Mech-Centerを使ってみる¶
ソフトウェアを設定¶
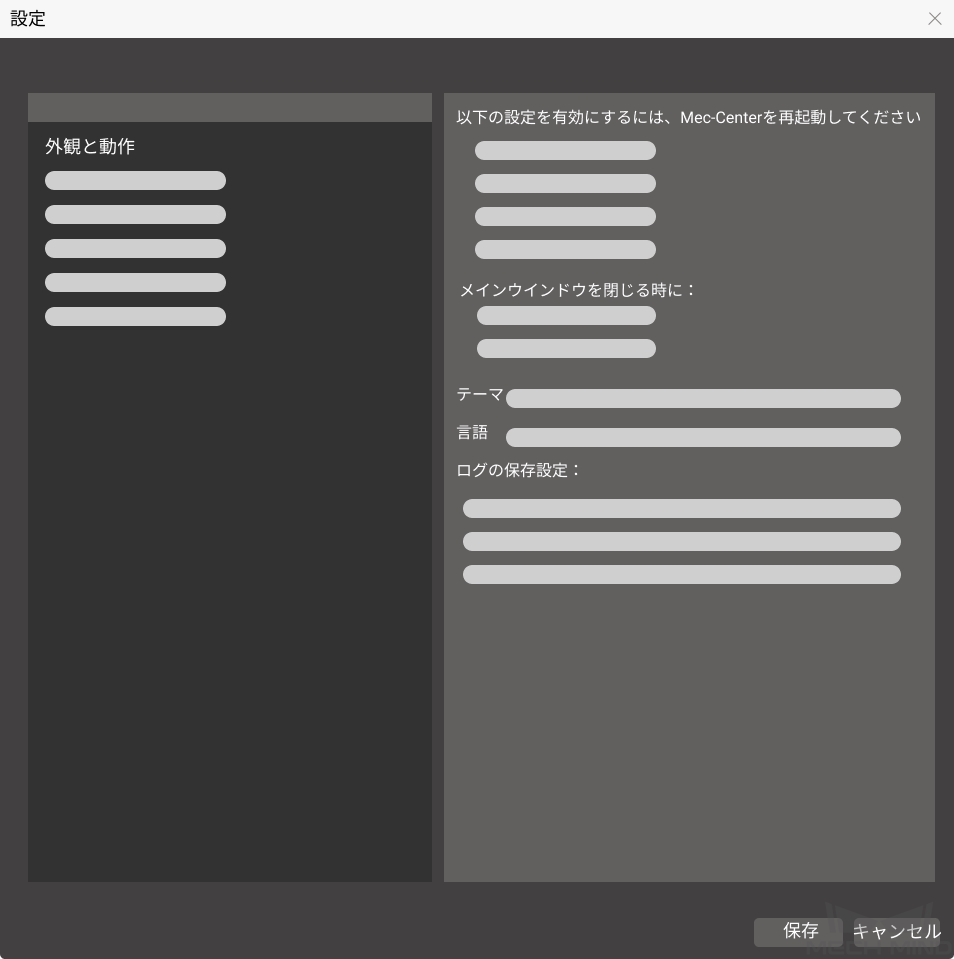
下図に示すように、Mech-Centerを起動し、 ツールバー での ![]() アイコンをクリックして「設定」画面に入ります。この画面で、パス、パラメータなどを設定してから「保存」をクリックします。詳しくは、 設定 をご参照ください。
アイコンをクリックして「設定」画面に入ります。この画面で、パス、パラメータなどを設定してから「保存」をクリックします。詳しくは、 設定 をご参照ください。
ヒント
実際の状況に応じてソフトウェアを設定してください。
Mech-Vision、Mech-VizおよびMech-Eye Viewerがインストールされた後、それらのパスが「設定」に自動的に読み込まれるので、手動で入力する必要はありません。
プロジェクトを開く¶
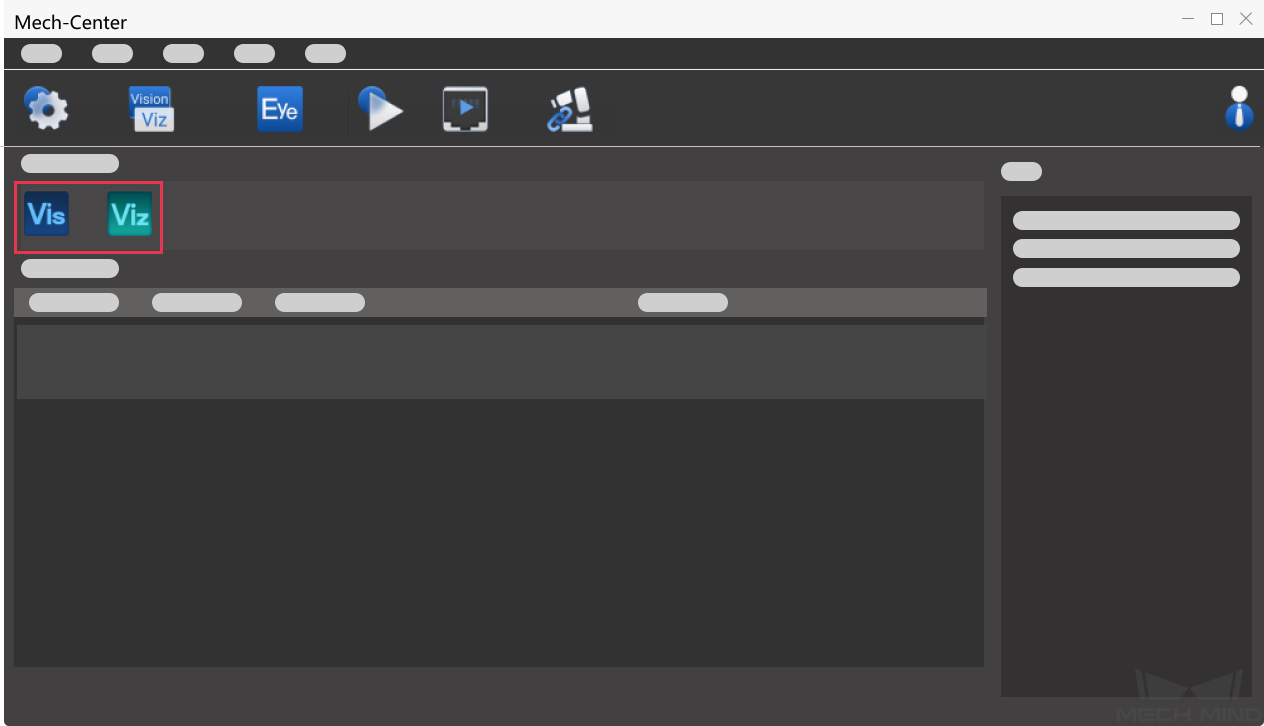
ツールバー の ![]() をクリックすれば、Mech-VizおよびMech-Visionが起動されます。また、それらのアイコンはサービスステータスバーに表示されます。
をクリックすれば、Mech-VizおよびMech-Visionが起動されます。また、それらのアイコンはサービスステータスバーに表示されます。
Mech-Vizプロジェクトを開く¶
ソフトウェアのインターフェイスに入る:
 をクリックしてMech-Vizのメインインターフェイスに入ります。
をクリックしてMech-Vizのメインインターフェイスに入ります。プロジェクトを構築: プロジェクトを新規作成するか、既存のファイルを開きます。
Mech-Vizプロジェクトリソースのパネルで、プロジェクト名を右クリックして 自動的に読み込む にチェックを入れます。
プロジェクトステータスを表示:現在のプロジェクトの実行ステータスがプロジェクトステータスバーに表示されます。
ヒント
自動的に読み込む にチェックを入れた後、Mech-VizプロジェクトパスがMech-Centerの 設定 -> Mech-Viz -> プロジェクトパス に自動的に記入されます。
Mech-Visionプロジェクトを開く¶
ソフトウェアのインターフェイスに入る:
 をクリックしてMech-Visionのメインインターフェイスに入ります。
をクリックしてMech-Visionのメインインターフェイスに入ります。ソリューションまたはプロジェクトを構築:詳細については、 ソリューションを新規作成 、 プロジェクトを新規作成 をご参照ください。
自動読み込み設定:詳細については、 ソリューションの自動読み込み または プロジェクトの自動読み込み をご参照ください。
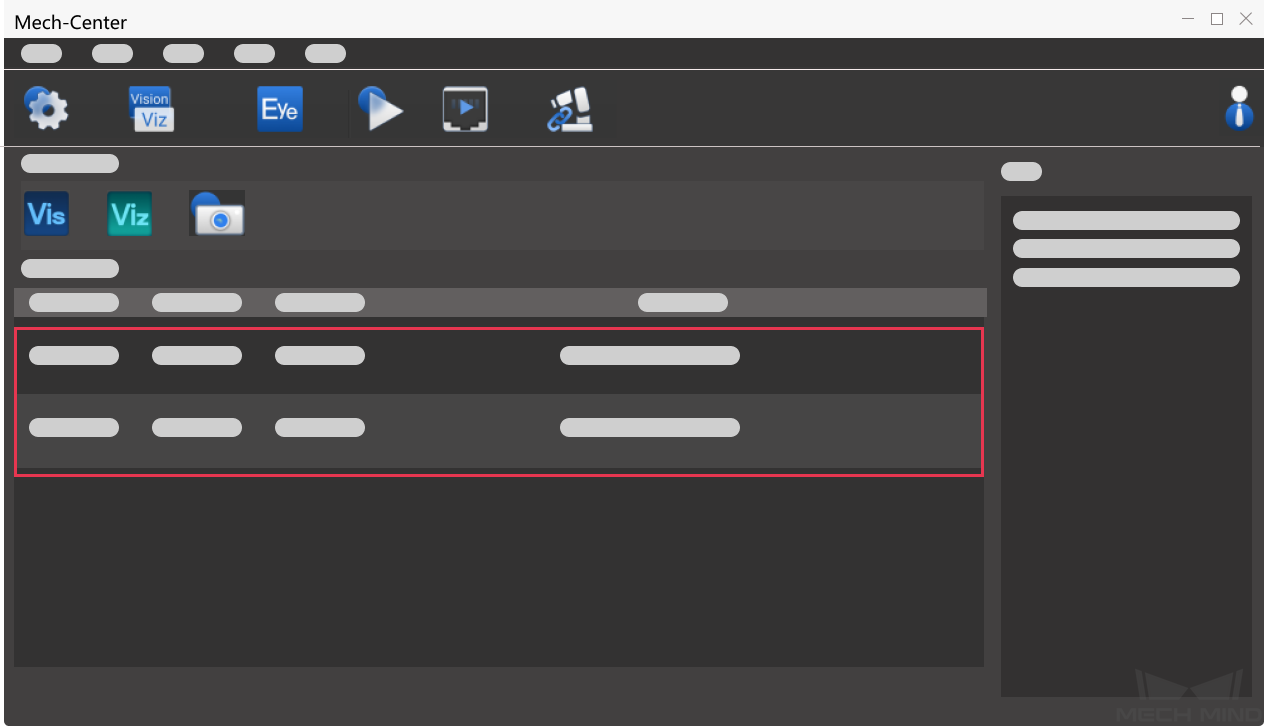
プロジェクトステータスを表示:下図に示すように、現在のプロジェクトの実行ステータスがプロジェクトステータスバーに表示されます。
ロボットを接続¶
現場で使用するロボットがURロボットでない場合、ロボットプログラミングが必要です。ロボットプログラミングについては、 ロボット通信設定 をご参照ください。 ツールバー での ![]() をクリックしてロボットに正常に接続すると、ロボットのアイコンはサービスステータスバーに表示されます。
をクリックしてロボットに正常に接続すると、ロボットのアイコンはサービスステータスバーに表示されます。
Mech-Interfaceを使用するプロジェクトの場合、 ツールバー での ![]() をクリックしてインターフェースサービスが起動されると、対応するアイコンはサービスステータスバーに表示されます。
をクリックしてインターフェースサービスが起動されると、対応するアイコンはサービスステータスバーに表示されます。
プロジェクトを実行¶
ヒント
ロボット実機を動作させる場合、 「設定」 の「Mech-Viz」画面で 実行をシミュレート のチェックを外してください。
下図に示すように、ツールバーでの ![]() をクリックして確認ポップアップウィンドウが表示された後、 Yes をクリックして読み込まれたプロジェクトが実行されます。また、プロジェクトの実行情報がプロジェクトステータスバーに表示されます。
をクリックして確認ポップアップウィンドウが表示された後、 Yes をクリックして読み込まれたプロジェクトが実行されます。また、プロジェクトの実行情報がプロジェクトステータスバーに表示されます。
注意
プロジェクトが読み込まれた後、プロジェクトを実行します。
Mech-Vizプロジェクトを開くときに ソフトウェア互換性の説明 を処理しない場合は、Mech-Centerで 実行 をクリックすると、Mech-Centerのログに「Mech-Vizはプロジェクトを読み込んでいます。Mech-Vizプロジェクトを起動できません:XXX」というメッセージが表示されます。この時点で、ソフトウェア互換性プロンプトに対処する必要があります。つまり、ソフトウェア互換性プロンプトで Yes をクリックし、Mech-Center実行ボタンを復元して再度実行する必要があります。
ロボット動作中に安全を必ず確保してください。 緊急事態が発生した場合は、ティーチペンダントの非常停止ボタンを押してください!
標準インターフェースに使用されるMech-Vizサンプルプロジェクト¶
標準インターフェースに使用されるサンプルプロジェクトは、Mech-Centerのインストールディレクトリ(tool¥viz_project) に格納されています。
check_collision
ビジョンシステムによるピッキングの動作計画と衝突検出を行うために使用されます。
outer_move
ロボットが外部クライアントから入力された位置姿勢に移動する必要があるシーンに使用されます。
suction_zone
DO信号リストを介して複数の吸盤パーティション(または配列ツール)を制御するために使用されます。
vision_result_reuse
同じ返されたビジョン結果を複数回使用する必要があるビジョンガイドによるピッキングの経路計画と衝突検出を行うために使用されます。