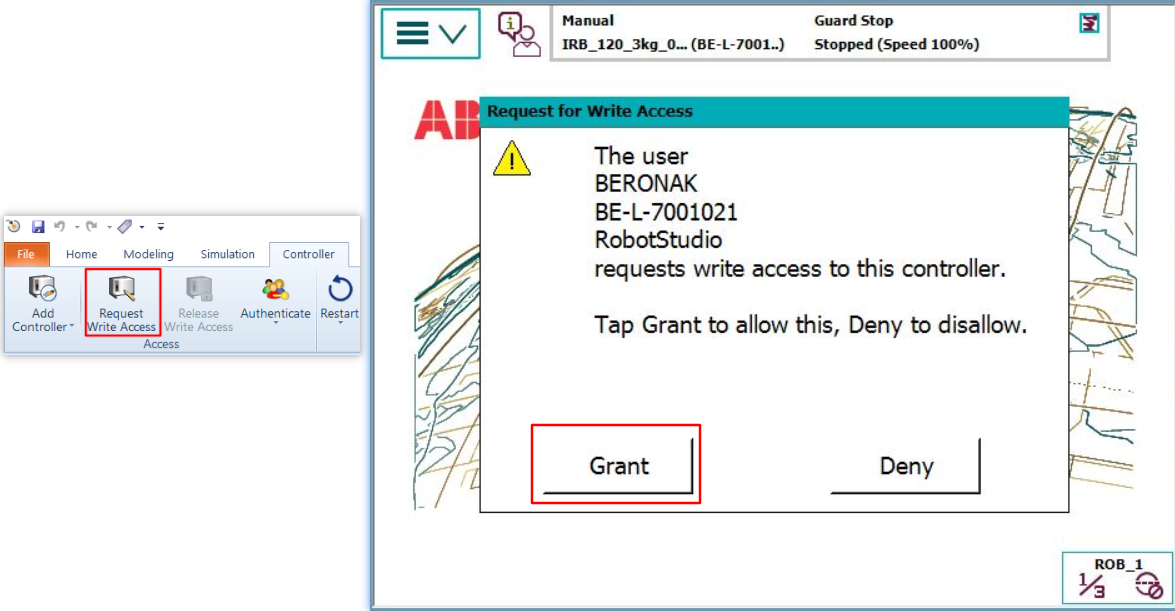
로봇 파일 쓰기 권한을 요청하세요.
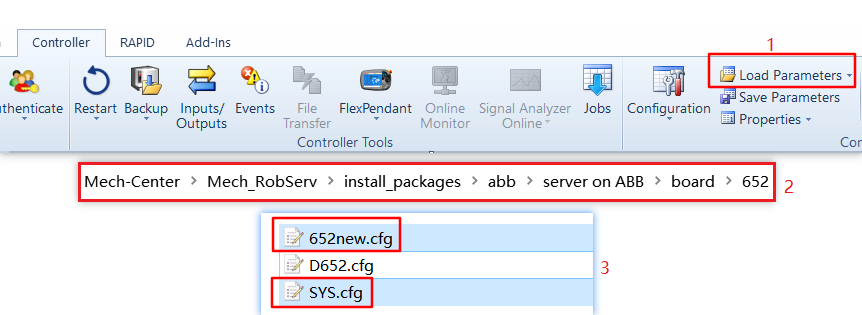
D652 구성 파일을 로봇 시스템으로 들여오고 확인하면 됩니다.
주의
작업 현장에 있는 로봇이 이미 티칭 머신에 D652 보드를 구성한 경우에는 **D652.cfg 및 SYS.cfg 두 개의 구성 파일을 복제해야 합니다;
작업 현장에 있는 로봇이 D652 보드의 하드웨어만 연결돼 있어 구성이 필요한 경우에는 **652new.cfg 및 SYS.cfg 두 개의 구성 파일을 복제해야 합니다;
작업 현장에 있는 로봇이 이미 티칭 머신에 1030 보드를 구성한 경우에는 **local_io.cfg 및 SYS.cfg 두 개의 구성 파일을 복제해야 합니다;
작업 현장에 있는 로봇이 1030 보드의 하드웨어만 연결돼 있어 구성이 필요한 경우에는 **1030new.cfg 및 SYS.cfg 두 개의 구성 파일을 복제해야 합니다;
작업 현장 보드의 명명을 주의하세요
로봇 프로그램을 들여오기¶
로봇의 프로그램 파일(MM폴더 안에 있음)을 파일 발송을 통해 로봇 시스템의 HOME 경로로 복사하고 로봇을 다시 작동시키면 로봇 프로그램 복제가 완성됩니다.
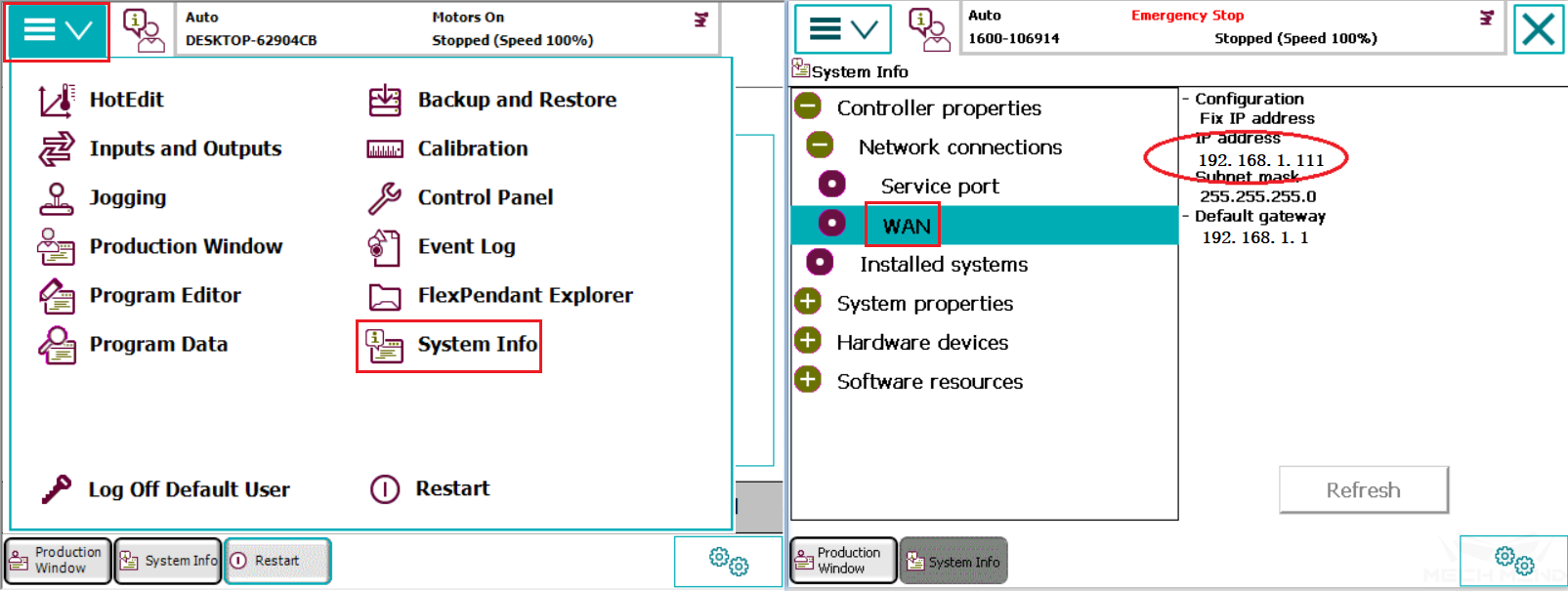
ABB 로봇의 IP를 수정하는 방법¶
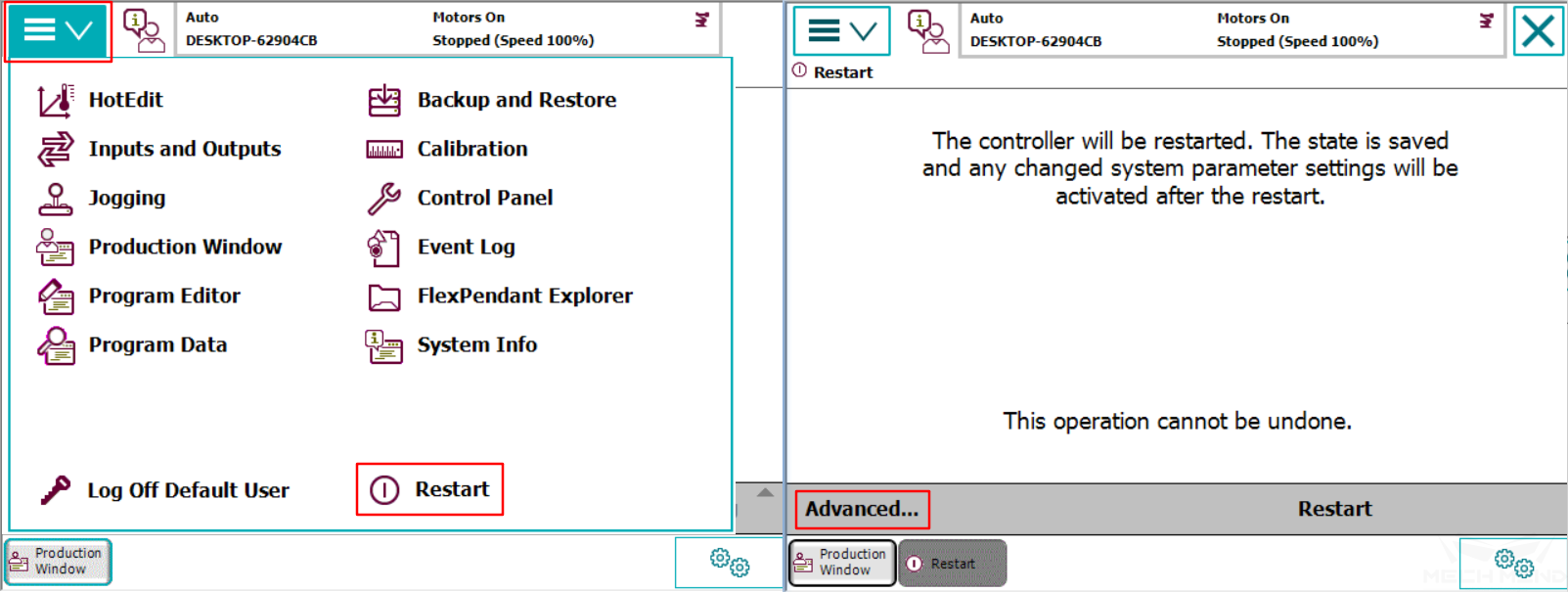
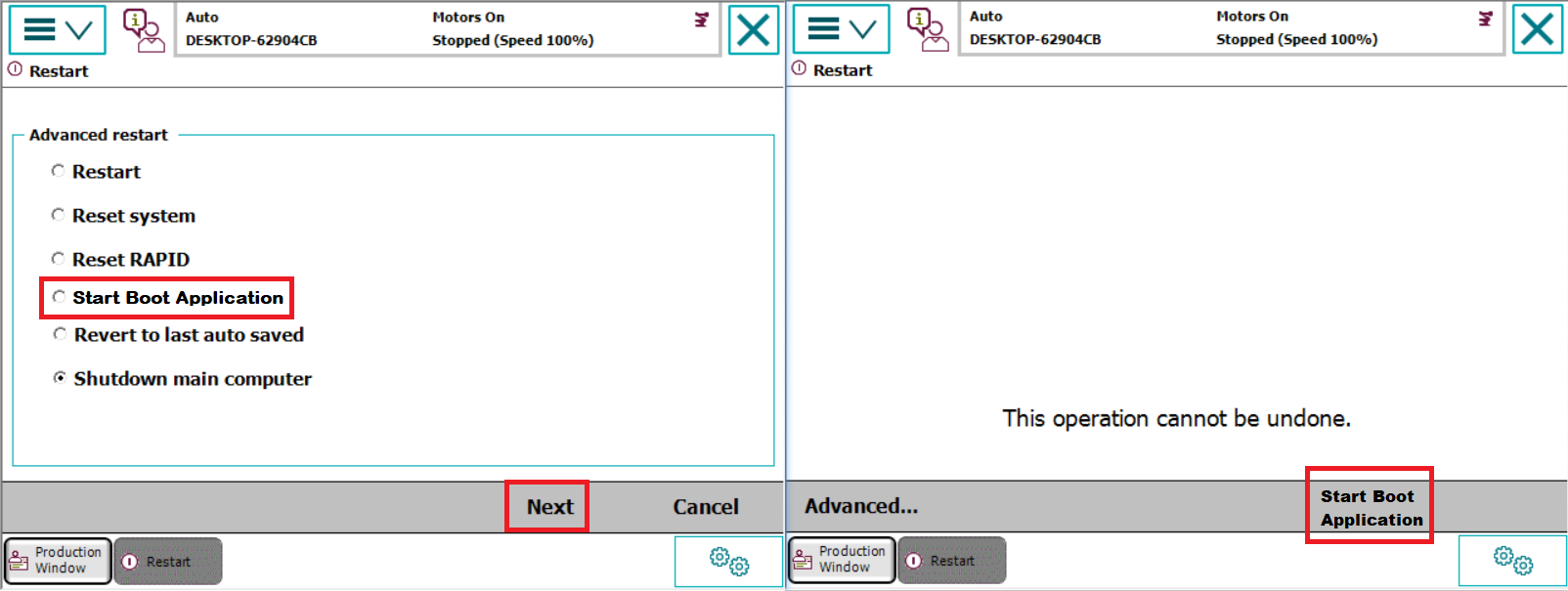
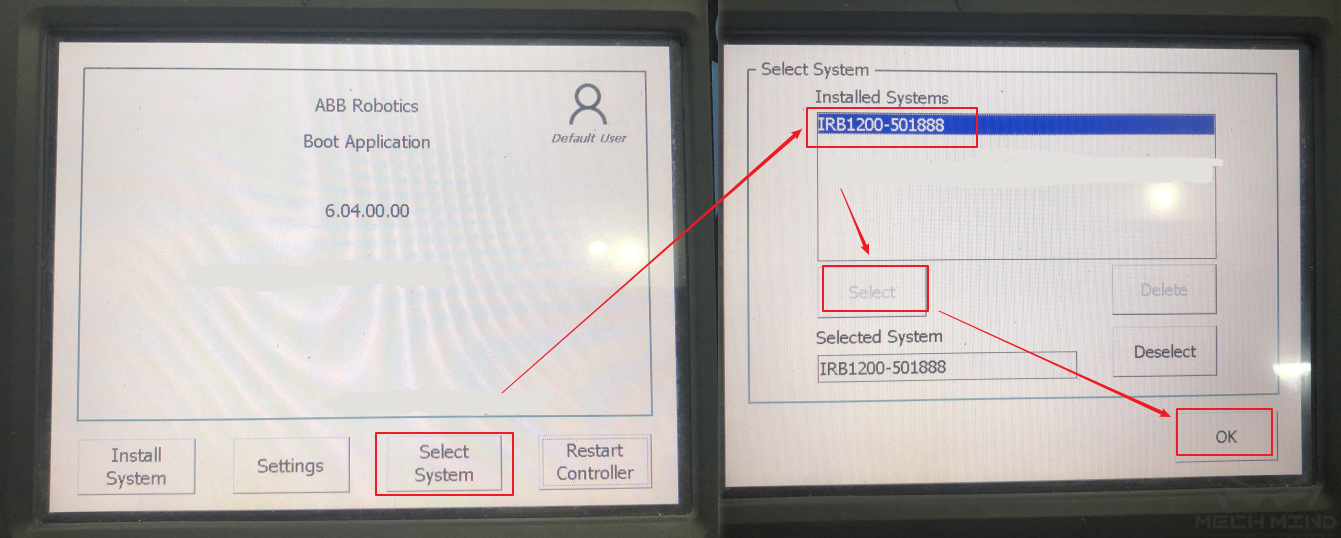
1.티칭 머신의 왼쪽 위를 클릭하고 메인 인터페이스로 들어가 순으로 Restart → Advanced → Start Boot Application 을 클릭하면 안내 응용 프로그램을 실행하여 로봇을 다시 작동될 것입니다.
2.로봇이 다시 작동한 다음에 Setting 페이지에 들어가 IP주소를 수정ㅎ세요.
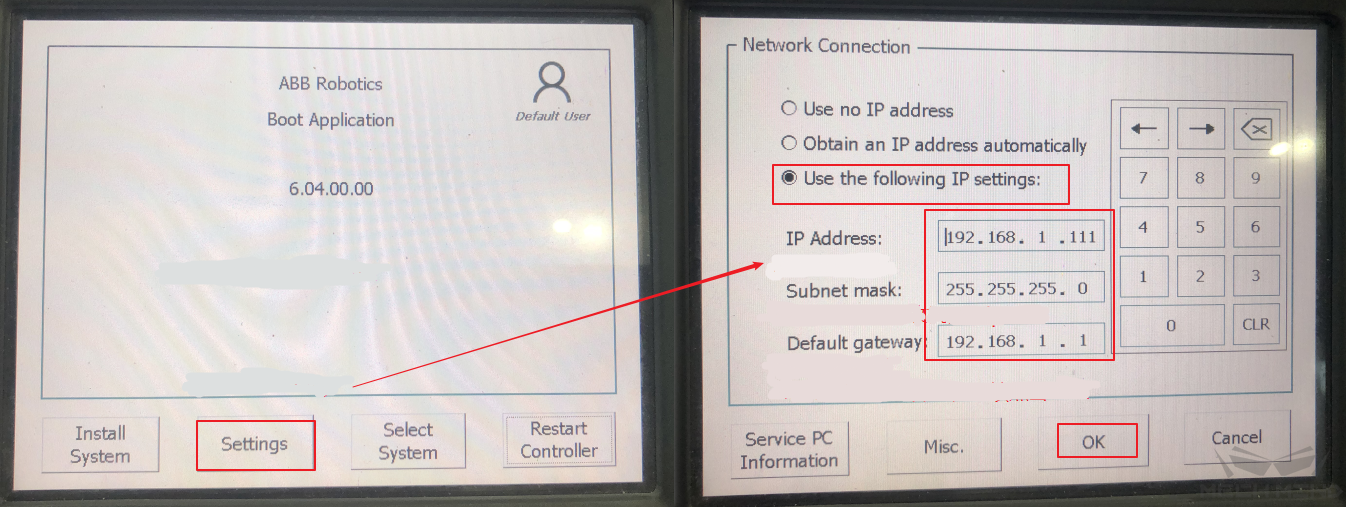
3.IP주소를 수정한 다음 로봇 시스템을 재부팅해야 수정이 적용될 수 있ㅅ니다.
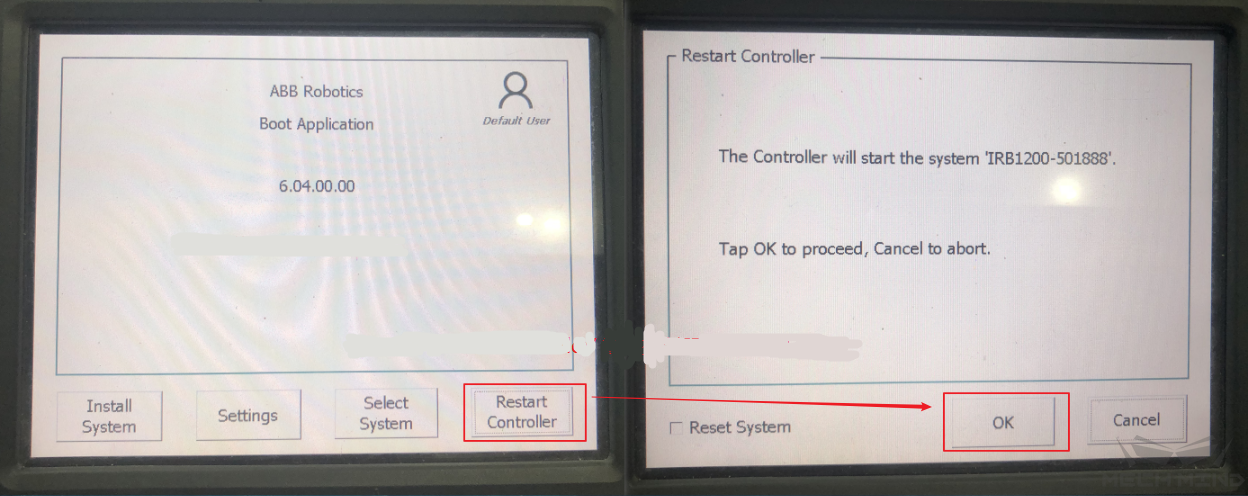
4.로봇 IP주소를 성공적으로 수정한 것을 확인하세요.