훈련에 필요한 데이터를 수집하기¶
데이터 수집하는 환경은 구체적인 요구에 반드시 부합해야 함.¶
인스턴스 세그멘테이션:데이터 수집하는 환경은 구체적인 요구에 반드시 부합해야 함. 내용을 참고하세요.
주의
이미지 분류는 조명 에 민감하며 데이터 수집 시 조명 조건이 일치해야 하며 일치하지 않을 경우 상황에 따라 따로 데이터를 수집해야 합니다.
데이터 수집 수량(이미지 캡처 수량)¶
한 종류씩 약 20 장을 캡처합니다.
이미지 캡처 시 물체의 배치 방식¶
요구에 따라 모든 배치 방식의 이미지를 합리적인 수량으로 캡처해야 합니다. 예를 들어 실제 생산 시 물체가 가로 배치된 것과 세로 배치된 것이 다 있는 경우에 가로 배치된 물체의 이미지만 캡처해서 훈련시키면 세로 배치된 물체에 대해 인식하지 못할 수도 있습니다. 따라서 데이터를 수집할 때 실제 생산의 모든 시나리오를 고려해야 합니다 . 구체적으로 다음과 같습니다:
수집한 데이터에 실제로 모든 가능한 타겟 물체 다른 각도 를 포함해야 합니다.
수집한 데이터에 실제로 모든 가능한 타겟 물체 다른 위치 를 포함해야 합니다.

Mech-Vision을 통해 데이터를 수집하기¶
위에 언급한 캡처 환경, 수량 및 배치 방식 등 요소를 모두 확인한 뒤 Mech-Vision을 통해 데이터를 수집하기 를 참고하세요.
기존 프로젝트 데이터 수집 양상¶
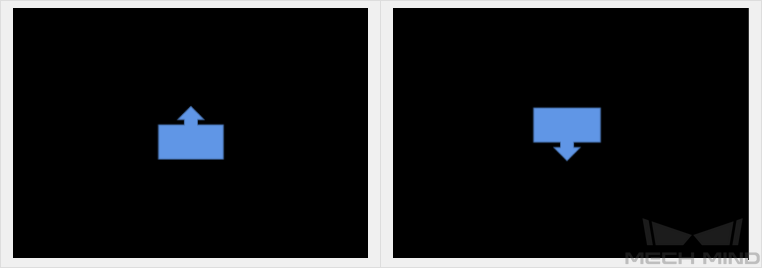
밸브 튜브 프로젝트에 물체 유형은 단일하며 앞면과 뒷면을 구분해야 하고 위치의 변동이 크지 않습니다. 이 때 앞면과 뒷면의 이미지를 각각 10장을 캡처하면 됩니다.
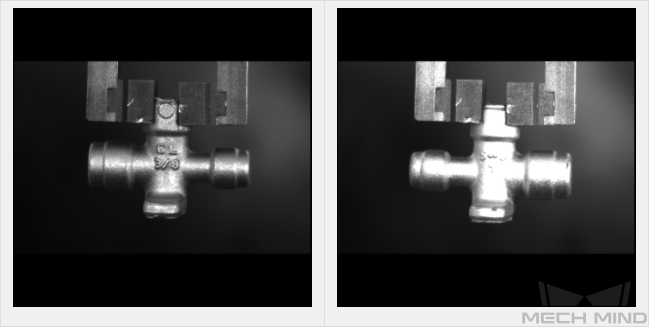
앞면 & 뒷면¶
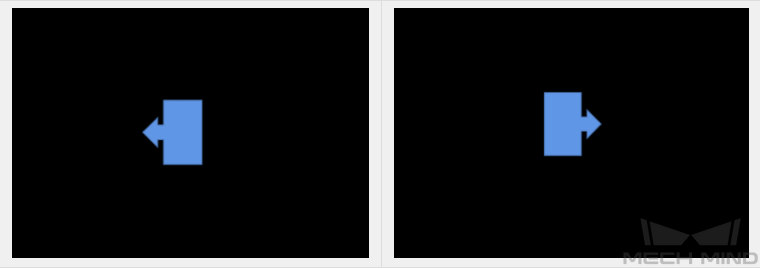
엔진 밸브 조립 프로젝트에 타겟 물체가 단일하며 부품이 카드 슬롯에 올바르게 배치되었는지 여부를 판단해야 합니다. 카드 슬롯 외부에 배치할 때 더 많은 자세가 있을 수 있으므로 다른 위치 및 다른 각도로 배치된 가능성을 고려해야 하며 각 상황별로 20장 캡처하면 되고 카드 슬롯에 놓을 때 위치가 다른 상황만 고려하여 10장 정도 캡처하면 됩니다.
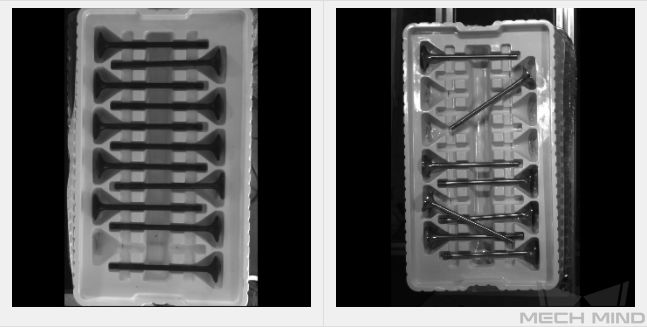
카드 슬롯 내부 & 카드 슬롯 외부¶
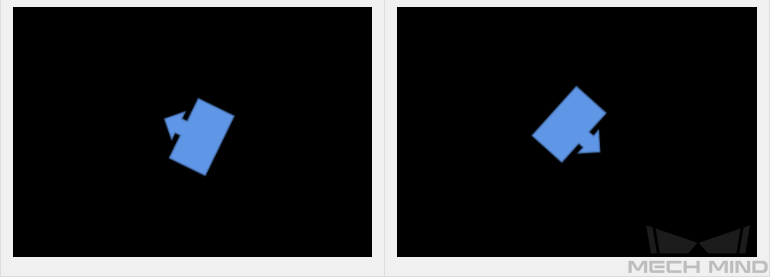
금속 칩 프로젝트에 두 가지 유형의 물체가 있으며 사이즈를 구분해야 합니다. 이 때 배치된 위치 또는 각도가 다른 상황이 나타날 수 있으므로 앞면과 뒷면에 대해 각각 20장을 캡처하면 됩니다.
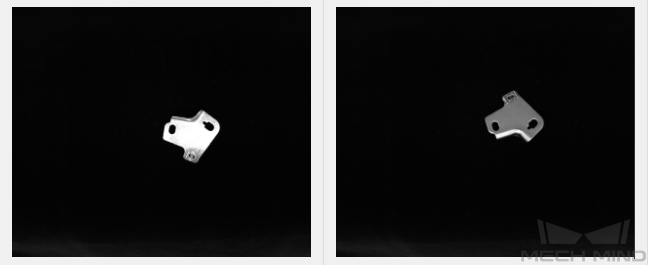
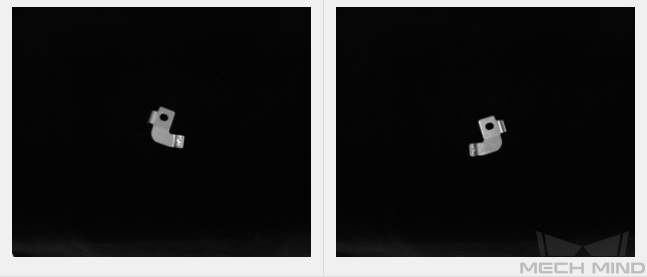
앞면 & 뒷면¶