软硬件系统¶
硬件系统结构说明¶
梅卡曼德机器人的产品在实际应用中需要基于一个完整的系统来实现功能。通常情况下一个系统会包括三个主要模块: 机器人模块 , 相机模块 和 计算机模块 。对于三大模块的通信,推荐采用以太网连接。
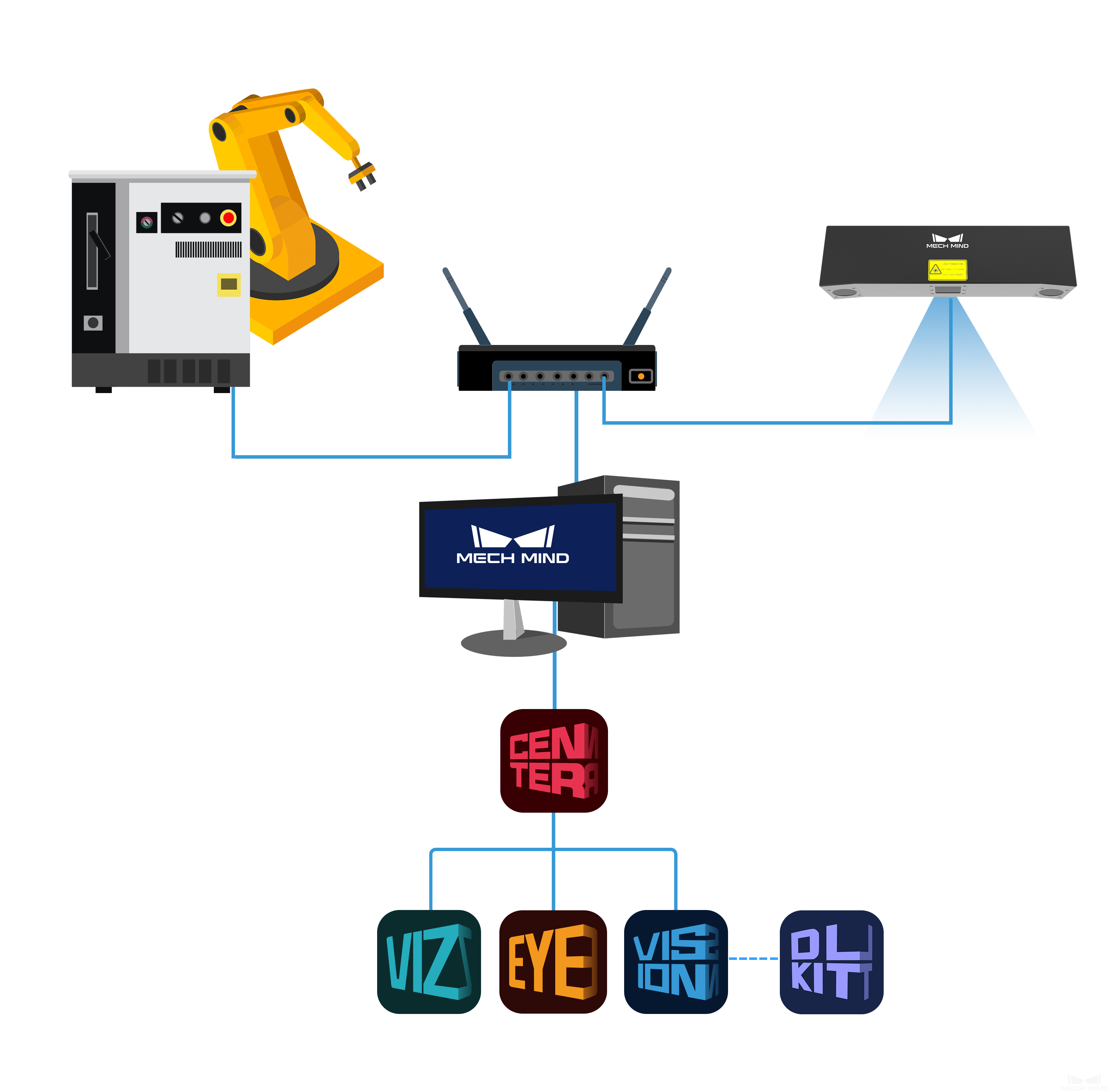
图1 硬件系统结构¶
软件系统结构说明¶
Mech-Mind软件系统主要有以下两种构建形式:
软件系统主控
Mech-Mind软件系统中,绝大多数机器人都可以通过接入软件系统,实现软件系统对机器人的完全控制,即软件系统为主站,机器人为从站。梅卡曼德自主研发的Mech-Viz软件可以实现对机器人的完全控制和动态仿真,并具有路径规划、碰撞检查、奇异点避免等多种实用功能。这种系统搭建形式广泛使用于应用较为简单、机器人工艺流程较为简短的场景中。机器人或上位机主控
对于复杂系统、机器人工艺流程较为繁琐的情况,考虑到后期维护的便捷性,也可以采用机器人或上位机主控,即视觉系统做从站,只发送视觉点或简单路径的形式。上位系统在合适的时机触发相机进行拍照,视觉系统对图像处理后将结果返回给上位机暂存,上位机在需要视觉结果时直接调用即可。在这种系统搭建形式中,通常需要用到单独编写的Adapter进行信号的转换和中继。对于尚未适配的机器人,即视觉系统还未实现对机器人的完全控制,则只能采用发送视觉点的形式。
在Mech-Mind软件系统中,梅卡曼德自主研发了 Mech-Center 、 Mech-Eye Viewer 、 Mech-Vision 和 Mech-Viz 软件。详细的介绍请参考: Mech-Mind软件系统简介