標準インターフェースコマンドの呼び出し流れ¶
本節では、通信対象(ロボット、PLC)に応じた具体的な呼び出し流れや、標準インターフェースコマンドの関係について説明します。
ロボットプログラム呼び出しコマンド¶
作成するプロジェクトによって、ロボットプログラムが呼び出すコマンドは、 Mech-Visionプロジェクトに関連するコマンド と Mech-Vizプロジェクトに関連するコマンド の2種類に分けられます。
Mech-Visionプロジェクトに関連するコマンド¶
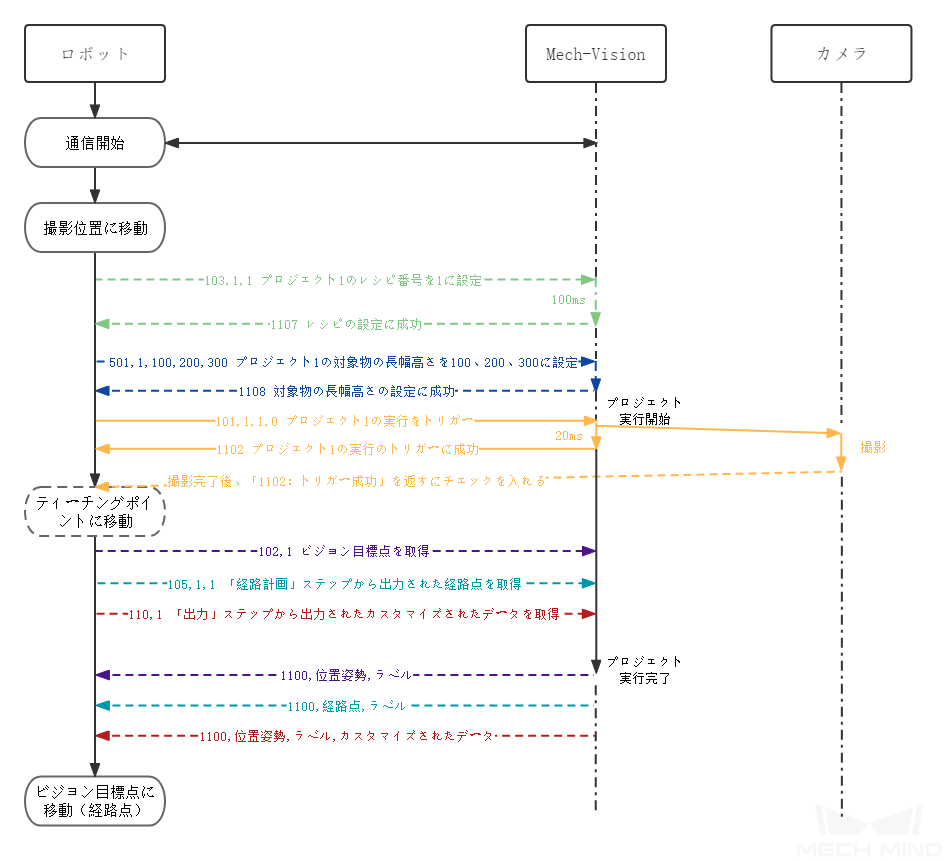
Mech-Visionプロジェクトに関連するコマンドの呼び出し順は、以下の通りです。
Mech-Visionプロジェクトの実行(101コマンド)をトリガーする前に呼び出すコマンド:
プロジェクトレシピの設定(103コマンド)
対象物寸法の設定(501コマンド)
Mech-Visionプロジェクトの実行をトリガー(101コマンド)。
Mech-Visionプロジェクトの実行中に呼び出しコマンド:
ビジョン目標点の取得(102コマンド)
「経路計画」ステップから出力された経路点を取得(105コマンド)
「出力」ステップから出力されたカスタマイズされたデータを取得(110コマンド)
Mech-Visionプロジェクトによく使うコマンドの呼び出し流れを下図に示します。点線はオプションコマンド(実際のプロジェクトに応じて呼び出すかどうか)、実線は必ず呼び出さなければならないコマンドを示しています。
Mech-Vizプロジェクトに関連するコマンド¶
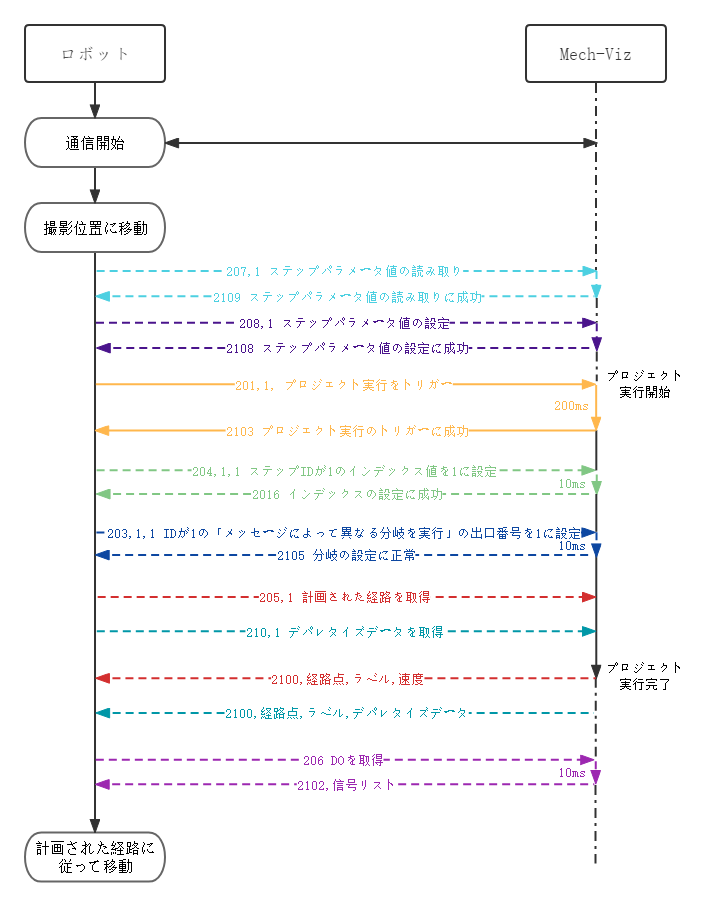
Mech-Vizプロジェクトに関連するコマンドの呼び出し順は、以下の通りです。
Mech-Vizプロジェクトの実行(201コマンド)をトリガーする前に呼び出すコマンド:
ステップパラメータ値の読み取り(207コマンド)
ステップパラメータの設定(208コマンド)
Mech-Vizプロジェクトの実行をトリガー(201コマンド)。
Mech-Vizプロジェクトの実行中に呼び出しコマンド:
インデックス付きのステップのインデックス値を設定(204コマンド)
「メッセージによって異なる分岐を実行」の出口番号を設定(203コマンド)
Mech-Vizによって計画された経路を取得(205コマンド)
デパレタイズデータの取得(210コマンド)
注意
コマンド204と203は、コマンド205と210の前に呼び出す必要があります。
Mech-Vizプロジェクトの実行後に呼び出しコマンド:
DOリストを取得(206コマンド)
Mech-Vizプロジェクトによく使うコマンドの呼び出し流れを下図に示します。点線はオプションコマンド(実際のプロジェクトに応じて呼び出すかどうか)、実線は必ず呼び出さなければならないコマンドを示しています。
PLCプログラム呼び出しコマンド¶
PLCプログラム呼び出しコマンドの流れを下図に示します。
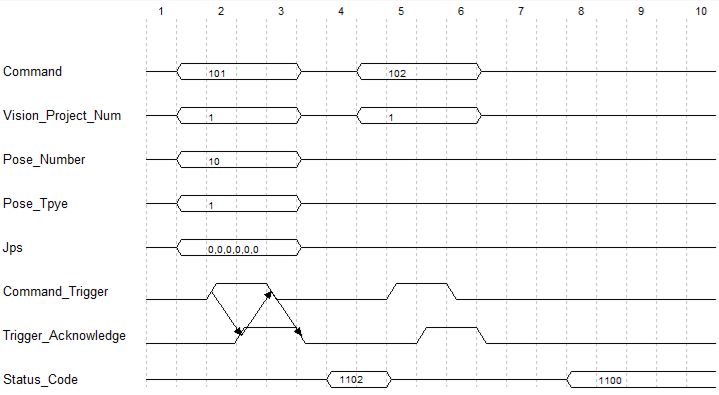
説明:
各コマンドの要求に従って、コマンドコードとコマンドパラメータを対応するレジスタに書き込みます。例えば、101はCommandに、1(プロジェクト番号)はVision_Project_Numに書き込まれます。
コマンドがトリガーされると、PLCはCommand_Triggerを1に設定し、ビジョンシステムはコマンドコードとコマンドパラメータを読み取ります。
ビジョンシステムは、Command_Triggerが1であることを読み取ると、Trigger_Acknowledgeを1に設定します。
PLCはTrigger_Acknowledgeが1であることを読み取ると、Command_Triggerをリセットします。その後、次のコマンドコードとコマンドパラメータを対応するレジスタに書き込むことができます。
ビジョンシステムは、Command_Triggerが0であることを読み取ると、Trigger_Acknowledgeを0に設定します。
各コマンドの呼び出し流れについての詳細は、 Mech-Visionプロジェクトに関連するコマンド と Mech-Vizプロジェクトに関連するコマンド をご参照ください。